
GPS sehr ungenau
- Themenstarter Q-Man
- Beginndatum
Die 35mm Antenne ist gekommen ")
Hier die Messergebnisse:
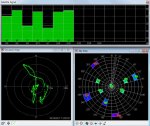
Die Antenne, so wie sie ist.
Wieder im Garten, um die Ergebnisse mir der vorhergehenden zu vergleichen
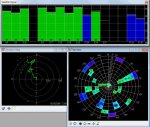
Die selbe Position, diesmal aber auf dem Shield.
Ich erkenne eineverbesserung von 47dB auf 50db.
3dB entsprechen einer Verdopplung des Antennensignal!
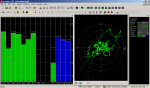
Auf dem Berg. Freie Sicht in alle Richtungen. Mit Shield.
Ich bin begeistert! 3D Modus mit DGPS
Hier die Messergebnisse:
Die Antenne, so wie sie ist.
Wieder im Garten, um die Ergebnisse mir der vorhergehenden zu vergleichen
Die selbe Position, diesmal aber auf dem Shield.
Ich erkenne eineverbesserung von 47dB auf 50db.
3dB entsprechen einer Verdopplung des Antennensignal!
Auf dem Berg. Freie Sicht in alle Richtungen. Mit Shield.
Ich bin begeistert! 3D Modus mit DGPS
Zuletzt bearbeitet:
Einbau der Antenne in den Shield.
Ich habe mittig in den Shield eine Aussparung eingearbeitet in die die Masse Platte der GPS Antenne passt.


Für das Antennenkabel habe ich noch eine 2x4mm Aussparung vorgesehen. Die Ecken sind noch ein wenig größer, damit die Lötstellen auch in den Shield eintauchen können.

Hier nocheinmal der Größenvergleich, alte / neue Antenne:

Den GPS Empfänger habe ich mit Klettband auf der Innenseite an der Antenne befestigt.

Ich habe mittig in den Shield eine Aussparung eingearbeitet in die die Masse Platte der GPS Antenne passt.
Für das Antennenkabel habe ich noch eine 2x4mm Aussparung vorgesehen. Die Ecken sind noch ein wenig größer, damit die Lötstellen auch in den Shield eintauchen können.
Hier nocheinmal der Größenvergleich, alte / neue Antenne:
Den GPS Empfänger habe ich mit Klettband auf der Innenseite an der Antenne befestigt.
Die Tests zeigen eine sehr geringe Abweichung. GPS Hold muss aber noch etwas gedämpft werden.
Da ich finde das ich eine passende Lösung für das Problem gefunden habe, wer ich jetzt wieder am Hauptthema arbeiten:
Baubericht-X525-Quadrokopter-mir-MultiWii-SE-2-1-und-GPS-über-I2C
Da ich finde das ich eine passende Lösung für das Problem gefunden habe, wer ich jetzt wieder am Hauptthema arbeiten:
Baubericht-X525-Quadrokopter-mir-MultiWii-SE-2-1-und-GPS-über-I2C
Zuletzt bearbeitet:
Hallo
An manchen Tage sollte man ganz auf den GPS Betrieb in der Fliegerei verzichten,
in einigen Coptershops wird auch bei der Naza darauf hin gewiesen das wenn der GPD STatus auf Gelb steht

sollte man die Naza mit GPS nicht benutzen das die Stöhrungen sehr stark sind.
Das habe ich leider schon selber merken müssen.
GPS Status
Gruß
Christian
An manchen Tage sollte man ganz auf den GPS Betrieb in der Fliegerei verzichten,
in einigen Coptershops wird auch bei der Naza darauf hin gewiesen das wenn der GPD STatus auf Gelb steht
sollte man die Naza mit GPS nicht benutzen das die Stöhrungen sehr stark sind.
Das habe ich leider schon selber merken müssen.
GPS Status
Gruß
Christian
Ich habe nun auch ein Shield gebaut. Die Patchantenne habe ich erstmal gelassen vom Crius CN-06 (13x13 mm)
Das Ergebnis sieht nicht schlecht aus. Weniger Streuung der Standortkoordinaten und ein schnellerer Fix. Und ich habe das Ganze bislang nur auf dem Balkon getestet. Es sind also noch ein paar mehr Satelliten drin.
Grüße
Sebastian
Das Ergebnis sieht nicht schlecht aus. Weniger Streuung der Standortkoordinaten und ein schnellerer Fix. Und ich habe das Ganze bislang nur auf dem Balkon getestet. Es sind also noch ein paar mehr Satelliten drin.
Grüße
Sebastian
Anhänge
-
 24,7 KB Aufrufe: 41
24,7 KB Aufrufe: 41 -
 24,9 KB Aufrufe: 34
24,9 KB Aufrufe: 34
Hallo Jörg, hallo Zusammen,
ich habe mir nun an das CRIUS CN-06 (V1) ein EEPROM zum Speichern der Configdaten dran gelötet. Dazu habe ich dieses hier bei Conrad gekauft:
http://www.conrad.de/ce/de/product/...it-Organisation-4-K-x-8?queryFromSuggest=true
Wie es geht kann man hier sehen: http://www.pial.net/post/Crius-CN-06-GPS-v10-module-EEPROM-mod.aspx
Die Details zum EEPROM (PINs etc) stehen auf der Conrad-Seite.
Jetzt habe ich 115200 Baut und 5 Hz fest gespeichert.
Im Anschluss muss man dann das Nav-Module neu aufspielen. Einfach hier dem Weg "V2" folgen:
http://www.rcgroups.com/forums/showthread.php?t=1724694
Zudem habe ich noch was interessantes gefunden:
http://ukhas.org.uk/guides:ublox_psm
"CFG-NAV5
Dynamic Model '3' Pedestrian Small Deviation
This is possibly worth switching too on the way down or on the ground as it gives a much more accurate position and works below 9000 meters altitude and as long as the vertical velocity < 20m/s and horizontal velocity < 30m/s."
Somit sollte dieses Fußgänger Setting unter UBX->CFG->NAV5 also eventuell noch mehr Genauigkeit bringen. Und wir fliegen ja nicht schneller als 108 kmh bzw. steigen/sinken nicht mit mehr als 72 kmh
Hier wird diese Einstellung auch empfohlen:
http://code.google.com/p/ardupirates/wiki/UbloxGPSTutorial
Das könnt ihr ignorieren, da nur für alte sehr Firmware-Versionen
"2. Choose UBX=>CFG=>NAV - set the Dynamic Platform Model to use 3-Pedestrian. SEND
3. Choose UBX=>CFG=>NAV2- set the Dynamic Platform Model to use 3-Pedestrian. SEND"
Sebastian
ich habe mir nun an das CRIUS CN-06 (V1) ein EEPROM zum Speichern der Configdaten dran gelötet. Dazu habe ich dieses hier bei Conrad gekauft:
http://www.conrad.de/ce/de/product/...it-Organisation-4-K-x-8?queryFromSuggest=true
Wie es geht kann man hier sehen: http://www.pial.net/post/Crius-CN-06-GPS-v10-module-EEPROM-mod.aspx
Die Details zum EEPROM (PINs etc) stehen auf der Conrad-Seite.
Jetzt habe ich 115200 Baut und 5 Hz fest gespeichert.
Im Anschluss muss man dann das Nav-Module neu aufspielen. Einfach hier dem Weg "V2" folgen:
http://www.rcgroups.com/forums/showthread.php?t=1724694
Zudem habe ich noch was interessantes gefunden:
http://ukhas.org.uk/guides:ublox_psm
"CFG-NAV5
Dynamic Model '3' Pedestrian Small Deviation
This is possibly worth switching too on the way down or on the ground as it gives a much more accurate position and works below 9000 meters altitude and as long as the vertical velocity < 20m/s and horizontal velocity < 30m/s."
Somit sollte dieses Fußgänger Setting unter UBX->CFG->NAV5 also eventuell noch mehr Genauigkeit bringen. Und wir fliegen ja nicht schneller als 108 kmh bzw. steigen/sinken nicht mit mehr als 72 kmh
Hier wird diese Einstellung auch empfohlen:
http://code.google.com/p/ardupirates/wiki/UbloxGPSTutorial
Das könnt ihr ignorieren, da nur für alte sehr Firmware-Versionen
"2. Choose UBX=>CFG=>NAV - set the Dynamic Platform Model to use 3-Pedestrian. SEND
3. Choose UBX=>CFG=>NAV2- set the Dynamic Platform Model to use 3-Pedestrian. SEND"
Sebastian
Zuletzt bearbeitet:
Hallo Fat Tony:
Das NEO-6M GPS Modul hat standardmäßig einen Seriellen Anschluß, den kann man sicher anschließen. So habe ich es aber nicht gemacht.
Das I2C-GPS NAV Modul macht die Seriell zu I2C umwandlung. Wenn du auf das Modul auch die richtige Software aufspielst, macht es auch schon alle Berechnungen für Hold/Home/Waypoint und das entlastet den FC.
Das NEO-6M GPS Modul hat standardmäßig einen Seriellen Anschluß, den kann man sicher anschließen. So habe ich es aber nicht gemacht.
Das I2C-GPS NAV Modul macht die Seriell zu I2C umwandlung. Wenn du auf das Modul auch die richtige Software aufspielst, macht es auch schon alle Berechnungen für Hold/Home/Waypoint und das entlastet den FC.
Hi
Sorry wenn ich den Thread nochmal rauskrame aber;
Im Prinzip muss ich also 3-4 Dinge erledigen, um mein ganz normales GPS Modul in ein Top-Notch GPS zu verwandeln?
1: Original Antenne abklemmen oder ablöten
2: 35mm Antenne kaufen und montieren (Wo günstig kaufen? Kenne nur Flyduino für 20€)
3: Kupferschirmung kaufen / anfertigen lassen
4: Kupferschirmung an GND anschließen
Fertig? Schon habe ich ein deutlich besseres GPS?
Genauere Daten, besserer Empfang, schnellerer Fix?
Wie stark macht sich das beim GPS Flug, vor allem Loiter / Position Hold emerkbar?
LG
Sandro
Sorry wenn ich den Thread nochmal rauskrame aber;
Im Prinzip muss ich also 3-4 Dinge erledigen, um mein ganz normales GPS Modul in ein Top-Notch GPS zu verwandeln?
1: Original Antenne abklemmen oder ablöten
2: 35mm Antenne kaufen und montieren (Wo günstig kaufen? Kenne nur Flyduino für 20€)
3: Kupferschirmung kaufen / anfertigen lassen
4: Kupferschirmung an GND anschließen
Fertig? Schon habe ich ein deutlich besseres GPS?
Genauere Daten, besserer Empfang, schnellerer Fix?
Wie stark macht sich das beim GPS Flug, vor allem Loiter / Position Hold emerkbar?
LG
Sandro
Zuletzt bearbeitet:
Hi Leute.
Um mein GPS Signal nochmal deutlich zu verbessern habe ich die 35mm Antenne gekauft sowie das GPS Shield von Flyduino.
Dennoch habe ich eine Frage zur Verkabelung:
Gehe ich richtig davon aus, dass alle vierecke mit 5V GND vom GPS Modul verbunden werden müssen?

Die alte Antenne ist schonmal abgelötet, die neue wollte ich via Heißkleber oben anbringen.
LG
Sandro
Um mein GPS Signal nochmal deutlich zu verbessern habe ich die 35mm Antenne gekauft sowie das GPS Shield von Flyduino.
Dennoch habe ich eine Frage zur Verkabelung:
Gehe ich richtig davon aus, dass alle vierecke mit 5V GND vom GPS Modul verbunden werden müssen?
Die alte Antenne ist schonmal abgelötet, die neue wollte ich via Heißkleber oben anbringen.
LG
Sandro
Hallo Sandro,
es ist nur wichtig, dass der Shield irgendwo an GND ist denke ich. Kannst du mit einem Multimeter ja ganz leicht prüfen dann.
Mein Shield tut auch gut mit einer 20 mm Patch. Die Genauigkeit reicht mir so.
Allerdings habe ich beim Position Hold immer noch so ca. sekündliche Störungen drin. Der Kopter zuckt dann immer kurz, so als würde er dann stark korrigieren wollen. Ich habe das Problem schon öfter beschrieben, aber noch nie eine Antwort bekommen.
RTH klappt gar nicht wirklich. Trotz allen Einstellungen (cm/s, degrees, etc.) kricht er nur nach Hause bzw. verhungert unterwegs.
Wäre cool, wenn ihr das Verhalten eurer Kopter beim PH und RTH beschreiben würdet.
Grüße
Sebastian
es ist nur wichtig, dass der Shield irgendwo an GND ist denke ich. Kannst du mit einem Multimeter ja ganz leicht prüfen dann.
Mein Shield tut auch gut mit einer 20 mm Patch. Die Genauigkeit reicht mir so.
Allerdings habe ich beim Position Hold immer noch so ca. sekündliche Störungen drin. Der Kopter zuckt dann immer kurz, so als würde er dann stark korrigieren wollen. Ich habe das Problem schon öfter beschrieben, aber noch nie eine Antwort bekommen.
RTH klappt gar nicht wirklich. Trotz allen Einstellungen (cm/s, degrees, etc.) kricht er nur nach Hause bzw. verhungert unterwegs.
Wäre cool, wenn ihr das Verhalten eurer Kopter beim PH und RTH beschreiben würdet.
Grüße
Sebastian
Okay danke für die Info, um so besser wenn ein Pad reicht
Wenn der Platz reicht bringe ich auch meinen externen Mag überhalb dieser Schirmung an.
Ist die Abschirmwirkung noch höher wenn ich GND nicht vom GPS nehme sondern direkt vom LiPo?
Bei APM oder MultiWii?
MultiWii RTH schmeiße ich schon garnicht mehr an - Habe damit total schlechte Erfahrungen
Danke für die schnellen Tipps.
LG
Sandro
Wenn der Platz reicht bringe ich auch meinen externen Mag überhalb dieser Schirmung an.
Ist die Abschirmwirkung noch höher wenn ich GND nicht vom GPS nehme sondern direkt vom LiPo?
RTH klappt gar nicht wirklich. Trotz allen Einstellungen (cm/s, degrees, etc.)
MultiWii RTH schmeiße ich schon garnicht mehr an - Habe damit total schlechte Erfahrungen
Danke für die schnellen Tipps.
LG
Sandro
.
ich habe mich bisher immer geweigert eine Faltschachtel zu löten.
bei mir ist ein FR4-Schirmblech mit ca 65x65mm 0,5-0,8 dick, voll ausreichend.

eine grössere Antenne 35x35mm würde da natürlich noch ein mal den Störabstand verbessern.
(je grösser die Antenne desto besser das Signal, das wusste schon Marconi)
ich habe mich bisher immer geweigert eine Faltschachtel zu löten.
bei mir ist ein FR4-Schirmblech mit ca 65x65mm 0,5-0,8 dick, voll ausreichend.
eine grössere Antenne 35x35mm würde da natürlich noch ein mal den Störabstand verbessern.
(je grösser die Antenne desto besser das Signal, das wusste schon Marconi)

