
iNav
- Themenstarter talentfrei
- Beginndatum
Hallo Myheli. Richtig die Gui ist schon dafür gerüstet aber trotzdem wird der Kopter das noch nicht ausführen . Er wird nur Waypoints und RTH fliegen . Der letzte Schritt war glaube ich das Landen bei RTH .
Als nächstes sind hoffentlich die Flugzeuge nochmal an der Reihe mit Autostart und Autolandung ! Ich fändes es auf jeden fall cool aber Betatester für diese Funktion möchte ich nicht spielen 😂
Gruß Boris
Als nächstes sind hoffentlich die Flugzeuge nochmal an der Reihe mit Autostart und Autolandung ! Ich fändes es auf jeden fall cool aber Betatester für diese Funktion möchte ich nicht spielen 😂
Gruß Boris
Hallo Myheli. Richtig die Gui ist schon dafür gerüstet aber trotzdem wird der Kopter das noch nicht ausführen . Er wird nur Waypoints und RTH fliegen . Der letzte Schritt war glaube ich das Landen bei RTH .
Als nächstes sind hoffentlich die Flugzeuge nochmal an der Reihe mit Autostart und Autolandung ! Ich fändes es auf jeden fall cool aber Betatester für diese Funktion möchte ich nicht spielen [emoji23]
Gruß Boris
Als nächstes sind hoffentlich die Flugzeuge nochmal an der Reihe mit Autostart und Autolandung ! Ich fändes es auf jeden fall cool aber Betatester für diese Funktion möchte ich nicht spielen [emoji23]
Gruß Boris
Landen hat übrigens gut funktioniert mit der "1".
Grüße Günter
Ok, hab ich mir gedacht.
Landen hat übrigens gut funktioniert mit der "1".
Grüße Günter
Landen hat übrigens gut funktioniert mit der "1".
Grüße Günter
https://youtu.be/D_AsgPY0mig
Gruß Boris
Also wenn du den RTH an der funke wählst macht er Quasie das selbe . Hatte das mal in nem Video festgehalten .
https://youtu.be/D_AsgPY0mig
Gruß Boris
https://youtu.be/D_AsgPY0mig
Gruß Boris
Und das tut er auch 1A!
Bei besserem Wetter werd ich dann Mal ein Video machen.
Grüße Günter
Wenn EZ GUI nicht mit dem Copter verbunden ist, bekomme ich manchmal diese Auswahl mit jede Menge Möglichkeiten (siehe Bild)
Ist die EZ GUI mit dem Copter verbunden, sind alle Felder leer außer Waypoint und RTH ?!

Ist die EZ GUI mit dem Copter verbunden, sind alle Felder leer außer Waypoint und RTH ?!
Die komplette Auswahl geht mit MultiWii 2.4, wofür die EZ GUI ursprüglich gemacht wurde.
Kenne nur Naze32, SP Racing und Kiss.
Fliege sonst nur 3D Quads
")
https://youtu.be/CGe6-qc0UtQ
Zuletzt bearbeitet:
Multiwii ist der Ursprung für CF u.s.w , noch mit 8 Bit, 16 MHz CPU
Cleanflight
Cleanflight can be used on multirotor aircraft and fixed-wing aircraft, it supports a variety for shapes and motor counts, not limited to
quadcopters, hexacopters, octocopters, tricopters and planes. Cleanflight is Open-Source flight controller software which is 32-bit version of the original 8-bit MultiWii code.
Cleanflight can be used on multirotor aircraft and fixed-wing aircraft, it supports a variety for shapes and motor counts, not limited to
quadcopters, hexacopters, octocopters, tricopters and planes. Cleanflight is Open-Source flight controller software which is 32-bit version of the original 8-bit MultiWii code.
Ja schick ich will auch auf dem kopf fliegen 😀!!
Gruß Boris
Gruß Boris
Ist nicht besonders aber OK.
https://youtu.be/Gr0cO7Ppwak
Vor meiner Quad Zeit. Bin die letzten Jahre Helis geflogen.
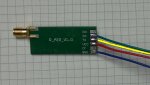
433MHz Data
Hallo,
will gerade die Datenübertragung via 433MHz Modul ins System integrieren. Als Groundstation hab ich ein relativ altes Archos Tablet. Die Apps "EZ-GUI" ist installiert. Das Modul am Copter hab ich an die 2.54Pins UART 1 angesteckt. Es wird wohl eine Verbindung aufgebaut, es kommt jedoch die Fehlermedung: " keine Daten empfangen"
Hat jemand eine Idee was da noch nicht paßt?
Mit Blutooth hat die Verbindung gefunzt.
Hallo,
will gerade die Datenübertragung via 433MHz Modul ins System integrieren. Als Groundstation hab ich ein relativ altes Archos Tablet. Die Apps "EZ-GUI" ist installiert. Das Modul am Copter hab ich an die 2.54Pins UART 1 angesteckt. Es wird wohl eine Verbindung aufgebaut, es kommt jedoch die Fehlermedung: " keine Daten empfangen"
Hat jemand eine Idee was da noch nicht paßt?
Mit Blutooth hat die Verbindung gefunzt.
Anhänge
-
 287,8 KB Aufrufe: 17
287,8 KB Aufrufe: 17 -
 303,6 KB Aufrufe: 18
303,6 KB Aufrufe: 18
Zuletzt bearbeitet:

