
Hi zusammen,
um nochmal auf die Umsetzung von Holger zurück zu kommen, hatte ja zeitgleich, bzw. ein paar Tage vorher schon mit Rangarid darüber gesprochen und eine ähliche Lösung. Würde gerne mal von euch die Meinung hören!
Umgesetzt wurde das Ganze vorerst so:

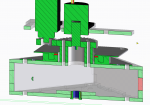

Hierzu hatte ich folgende Teile vorgesehen:
Der Flansch in der Mitte könnte dafür wegfallen, somit hätte man in der Mitte auch etwas mehr Platz und könnte, je nach Stecker unten am Schleifring, den Schleifring komplett entnehmen. Dies würde die Wartberkeit erhöhen!
Allerdings haben wir schnell festgestellt, dass die Versandkosten bei ServoCity mehr als das dreifache des Warenwertes darstellt. Distriburoren in der EU führen die benötigten Teile leider nicht.
Eine Option wäre, den Hub und die Zahnräder zu drucken, da wollten wir aber eigentlich drauf verzichten, damit wir möglichst wenig Fertigungsschritte haben. So wäre wieder ein 3D Drucker notwendig...
Eine weite Möglichkeit wäre, den Hub in mehrere Schichten zu teilen und aus dem Gehäusematerial lasern zu lassen. Das würde relativ entspannt möglich sein, allerdings können wir die Zahnräder nicht aus Acryl fertigen lassen, da Acryl zu spröde dafür ist. Hier wäre die Frage, ob ihr Materialien kennt, die geeigneter wären (Materialstärke zw. 3 und 5mm).
Habt ihr noch andere Ideen?
Wenn dieses Detail der Zahnradaufnahme geklärt ist, würde ich einen weiteren Punkt am Tracker verbessern: TILT-Bügel-Aufnahme. Allerdings sind das alles nur kleinere Verbesserungen, die jetztige Version funktioniert mechanisch ja schon recht gut...")
Schöne Grüße aus dem Sauerland!
Chriss
P.S.: @Holger: grade nochmall das Innenmaß vom unteren Gehäuse gemessen: lichte Höhe 25mm...
um nochmal auf die Umsetzung von Holger zurück zu kommen, hatte ja zeitgleich, bzw. ein paar Tage vorher schon mit Rangarid darüber gesprochen und eine ähliche Lösung. Würde gerne mal von euch die Meinung hören!
Umgesetzt wurde das Ganze vorerst so:
Hierzu hatte ich folgende Teile vorgesehen:
- großes Zahnrad (RHA32-26-40; $4,20)
- HUB (545384 & 545372; $1,59 & &0,99)
- Servo-Zahnrad (RSA32-2HS-20; $4,20)
Der Flansch in der Mitte könnte dafür wegfallen, somit hätte man in der Mitte auch etwas mehr Platz und könnte, je nach Stecker unten am Schleifring, den Schleifring komplett entnehmen. Dies würde die Wartberkeit erhöhen!
Allerdings haben wir schnell festgestellt, dass die Versandkosten bei ServoCity mehr als das dreifache des Warenwertes darstellt. Distriburoren in der EU führen die benötigten Teile leider nicht.
Eine Option wäre, den Hub und die Zahnräder zu drucken, da wollten wir aber eigentlich drauf verzichten, damit wir möglichst wenig Fertigungsschritte haben. So wäre wieder ein 3D Drucker notwendig...
Eine weite Möglichkeit wäre, den Hub in mehrere Schichten zu teilen und aus dem Gehäusematerial lasern zu lassen. Das würde relativ entspannt möglich sein, allerdings können wir die Zahnräder nicht aus Acryl fertigen lassen, da Acryl zu spröde dafür ist. Hier wäre die Frage, ob ihr Materialien kennt, die geeigneter wären (Materialstärke zw. 3 und 5mm).
Habt ihr noch andere Ideen?
Wenn dieses Detail der Zahnradaufnahme geklärt ist, würde ich einen weiteren Punkt am Tracker verbessern: TILT-Bügel-Aufnahme. Allerdings sind das alles nur kleinere Verbesserungen, die jetztige Version funktioniert mechanisch ja schon recht gut...
Schöne Grüße aus dem Sauerland!
Chriss
P.S.: @Holger: grade nochmall das Innenmaß vom unteren Gehäuse gemessen: lichte Höhe 25mm...
Zuletzt bearbeitet:




