
open360tracker - Der Community Antennentracker Made in Germany
- Themenstarter Rangarid
- Beginndatum
Ich werde noch mal die Verbindung von der Taranis zum Tracker-Arduino prüfen, nicht, dass da was hakt, wie z.B. das Kabel oder der Schleifring.
Wenn ich den UART-USB-Wandler an Stelle des Arduinos im Tracker über die ganzen Kabel usw. an die Taranis anklemme, dann bekomme ich zumindest vernünftig aussehende Datenpakete rein (0x7E.....), auch wenn ich die Daten so ohne Weiteres nicht auf inhaltliche Plausibilität prüfen kann (Glitches der Werte würde ich im Terminal-Programm z.B. wohl nicht erkennen). Auf dem Ossi sieht man, dass die steigenden Flanken zwar etwas verrundet sind, ich denke aber, dass das gerade an der HW-UART keine Probleme machen dürfte.
Du musst übrigens nicht fliegen, um zu sehen ob der Tracker richtig trackt. Es reicht, wenn du im Umkreis von 20-50m um den Tracker herumgehst, dann siehst du ja ob er auf dich zeigt oder nicht.
Da ja anscheinend alles funktioniert würde ich dir einfach mal ein anderes GPS empfehlen. Der Simulator hat ja auch richtig funktioniert. Wenn du ein GPS benutzt könntest du mal folgende Einstellung testen:
Anhang anzeigen 38400_mfd_config_2.txt
Einfach im U-Center per GNSS-Config auf das GPS schieben. Schreibt Standardeinstellungen für 38400 mit 5hz. Ist soweit ich weiß kompatibel zu allen Ublox 6.
Du benutzt das GPS ja mit dem Autopilot im Y-Verbund oder? Versuch hier auch einfach mal Ohne Y-Kabel das GPS zu benutzen. Vielleicht funkt der AP ja doch irgendwie rein...
Da ja anscheinend alles funktioniert würde ich dir einfach mal ein anderes GPS empfehlen. Der Simulator hat ja auch richtig funktioniert. Wenn du ein GPS benutzt könntest du mal folgende Einstellung testen:
Anhang anzeigen 38400_mfd_config_2.txt
Einfach im U-Center per GNSS-Config auf das GPS schieben. Schreibt Standardeinstellungen für 38400 mit 5hz. Ist soweit ich weiß kompatibel zu allen Ublox 6.
Du benutzt das GPS ja mit dem Autopilot im Y-Verbund oder? Versuch hier auch einfach mal Ohne Y-Kabel das GPS zu benutzen. Vielleicht funkt der AP ja doch irgendwie rein...
Du musst übrigens nicht fliegen, um zu sehen ob der Tracker richtig trackt. Es reicht, wenn du im Umkreis von 20-50m um den Tracker herumgehst, dann siehst du ja ob er auf dich zeigt oder nicht.
Da ja anscheinend alles funktioniert würde ich dir einfach mal ein anderes GPS empfehlen. Der Simulator hat ja auch richtig funktioniert. Wenn du ein GPS benutzt könntest du mal folgende Einstellung testen:
Anhang anzeigen 134562
Einfach im U-Center per GNSS-Config auf das GPS schieben. Schreibt Standardeinstellungen für 38400 mit 5hz. Ist soweit ich weiß kompatibel zu allen Ublox 6.
Du benutzt das GPS ja mit dem Autopilot im Y-Verbund oder? Versuch hier auch einfach mal Ohne Y-Kabel das GPS zu benutzen. Vielleicht funkt der AP ja doch irgendwie rein...
Da ja anscheinend alles funktioniert würde ich dir einfach mal ein anderes GPS empfehlen. Der Simulator hat ja auch richtig funktioniert. Wenn du ein GPS benutzt könntest du mal folgende Einstellung testen:
Anhang anzeigen 134562
Einfach im U-Center per GNSS-Config auf das GPS schieben. Schreibt Standardeinstellungen für 38400 mit 5hz. Ist soweit ich weiß kompatibel zu allen Ublox 6.
Du benutzt das GPS ja mit dem Autopilot im Y-Verbund oder? Versuch hier auch einfach mal Ohne Y-Kabel das GPS zu benutzen. Vielleicht funkt der AP ja doch irgendwie rein...
Ich muss unbedingt mal mitloggen, was unten ankommt oder eine Kamera auf das Tracker-Display richten. Nützt ja alles nichts.
Stimmt, mit AP im Y-Verbund. Dazwischen noch ein Pegelwandler, da das GPS nur 3V ausgibt und die zudem noch vom ESD-Schutz im AP verschliffen werden.
Das GPS (UBX 5, meine ich) läuft mit 5Hz und müsste GPGGA, GPGSA, GPRMC und GPVTG ausgeben. Das ist aber der nächste Punkt, den ch prüfen werde.
Ansonsten sollte es ja auch mit dem originalen FrSky-GPS gehen, oder? Dann nehm ich das einfach mal in die Hand und laufe um den Tracker rum...
Ich habe zum testen des Tackers auch das originale FRSKY GPS genutzt.
Bei mir ging es.
Manchmal reagiert es erst nach einer Weile. Schaut sozusagen ne Weile an die alte Stelle (10sec.) dann macht er los. Konnte bis jetzt aber nur im Nahbereich (50m) testen.
Was mir noch aufgefallen ist, ist dass der Tracker immer waagerecht stehen sollte. Sobald er ein bisschen schief steht, zieht er nicht mehr richtig. Ist das bei euch auch so?
Bei mir ging es.
Manchmal reagiert es erst nach einer Weile. Schaut sozusagen ne Weile an die alte Stelle (10sec.) dann macht er los. Konnte bis jetzt aber nur im Nahbereich (50m) testen.
Was mir noch aufgefallen ist, ist dass der Tracker immer waagerecht stehen sollte. Sobald er ein bisschen schief steht, zieht er nicht mehr richtig. Ist das bei euch auch so?
Zuletzt bearbeitet:
So, next Step!
Heute wollte ich es zunächst mit dem OE GPS testen, das scheint aber eine der letzten "Landungen" nicht überlebt zu haben. Also hab ich doch wieder den Tek durch die Gegend getragen.
Was mir auffiel ist, dass die Anzeige in der Taranis sich in einem plausiblen Zeitraum bzw. vermutlich in Echtzeit ändert (konnte ja nur schnell den Flieger ein wenig vom Sender wegtragen, zurücklaufen und die Anzeige mit der vorherigen vergleichen). Auf dem Tracker-Display bleibt sie aber z.T. "ewig" unverändert.
Daraufhin habe ich nochmal mit dem Laptop mitgeloggt. Wie ich das vernünftig auswerten kann weiß ich zwar noch nicht, aber ich hab das Gefühl, dass da was nicht stimmt. Hier mal ein kurzer Ausschnitt:
Das Startbyte 7E ist gut zu erkennen, aber was sind das danach für IDs? E4? 83? Was soll das für ein Sensor sein?! Kann jemand bestätigen, dass das Datenmüll ist? Dann würde ich als nächstes mal das Kabel gegen was anderes tauschen, ist derzeit geschirmtes AV-Kabel.
Ergänzung:
Ich hab mal ein bisschen mit Excel gespielt und einen Abschnitt aus der Mitte meines Logs anaylsiert:
Meine Vermutung, dass die Daten LSB-first übertragen werden ist richtig, oder? Andernfalls würde sich die IDs nicht so schön passend ergeben.
Wenn ich dann die 4 Bytes mit den Sensorwerten in eine Dezimalzahl umwandle, dann kommt sowas dabei raus:
Value-ID Value
0x0800 30916534
0x0800 5360
0x0850 255
0x0850 0
0x0820 5360
0x0830 5423
0x0850 255
0x0800 30916528
0x0830 5443
0x0840 24030
0x0800 30916526
0x0800 2151806863
0x0830 5520
0x0850 255
0x0800 2151806859
0x0820 5350
0x0850 255
0x0850 0
0x0800 2151806852
0x0830 5384
0x0850 0
0x0800 30916520
0x0830 4918
0x0840 23900
0x0850 0
...
Mich wundert jetzt z.B. der enorme Sprung auf 0x0800 (GPS_LONG_LATI_FIRST_ID)...müsste es nicht auch eine 0x080F geben?
Achso, der Tracker stand an 51.527537, 7.205489.
Heute wollte ich es zunächst mit dem OE GPS testen, das scheint aber eine der letzten "Landungen" nicht überlebt zu haben. Also hab ich doch wieder den Tek durch die Gegend getragen.
Was mir auffiel ist, dass die Anzeige in der Taranis sich in einem plausiblen Zeitraum bzw. vermutlich in Echtzeit ändert (konnte ja nur schnell den Flieger ein wenig vom Sender wegtragen, zurücklaufen und die Anzeige mit der vorherigen vergleichen). Auf dem Tracker-Display bleibt sie aber z.T. "ewig" unverändert.
Daraufhin habe ich nochmal mit dem Laptop mitgeloggt. Wie ich das vernünftig auswerten kann weiß ich zwar noch nicht, aber ich hab das Gefühl, dass da was nicht stimmt. Hier mal ein kurzer Ausschnitt:
Code:
7E E4 10 00 05 00 00 00 00 EA
7E BA
7E 83 10 40 08 C8 5F 00 00 7F
7E 98 10 05 F1 00 33 06 36 89
7E 98 10 01 F1 59 00 11 36 5C
7E 98 10 04 F1 B0 00 11 36 02
7E E4 10 00 04 00 00 00 00 EB
7E 83 10 50 08 FF 00 00 00 97
7E E4 10 10 04 7A 00 00 00 61
7E 83 10 50 08 00 00 00 00 97
7E E4 10 00 05 00 00 00 00 EA
7E 1B
7E 83 10 00 08 BC BF D7 01 92
7E 00
7E A1
7E E4 10 00 04 00 00 00 00 EB
7E 83 10 00 08 BC F7 41 80 71
7E E4 10 10 04 7A 00 00 00 61
7E 83 10 20 08 04 15 00 00 AE
7E E4 10 00 05 00 00 00 00 EA
7E 83 10 30 08 DE 15 00 00 C3
7E E4 10 00 04 00 00 00 00 EBErgänzung:
Ich hab mal ein bisschen mit Excel gespielt und einen Abschnitt aus der Mitte meines Logs anaylsiert:
Meine Vermutung, dass die Daten LSB-first übertragen werden ist richtig, oder? Andernfalls würde sich die IDs nicht so schön passend ergeben.
Wenn ich dann die 4 Bytes mit den Sensorwerten in eine Dezimalzahl umwandle, dann kommt sowas dabei raus:
Value-ID Value
0x0800 30916534
0x0800 5360
0x0850 255
0x0850 0
0x0820 5360
0x0830 5423
0x0850 255
0x0800 30916528
0x0830 5443
0x0840 24030
0x0800 30916526
0x0800 2151806863
0x0830 5520
0x0850 255
0x0800 2151806859
0x0820 5350
0x0850 255
0x0850 0
0x0800 2151806852
0x0830 5384
0x0850 0
0x0800 30916520
0x0830 4918
0x0840 23900
0x0850 0
...
Mich wundert jetzt z.B. der enorme Sprung auf 0x0800 (GPS_LONG_LATI_FIRST_ID)...müsste es nicht auch eine 0x080F geben?
Achso, der Tracker stand an 51.527537, 7.205489.
Zuletzt bearbeitet:
Gestern mal wieder getestet. Ich schätze, am Tracker liegt/lag es nicht, bzw. nicht ausschließlich. Wenn, dann ist es eine Kombination aus meinem GPS-Modul, dem DIY-FrSky-GPS und dem Tracker.
Ich hatte noch ein weiteres DIY-GPS mit einem anderen GPS-Modul aufgebaut, zu Vergleichszwecken habe ich es mal damit probiert.
Das Ergebnis war zunächst sehr ähnich bis identisch, der Tracker bewegte sich hin und wieder aber ein Zusammenhang zu meiner Position war nicht erkennbar.
Also habe ich mal die Übertragungsfrequenz von 3Hz auf 2Hz reduziert und es wurde merklich besser! Hier fiel mir aber ein starker "Drift" auf, die angezeigte Distanz wurde immer größer, obwohl das Target nicht bewegt wurde.
Im nächsten Schritt auf 1Hz runter. Drift nachwievor vorhanden aber langsamer. Dennoch nicht brauchbar. Davon ab bewegte sich der Tracker wie auch auf 2Hz ganz ordentlich, verfehlte nur nach und nach das Ziel auf Grund des Drifts.
Weiterer Versuch mit 4 Hz, weil ich den Verdacht hätte, dass das DIY-GPS vielleicht seine Daten nicht schnell genug losbekommt. Ging ebenfalls, bekam aber ordentliche Latenzen zwischen Bewegung des Targets und Nachführung der Antenne.
Am Ende bin ich wieder auf 3Hz zurück und das scheint der beste Kompromiss zu sein - JETZT geht es?!
Also mal den Teksumo hergenommen, mit dem ich bislang getestet hatte. Hier das DIY-GPS auch einfach nochmal neu geflasht und nun scheint das da auch zu funktionieren!?
Die Software(version) war immer die gleiche, da bin ich mir sehr sicher. Habe auf dem Laptop nur die aktuelle Variante gespeichert.
Verrückte Welt. Eigentlich bin ich mir ziemlich sicher, dass da Magie im Spiel ist....
Ich hatte noch ein weiteres DIY-GPS mit einem anderen GPS-Modul aufgebaut, zu Vergleichszwecken habe ich es mal damit probiert.
Das Ergebnis war zunächst sehr ähnich bis identisch, der Tracker bewegte sich hin und wieder aber ein Zusammenhang zu meiner Position war nicht erkennbar.
Also habe ich mal die Übertragungsfrequenz von 3Hz auf 2Hz reduziert und es wurde merklich besser! Hier fiel mir aber ein starker "Drift" auf, die angezeigte Distanz wurde immer größer, obwohl das Target nicht bewegt wurde.
Im nächsten Schritt auf 1Hz runter. Drift nachwievor vorhanden aber langsamer. Dennoch nicht brauchbar. Davon ab bewegte sich der Tracker wie auch auf 2Hz ganz ordentlich, verfehlte nur nach und nach das Ziel auf Grund des Drifts.
Weiterer Versuch mit 4 Hz, weil ich den Verdacht hätte, dass das DIY-GPS vielleicht seine Daten nicht schnell genug losbekommt. Ging ebenfalls, bekam aber ordentliche Latenzen zwischen Bewegung des Targets und Nachführung der Antenne.
Am Ende bin ich wieder auf 3Hz zurück und das scheint der beste Kompromiss zu sein - JETZT geht es?!
Also mal den Teksumo hergenommen, mit dem ich bislang getestet hatte. Hier das DIY-GPS auch einfach nochmal neu geflasht und nun scheint das da auch zu funktionieren!?
Die Software(version) war immer die gleiche, da bin ich mir sehr sicher. Habe auf dem Laptop nur die aktuelle Variante gespeichert.
Verrückte Welt. Eigentlich bin ich mir ziemlich sicher, dass da Magie im Spiel ist....
Ich habe das locale GPS nun mal auf 38400 und 1Hz gestellt und konnte gestern mal wieder den Tracker testen.
Mit dieser Einstellung geht er ganz gut und verfolgt mein Copter auch schön flüssig.
Was er aber nicht mag, ist im Betrieb einfach das Telemetriekabel zwischen Tracker und Taranis zu ziehen und wieder einstecken. Da findet erst sich auch nach paar Minuten suchen nicht wieder. Das einzige was da hilft ist den Tracker neu zu starten. Dazu muss ich das Telemetriekabel ziehen und den Tracker aus und wieder einschalten und warten bis er die Daten vom localen GPS bekommen hat. Danach kann ich das Telemetriekabel wieder einstecken und der Tracker arbeitet, sobald er die Daten von der Taranis "versteht".
Bin jetzt eigentlich ganz zufrieden mit dem Tracker. (Ich muss ja das Kabel nicht ziehen)
Ich werde zur Sicherheit als nächstes noch ein Diversity einbauen.
Mit dieser Einstellung geht er ganz gut und verfolgt mein Copter auch schön flüssig.
Was er aber nicht mag, ist im Betrieb einfach das Telemetriekabel zwischen Tracker und Taranis zu ziehen und wieder einstecken. Da findet erst sich auch nach paar Minuten suchen nicht wieder. Das einzige was da hilft ist den Tracker neu zu starten. Dazu muss ich das Telemetriekabel ziehen und den Tracker aus und wieder einschalten und warten bis er die Daten vom localen GPS bekommen hat. Danach kann ich das Telemetriekabel wieder einstecken und der Tracker arbeitet, sobald er die Daten von der Taranis "versteht".
Bin jetzt eigentlich ganz zufrieden mit dem Tracker. (Ich muss ja das Kabel nicht ziehen)
Ich werde zur Sicherheit als nächstes noch ein Diversity einbauen.
Das mit dem Kabel kann ich bestätigen! Wäre schön, wenn das ausgemerzt werden könnte - nicht alle können beim Start sitzen bleiben. Mein Kabellänge zwischen Taranis und Tracker betrug 5m, was den Handstart des Nuris ohne Abstecken des Kabels unmöglich machte.
Nun bin ich mit der X9E zwar per Bluetooth verbunden, aber was passiert, wenn das Signal mal abreisst?
Nun bin ich mit der X9E zwar per Bluetooth verbunden, aber was passiert, wenn das Signal mal abreisst?
Falls noch jemand Ersatzquellen für Servo sucht, habe eben mal den Conrad RS2 MG-BB getestet (Servo alleine)
Immer auf 10 Umdrehungen gemessen
Mindestgeschwindigkeit 66 Sek
50% 14 Sek
100% 11 Sek
Ist im Hohen Drehzahlbereich nicht sehr unterschiedlich, denke am meisten wird der aber im Unteren Drehzahlbereich genutzt werden
Manko ist, der Stift sitzt so fest, das der abgefeilt werden muss, da der auf Metallzahnrad sitzt, war nicht zu lösen
Umbau mit 2 Standard Widerständen stellt kein Problem da
Immer auf 10 Umdrehungen gemessen
Mindestgeschwindigkeit 66 Sek
50% 14 Sek
100% 11 Sek
Ist im Hohen Drehzahlbereich nicht sehr unterschiedlich, denke am meisten wird der aber im Unteren Drehzahlbereich genutzt werden
Manko ist, der Stift sitzt so fest, das der abgefeilt werden muss, da der auf Metallzahnrad sitzt, war nicht zu lösen
Umbau mit 2 Standard Widerständen stellt kein Problem da
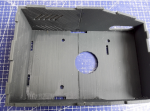
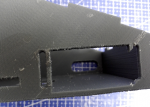
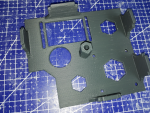
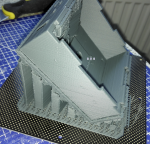
Dank Chriss, der mir freundlicherweise die STL zum Testen gegeben hat, hier ein paar Bilder.. der Druck mit ABS war mit meinem Up Mini wirklich eine Herausforderung ") Aber es hat geklappt und ist sicher eine Alternative zum Fräßen.
Aber es hat geklappt und ist sicher eine Alternative zum Fräßen.
Die großen Flächen sind ziemlich Warp-gefährdet, daher habe ich diese Teile diagonal gedreht. Der Up Mini slicer fügt automatisch genug support ein, nach den ersten Fehlversuchen mit zu großer Auflagefläche gab es auch kaum noch Ausschuss.
Das größte Teil habe ich mit netfab geteilt und danach mit Aceton zusammengeklabt. Druckzeiten bei den größeren Teilen jeweils 3-4 Stunden, insgesamt war ich einige Tage beschäftigt.
Aber es hat geklappt und ist sicher eine Alternative zum Fräßen.Die großen Flächen sind ziemlich Warp-gefährdet, daher habe ich diese Teile diagonal gedreht. Der Up Mini slicer fügt automatisch genug support ein, nach den ersten Fehlversuchen mit zu großer Auflagefläche gab es auch kaum noch Ausschuss.
Das größte Teil habe ich mit netfab geteilt und danach mit Aceton zusammengeklabt. Druckzeiten bei den größeren Teilen jeweils 3-4 Stunden, insgesamt war ich einige Tage beschäftigt.
Mein Tracker hat am Samstag übrigens erstmalig gut funktioniert!
Probleme machte ja das Trennen der seriellen Verbindung zur Taranis, um Bewegungsfreiheit für einen Handstart zu haben.
Abhilfe brachte Bluetooth, was aber im ersten echten Feldtest nicht wollte. Nun ging es plötzlich und ich konnte ein ganz schönes Stück weiter weg als normal
Probleme machte ja das Trennen der seriellen Verbindung zur Taranis, um Bewegungsfreiheit für einen Handstart zu haben.
Abhilfe brachte Bluetooth, was aber im ersten echten Feldtest nicht wollte. Nun ging es plötzlich und ich konnte ein ganz schönes Stück weiter weg als normal

