
Logdaten...
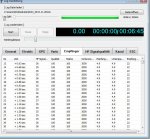
Üblicherweise lese ich die Logdaten mit dem Data Explorer aus. Mit den durch openXsensor erzeugten Daten geht das nicht, es werden nur die Empfängerdaten visualisiert. Was auffällt ist die seltsame Speicherrate der Daten, die man mit der Graupnersoftware in Tabellenform immerhin ansehen kann.
Hier mal Bilder aus einer Datei:
Empfänger:
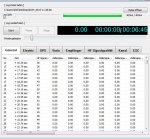
GAM oXs:
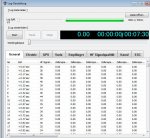
GPS oXs:

Zum Vergleich ein Bild mit UniSens-E Daten:
Woran liegt das? Wie sehen eure Aufzeichnungen aus?
Üblicherweise lese ich die Logdaten mit dem Data Explorer aus. Mit den durch openXsensor erzeugten Daten geht das nicht, es werden nur die Empfängerdaten visualisiert. Was auffällt ist die seltsame Speicherrate der Daten, die man mit der Graupnersoftware in Tabellenform immerhin ansehen kann.
Hier mal Bilder aus einer Datei:
Empfänger:
GAM oXs:
GPS oXs:
Zum Vergleich ein Bild mit UniSens-E Daten:
Woran liegt das? Wie sehen eure Aufzeichnungen aus?




") ?
?


