
Pixhawk Autopilot - PX4 all in one.
- Themenstarter Nosferatu
- Beginndatum
") Dann kauf dir eine andere Badehose, dann klappt es vielleicht auch mit dem Schwimmen
Dann kauf dir eine andere Badehose, dann klappt es vielleicht auch mit dem Schwimmen
Dann würde ich gerne bei Dir in die Lehre gehen!
Ich vermute aber, dass es bei dem Pixkawk-System Qualitätsprobleme gibt.
Ich habe jetzt 2 Steuerungen von verschiedenen Lieferanten hier.
Jede zeigt im Praxistest verschiedene (völlig abweichende) Fehler.
Ein Exemplar zeigt schon beim Start unbrauchbares Verhalten (Rotation um die Yaw-Achse).
Das Zweite lässt fast perfekte Flüge zu, bis es nach 5 Minuten plötzlich vom Steuer-Kurs abkommt.
Ich vermute aber, dass es bei dem Pixkawk-System Qualitätsprobleme gibt.
Ich habe jetzt 2 Steuerungen von verschiedenen Lieferanten hier.
Jede zeigt im Praxistest verschiedene (völlig abweichende) Fehler.
Ein Exemplar zeigt schon beim Start unbrauchbares Verhalten (Rotation um die Yaw-Achse).
Das Zweite lässt fast perfekte Flüge zu, bis es nach 5 Minuten plötzlich vom Steuer-Kurs abkommt.
Aller guten Dinge sind drei:
diesmal von:
http://www.uav-store.de/autopilot-1/pixhawk/
Hier war die Verwunderung über die Verpackung schon groß!
Sie ist völlig anders als bei den anderen zwei Lieferanten, wobei die von RCmaster eher eine Bulk-Packung war. (Bilder folgen hierzu noch)
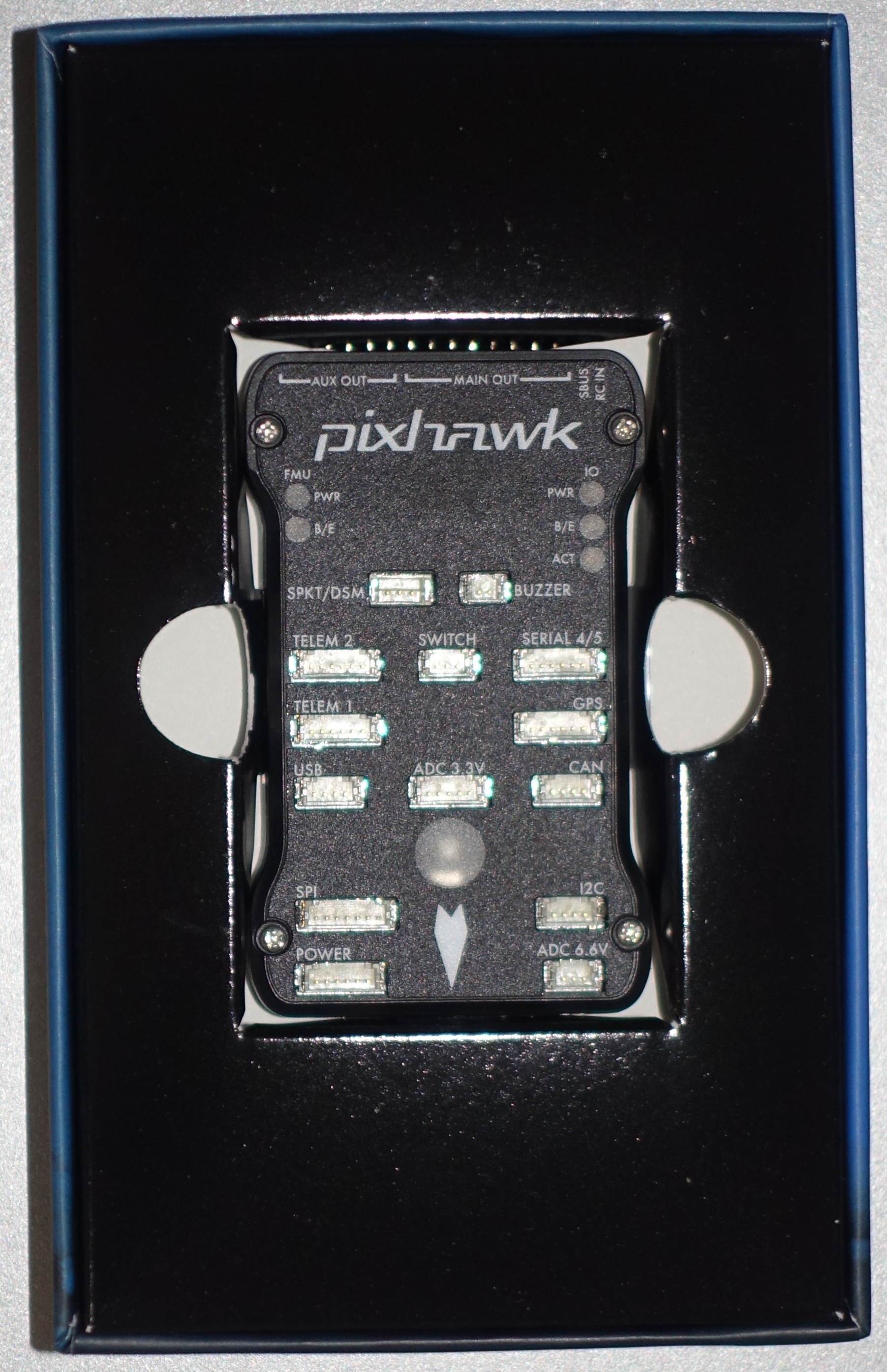
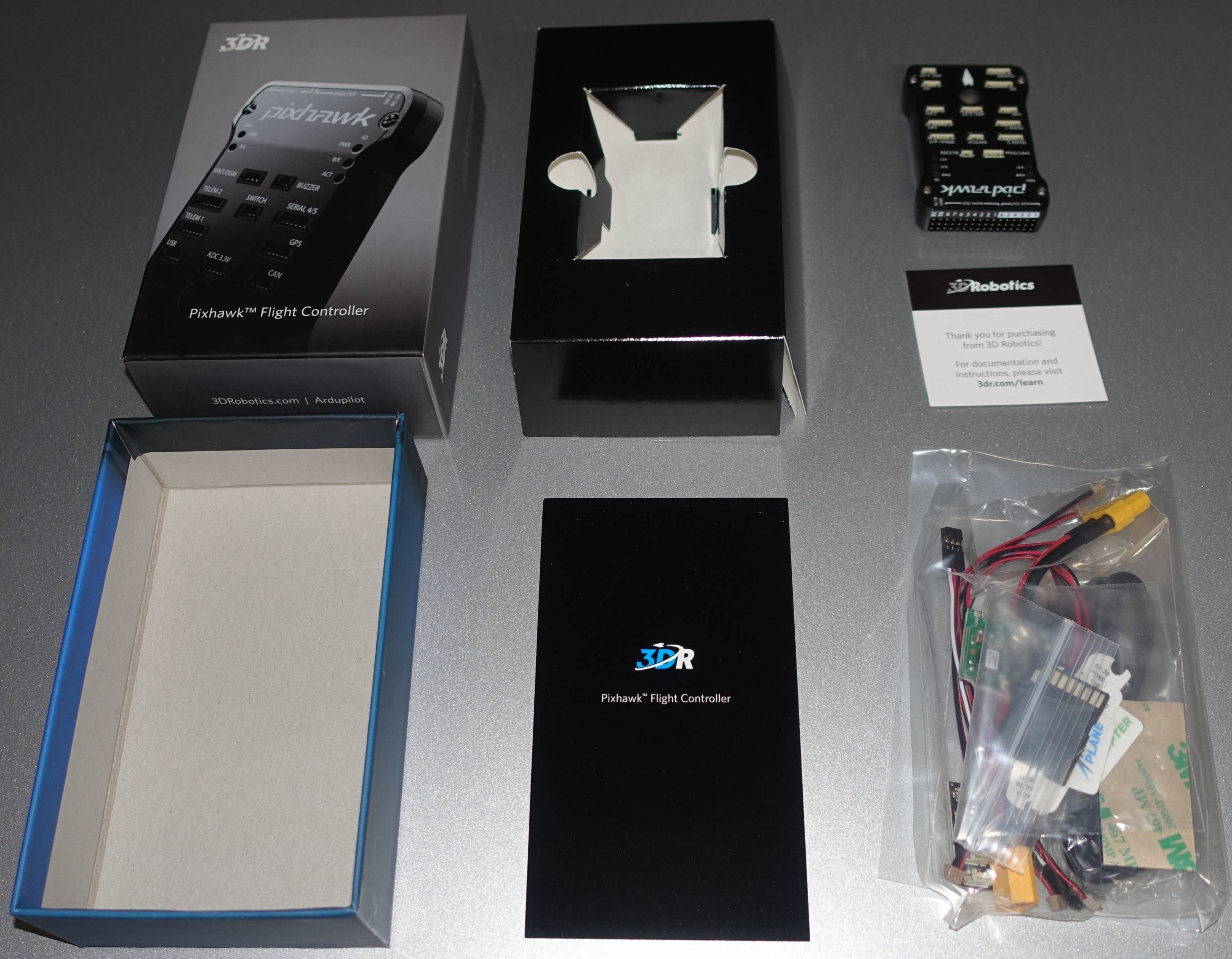
Spätestens das folgende Bild macht nachdenklich, ob die beiden ersten Pixhawks vielleicht doch nur Clone sind.

Diese Label fehlen auf den anderen Beiden!
diesmal von:
http://www.uav-store.de/autopilot-1/pixhawk/
Hier war die Verwunderung über die Verpackung schon groß!
Sie ist völlig anders als bei den anderen zwei Lieferanten, wobei die von RCmaster eher eine Bulk-Packung war. (Bilder folgen hierzu noch)
Spätestens das folgende Bild macht nachdenklich, ob die beiden ersten Pixhawks vielleicht doch nur Clone sind.
Diese Label fehlen auf den anderen Beiden!
Zuletzt bearbeitet:
Ich grab mal den Thread wieder aus, meine Suche quer durch das Internet hat mir nicht viel gebracht...
Mein PIX4 Klon ist auf einem Tarot 680, Einzelheiten sind jetzt unwichtig..
Als RC habe ich eine MC 32, am Tarot ist ein GR16.
Eingentlich habe ich mich für Pixhawk entschieden weil es laut einigen Seiten mit der HOTT Telemetrie zusammen arbeiten soll.
Da unter APM angeblich das Protokoll nicht integriert ist habe ich die PX4 Stack Firmware geladen, sollte ja laut Aussagen gehen.
Eigentlich sollte man unter etc/extras eine Datei haben/anlegen (extras.txt) die beim Booten mit abgearbeitet wird, dort trägt man den HOTT Telemetrie Start ein.
Im QGC gibt es ein Widget mit dem man Dateien rauf und runterladen kann, ein Upload scheitert aber bei mir mit einer NAK Meldung, Download geht einwandfrei.
Dann habe ich versucht mit Hilfe der Konsole zumindest mal HOTT Telemetrie zu starten, ging auch nicht, (command not found)
Woanders habe ich irgendwo gelesen das man für die Hott Telemetrie sich mittlerweile eine eigene Firmware basteln muss?
Hat da jemand von euch die Telemetrie am laufen?
Angeschlossen ist alles angeblich richtig.
Ferner komme ich nicht klar mit der Zuweisung der Flugzustände, Schalter wären genug da, aber in der Konfiguration soll alles über einen Kanal gehen?
Das man versch. Kanäle zuweisen kann habe ich gesehen, aber sobald ich den Ersten (Manual) einen Kanal zuweise, dann sind die nächsten 2 ausgegraut, lustigweise ist "Mission Start" mit dabei.
Zum Einfliegen wollte ich nur manuell und ALT-Hold nehmen.
Auch eine Kanalzuweisung auf AUX1 um die Servos des EZFW zu steuern geht nicht. Da tut sich rein gar nichts.
Kann mir jemand BITTE helfen? Ich bin hier echt am Verzweifeln.
Mein PIX4 Klon ist auf einem Tarot 680, Einzelheiten sind jetzt unwichtig..
Als RC habe ich eine MC 32, am Tarot ist ein GR16.
Eingentlich habe ich mich für Pixhawk entschieden weil es laut einigen Seiten mit der HOTT Telemetrie zusammen arbeiten soll.
Da unter APM angeblich das Protokoll nicht integriert ist habe ich die PX4 Stack Firmware geladen, sollte ja laut Aussagen gehen.
Eigentlich sollte man unter etc/extras eine Datei haben/anlegen (extras.txt) die beim Booten mit abgearbeitet wird, dort trägt man den HOTT Telemetrie Start ein.
Im QGC gibt es ein Widget mit dem man Dateien rauf und runterladen kann, ein Upload scheitert aber bei mir mit einer NAK Meldung, Download geht einwandfrei.
Dann habe ich versucht mit Hilfe der Konsole zumindest mal HOTT Telemetrie zu starten, ging auch nicht, (command not found)
Woanders habe ich irgendwo gelesen das man für die Hott Telemetrie sich mittlerweile eine eigene Firmware basteln muss?
Hat da jemand von euch die Telemetrie am laufen?
Angeschlossen ist alles angeblich richtig.
Ferner komme ich nicht klar mit der Zuweisung der Flugzustände, Schalter wären genug da, aber in der Konfiguration soll alles über einen Kanal gehen?
Das man versch. Kanäle zuweisen kann habe ich gesehen, aber sobald ich den Ersten (Manual) einen Kanal zuweise, dann sind die nächsten 2 ausgegraut, lustigweise ist "Mission Start" mit dabei.
Zum Einfliegen wollte ich nur manuell und ALT-Hold nehmen.
Auch eine Kanalzuweisung auf AUX1 um die Servos des EZFW zu steuern geht nicht. Da tut sich rein gar nichts.
Kann mir jemand BITTE helfen? Ich bin hier echt am Verzweifeln.
Zuletzt bearbeitet:
Könnte sein das der Thread dir hilft! Wenn nicht gab es hier einen großen mav2hott .
http://fpv-community.de/showthread....en-Arducopter-und-HoTT&highlight=mavlink2hott
http://fpv-community.de/showthread....en-Arducopter-und-HoTT&highlight=mavlink2hott

