Betaflight 4.3 Filter
- Themenstarter RedBaron
- Beginndatum

Bitte Log von zwei drei Punch-outs teilen.
Tuning-Flug – Betaflight
Aus so einem Piktogramm kann man kaum Infos entnehmen. Dazu braucht man Infos zum Quadcopter - siehe auch hier: Tuning-Probleme mit Blackbox lösen – Betaflight
Tuning-Flug – Betaflight
Aus so einem Piktogramm kann man kaum Infos entnehmen. Dazu braucht man Infos zum Quadcopter - siehe auch hier: Tuning-Probleme mit Blackbox lösen – Betaflight
Habt ihr schon mit den Filtern bei 4.3 gespielt.
Das ist D-Roll. Ist immer noch etwas viel.
Das ist D-Roll. Ist immer noch etwas viel.
Ansonsten ist das mit den filtern nicht groß anders als bei 4.2:
Bei nem 5 Inch freestyler der halbwegs ordentlich Steif ist:
Gyro slider auf 1,5-2 und D-Term Slider max 1.3.
Für alles andere braucht man ein blackboxlog und am besten Pid-Toolbox.
Kannst gerne hochladen dein BB-log (gyro scaled 2khz) und ich schau Mal drüber. Bin zwar kein Pro aber n paar Filtersachen sehe ich glaube schon.
Wie sind deine Slider settings grade? Alles auf Stock BF? RPM Filter an/aus?
Jo hat geklappt - ich hab auch schonmal drübergeschaut.
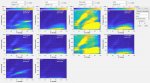
Dein Noisebild sieht eigentlich nicht dramatisch aus - für mich passt da eigentlich alles. RPM Filter arbeiten wunderbar und auch von der Framresonanz bleibt recht wenig übrig. (Links Gyro - links ungefiltert, rechts gefiltert; rechts Dterm - links ungefiltert, rechts gefiltert)
Dein Build ist eh nicht besonders noisy, da selbst der ungefilterte Gyroteil schon gut aussieht.
Ich würde dir aber dennoch empfehlen, mit den Slidern zu tunen. z.B. sehe ich , dass du nen statischen D-Term Filter hast. Den würde ich z.B. lieber auf dynamisch lassen - das passiert eh automatisch, wenn du die Slider aktivierst. Und dann am Besten mit 1,5 Gyroslider und 1,1 D-Term Slider anfangen. Ich meine bei deinem Build sollte Gyroslider auf 1,8-2 kein Problem sein. Aber am besten rantasten.
Ansonsten, wie fliegt sich denn der Kopter?
Du hast nämlich ziemlich wenig PID Authority - Ist das ein Racer oder Freestyler mit HD Cam? Bei nem Freestyler mit den Werten würde ich auf starkes Propwash Wobbeln hin vermuten. Das liegt dann eher an den zu niedrigen Pids als an den Filtern.
Bei nem Freestyler mit HD Cam - also irgendwas um die 650g-750g AUW würde ich alle PID slider auf 1 setzen, dann Hauptmultiplikator auf 1,15-1,2 und FF auch auf 1,2 und von da an weitermachen. Dmin sollte schon in den mittleren 30ern sein.
Dein Noisebild sieht eigentlich nicht dramatisch aus - für mich passt da eigentlich alles. RPM Filter arbeiten wunderbar und auch von der Framresonanz bleibt recht wenig übrig. (Links Gyro - links ungefiltert, rechts gefiltert; rechts Dterm - links ungefiltert, rechts gefiltert)
Dein Build ist eh nicht besonders noisy, da selbst der ungefilterte Gyroteil schon gut aussieht.
Ich würde dir aber dennoch empfehlen, mit den Slidern zu tunen. z.B. sehe ich , dass du nen statischen D-Term Filter hast. Den würde ich z.B. lieber auf dynamisch lassen - das passiert eh automatisch, wenn du die Slider aktivierst. Und dann am Besten mit 1,5 Gyroslider und 1,1 D-Term Slider anfangen. Ich meine bei deinem Build sollte Gyroslider auf 1,8-2 kein Problem sein. Aber am besten rantasten.
Ansonsten, wie fliegt sich denn der Kopter?
Du hast nämlich ziemlich wenig PID Authority - Ist das ein Racer oder Freestyler mit HD Cam? Bei nem Freestyler mit den Werten würde ich auf starkes Propwash Wobbeln hin vermuten. Das liegt dann eher an den zu niedrigen Pids als an den Filtern.
Bei nem Freestyler mit HD Cam - also irgendwas um die 650g-750g AUW würde ich alle PID slider auf 1 setzen, dann Hauptmultiplikator auf 1,15-1,2 und FF auch auf 1,2 und von da an weitermachen. Dmin sollte schon in den mittleren 30ern sein.
Zuletzt bearbeitet:
Kann mich anschließen. Quad ist sehr sauber und recht gut eingestellt. Die Motoren sind am Limit bei maximalen Stickausschlägen, teilweise maxen die ganz schön aus. Ist grade so im akzeptablen Bereich aber am Ende von Manövern kommt recht deutlich cross-axis wobble durch. Etwas niedrigere Drehraten würden hier helfen. Stärke Motoren geht immer, da es aber nur selten passiert würde ich es so lassen.
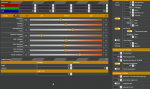
Bezüglich der Filterung: schließe mich Onkel Ho an:
- Gyro Lowpass 2 kann bei F7 Prozessoren und 8K Pidloop aus. Der macht eh nix.
- Gyro Lowpass 1 kann bei dir sicher auch aus. Du hast quasi Noise, den der Lowpass erfassen könnte.
- Dyn Notch würde ich 2 aktivieren, einer kümmert sich um die Resonanz bei 246Hz, ein zweiter wäre nicht schlecht um dem RPM Filter zu helfen. Im D-Term blutet da was leicht durch. MaxHz bis 550. Deine Nosieprofil geht soweit hoch.
- RPM Filter Q würde ich auch 600 setzen, siehe vorheriger Punkt
- D-Term. Dynamic! Static ist nicht nötig, völlig überfiltered. Geh mit dem Slider von 1.2 in 0.1er Schritten nach rechts
- Mach Deadband aus! Du verzögerst nur dein FF!
- Yaw braucht deutlich höhere P/I. Nachtunen. (Slider nicht RPY; nur im RP Modus verwenden).
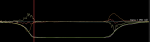
- Step Response sicht ganz gut aus. Pitch benötigt etwas weniger PIDs - hier an den Pitch-spezifischen Slidern etwas runter.
- Master Slider kann sicher noch bissl höher.
Sehr solider, sicherer tune. Da steckt aber viel Reserve drin. Geb ein bisschen der Sicherheit auf und nutze die für einen aggressiveren Tune! Ziel sind nicht "glatte Kurven" in im BBLog sondern wenig Latenz und gutes Sticktracking.
Bezüglich der Filterung: schließe mich Onkel Ho an:
- Gyro Lowpass 2 kann bei F7 Prozessoren und 8K Pidloop aus. Der macht eh nix.
- Gyro Lowpass 1 kann bei dir sicher auch aus. Du hast quasi Noise, den der Lowpass erfassen könnte.
- Dyn Notch würde ich 2 aktivieren, einer kümmert sich um die Resonanz bei 246Hz, ein zweiter wäre nicht schlecht um dem RPM Filter zu helfen. Im D-Term blutet da was leicht durch. MaxHz bis 550. Deine Nosieprofil geht soweit hoch.
- RPM Filter Q würde ich auch 600 setzen, siehe vorheriger Punkt
- D-Term. Dynamic! Static ist nicht nötig, völlig überfiltered. Geh mit dem Slider von 1.2 in 0.1er Schritten nach rechts
- Mach Deadband aus! Du verzögerst nur dein FF!
- Yaw braucht deutlich höhere P/I. Nachtunen. (Slider nicht RPY; nur im RP Modus verwenden).
- Step Response sicht ganz gut aus. Pitch benötigt etwas weniger PIDs - hier an den Pitch-spezifischen Slidern etwas runter.
- Master Slider kann sicher noch bissl höher.
Sehr solider, sicherer tune. Da steckt aber viel Reserve drin. Geb ein bisschen der Sicherheit auf und nutze die für einen aggressiveren Tune! Ziel sind nicht "glatte Kurven" in im BBLog sondern wenig Latenz und gutes Sticktracking.
Super, vielen Danke für die umfassende Analyse. Habe mich nicht getraut mit den Pids hoch zu gehen.
Werde die Vorschläge mal versuchen umzusetzen.
Gewicht ist 610 g mit Xing 2270-KV1800 - Gemfan 51466 und Bluejay 0.16 - MediumHigh und 6 RPM-Rampup
Sollte ich bei RPM-Rampup auf 9 (was Blheli 0,50 entspricht) gehen wenn die Motoren am Limit sind?
Danke, dafür ein Foto der wenigen genialen Momente wenn man über den Wolken fliegen kann.
Werde die Vorschläge mal versuchen umzusetzen.
Gewicht ist 610 g mit Xing 2270-KV1800 - Gemfan 51466 und Bluejay 0.16 - MediumHigh und 6 RPM-Rampup
Sollte ich bei RPM-Rampup auf 9 (was Blheli 0,50 entspricht) gehen wenn die Motoren am Limit sind?
Danke, dafür ein Foto der wenigen genialen Momente wenn man über den Wolken fliegen kann.
Anhänge
-
 137,9 KB Aufrufe: 37
137,9 KB Aufrufe: 37
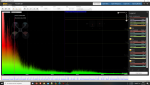
Alles bis 100hz ist eh mehr oder weniger irrelevant, da du hier in den Bereich Propwash/kopterbewegung reinkommst. Das sieht bei dir so schlimm aus, da dein BB-log auch so ewig lang ist. (Zumindest war es beim letzten so) wenn du dir nur ne Minute anschauen würdest, wäre es sicherlich weniger ")
Ansonsten schau dir Mal die Pid-Toolbox an - da kann man meiner Meinung nach deutlich mehr rauslesen, da man den Vergleich gefiltert/ungefiltert besser sieht.
Und letztendlich tunst du ja nicht für ein cleanes noisebild, sondern für ein besseres Fluggefühl. Daher am besten nie alles auf einmal einstellen, sondern zuerst die Filter und dann die Pids. Dazwischen immer wieder kurze (30-60sec) logs fliegen und gucken was passiert und vor allem auch wie es sich anfühlt. Unterfiltert zeigt sich an nem allgemein recht unruhigem Flugverhalten.
Da ich selbst nicht Race, sondern nur freestyle fliege, hab ich da zb die Erfahrung gemacht, dass man Filter ruhig etwas konservativer lassen kann, aber dann mehr an den PIDs dreht. Z.b lasse ich D-Term Slider eher bei 1,1-1,3 Gyro filter bei 1,8-2 und ziehe dafür aber PD relativ hoch für besseres Propwash Handling, da wir halt mit mehr Abfluggewicht eher im unteren-mittleren Throttlebereich fliegen und seltener voll aufdrehen, daher brauchen wir tendenziell mehr PID Authority. Wenn man aber die Filter schon recht auf Kante hat, dann hat man bei den PIDs deutlich weniger Spielraum - vor allem bei D-Term.
Ansonsten wurde ja hier schon angesprochen, dass Rates auch ne Menge ausmachen.
Ansonsten schau dir Mal die Pid-Toolbox an - da kann man meiner Meinung nach deutlich mehr rauslesen, da man den Vergleich gefiltert/ungefiltert besser sieht.
Und letztendlich tunst du ja nicht für ein cleanes noisebild, sondern für ein besseres Fluggefühl. Daher am besten nie alles auf einmal einstellen, sondern zuerst die Filter und dann die Pids. Dazwischen immer wieder kurze (30-60sec) logs fliegen und gucken was passiert und vor allem auch wie es sich anfühlt. Unterfiltert zeigt sich an nem allgemein recht unruhigem Flugverhalten.
Da ich selbst nicht Race, sondern nur freestyle fliege, hab ich da zb die Erfahrung gemacht, dass man Filter ruhig etwas konservativer lassen kann, aber dann mehr an den PIDs dreht. Z.b lasse ich D-Term Slider eher bei 1,1-1,3 Gyro filter bei 1,8-2 und ziehe dafür aber PD relativ hoch für besseres Propwash Handling, da wir halt mit mehr Abfluggewicht eher im unteren-mittleren Throttlebereich fliegen und seltener voll aufdrehen, daher brauchen wir tendenziell mehr PID Authority. Wenn man aber die Filter schon recht auf Kante hat, dann hat man bei den PIDs deutlich weniger Spielraum - vor allem bei D-Term.
Ansonsten wurde ja hier schon angesprochen, dass Rates auch ne Menge ausmachen.
Zuletzt bearbeitet:
Würde ich machen ja - PD hat auf jeden Fall große Auswirkung aufs propwash Handling.
Was ich bei 4.3 mit dem neuen freestyle Kopter meist mache ist, ein RC-Link present wählen. Dann Filter anschauen und anpassen. Dann im Feld Pids nach Gefühl tunen. Fange bei alles Default und Masterslider auf 1.2 an und fliege n paar hatte turns flips rolls und split-s immer schön mit Gewalt in den Propwash rein also bewusst schlechtes Throttle Management.
Dann halt schrittweise die Slider Hoch-ziehen, wieder ne Runde drehen usw. bis es vom Gefühl her passt und die Motoren nicht heiß werden oder oszillieren. Das reicht mir dann eigentlich meistens. Der Rest ist dann angepasstes Throttlemangement.
Das ist sicher nicht perfekt aber mit reicht's halt 🙂
Was ich bei 4.3 mit dem neuen freestyle Kopter meist mache ist, ein RC-Link present wählen. Dann Filter anschauen und anpassen. Dann im Feld Pids nach Gefühl tunen. Fange bei alles Default und Masterslider auf 1.2 an und fliege n paar hatte turns flips rolls und split-s immer schön mit Gewalt in den Propwash rein also bewusst schlechtes Throttle Management.
Dann halt schrittweise die Slider Hoch-ziehen, wieder ne Runde drehen usw. bis es vom Gefühl her passt und die Motoren nicht heiß werden oder oszillieren. Das reicht mir dann eigentlich meistens. Der Rest ist dann angepasstes Throttlemangement.
Das ist sicher nicht perfekt aber mit reicht's halt 🙂