
Ardu Pilot Mega 2.0
- Themenstarter FPVer
- Beginndatum
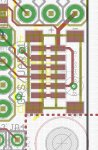
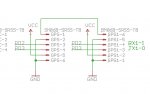

Oder per Widerstand...
10k 0402 SMD
http://api.ning.com/files/XvE4LNGXV...k22bwdAftsuVi-7nzMkBZC0tRVQ__/GPS_disable.bmp
10k 0402 SMD
http://api.ning.com/files/XvE4LNGXV...k22bwdAftsuVi-7nzMkBZC0tRVQ__/GPS_disable.bmp
Pitch Reversed in APM2
Hallo,
habe meinen Quad auf einen neuen Rahmen gesetzt und als X-Konfigutation aufgebaut.
Im MissionPlanner auch alles auf x eingestellt, Motoren haben die richtige Drehrichtung.
Im LiveView, wenn ich über USB dranhänge, habe ich jedoch folgendes Problem:
Rollbewegungen werden in die richtige Richtung angezeigt (künstlicher Horizont).
Nehme ich jedoch die "Nase" nach oben, zeigt der Horizont auf den Boden, es scheind als habe sich der Pitch des APM2 verdreht.
Auch in den RAW-Werten werden Minuswerte des Sensors angezeigt, wenn ich die "Nase" anhebe !?
Bis vorgestern war alles OK, heute gab es ein Update für den MP, habe aber keine Ahnung, ob es daran liegt...
Kann man den Pitch im APM2 umkehren ?
MfG
Alex
Hallo,
habe meinen Quad auf einen neuen Rahmen gesetzt und als X-Konfigutation aufgebaut.
Im MissionPlanner auch alles auf x eingestellt, Motoren haben die richtige Drehrichtung.
Im LiveView, wenn ich über USB dranhänge, habe ich jedoch folgendes Problem:
Rollbewegungen werden in die richtige Richtung angezeigt (künstlicher Horizont).
Nehme ich jedoch die "Nase" nach oben, zeigt der Horizont auf den Boden, es scheind als habe sich der Pitch des APM2 verdreht.
Auch in den RAW-Werten werden Minuswerte des Sensors angezeigt, wenn ich die "Nase" anhebe !?
Bis vorgestern war alles OK, heute gab es ein Update für den MP, habe aber keine Ahnung, ob es daran liegt...
Kann man den Pitch im APM2 umkehren ?
MfG
Alex
Ich hab mir gerade die APM2 Variante ohne GPS bestellt. Iss besser als da selbst rumzupf....
Wenn das APM2 ohne GPS da ist steht mein APM2 mit GPS zum Verkauf.
Wenn das APM2 ohne GPS da ist steht mein APM2 mit GPS zum Verkauf.
Anhang anzeigen 30670

@heckmic
Hab den Handtest gemacht, ist aber nicht positiv verlaufen.
Wenn ich den Qaud in der Hand halte, und nach rechts neige beschleunigen die rechten Motoren und umgekehrt.
Für Front und Heck gilt das gleiche. Er verstärkt also jeweils die Bewegung und gleicht diese nicht aus !?
Wenn ich versuche zu starten (extrem wenig Gas) überschlägt er sich sofort !
Ich habe die Verkabelung und die Drehrichtung der Motoren nochmals überprüft, konnte aber keinen Fehler feststellen ??
Hab den Handtest gemacht, ist aber nicht positiv verlaufen.
Wenn ich den Qaud in der Hand halte, und nach rechts neige beschleunigen die rechten Motoren und umgekehrt.
Für Front und Heck gilt das gleiche. Er verstärkt also jeweils die Bewegung und gleicht diese nicht aus !?
Wenn ich versuche zu starten (extrem wenig Gas) überschlägt er sich sofort !
Ich habe die Verkabelung und die Drehrichtung der Motoren nochmals überprüft, konnte aber keinen Fehler feststellen ??

