
Ardu Pilot Mega 2.0
- Themenstarter FPVer
- Beginndatum
Hi
Thx für die infos -)
Schaltet der Regler nicht ab wenn der Servo die BEC überlastet?
EDIT Soll KEIN STROM ohne Jumper heissen ...
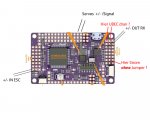
So anschliessen ?
mfg milz
Thx für die infos -)
@milz: Habe gestern meinen APM2 auf UBEC umgebaut.
Der Jumper trennt eigentlich nur die beiden "Stromschienen". Ist er verbunden sind alle +-Leitungen sowohl auf der INPUT(Empfänger) als auch auf der OUTPUT(Motor)-Seite verbunden. Das heist die Regler versorgen sowohl den APM2 als auch deinen Empfänger.
Wenn du den trennst, brauchst du ein UBEC an der Empfängerseite. Dieser versorgt dann den APM2 und deinen Empfänger. Also alles was auf der INPUT-Seite gesteckt ist.
Die BECs von den Reglern wiederum versorgen dann alles was auf der OUTPUT-Seite gesteckt ist, also z.B. die Servos . Wenn dir da die Spannung einbricht interessiert es aber den APM nicht!
Der Jumper trennt eigentlich nur die beiden "Stromschienen". Ist er verbunden sind alle +-Leitungen sowohl auf der INPUT(Empfänger) als auch auf der OUTPUT(Motor)-Seite verbunden. Das heist die Regler versorgen sowohl den APM2 als auch deinen Empfänger.
Wenn du den trennst, brauchst du ein UBEC an der Empfängerseite. Dieser versorgt dann den APM2 und deinen Empfänger. Also alles was auf der INPUT-Seite gesteckt ist.
Die BECs von den Reglern wiederum versorgen dann alles was auf der OUTPUT-Seite gesteckt ist, also z.B. die Servos . Wenn dir da die Spannung einbricht interessiert es aber den APM nicht!
EDIT Soll KEIN STROM ohne Jumper heissen ...
So anschliessen ?
mfg milz
Hallo milz, so solltest Du das auf keinen Fall anschließen. Du hast +/- auf beiden Seiten falsch. Schau noch mal genau im Wiki nach (- ist außen, + in der Mitte und S innen). An welchen Pin Du +/- anschließt spielt keine Rolle, der Jumper trennt (oder verbindet) nur die Out- und In-Seite des APM.
Das war nur als Beispiel wo ich den UBEC und wo ich den ESC anschliesse.
Das mit dem trennen ist mir immer noch nicht ganz klar. Die I/0 Leiste (A0-A11) an
Seite bekommt von welcher Seite Strom wenn der Jumper gezogen ist ?
Mfg milz
Dazu sagt Chris Anderson:
ABER: Hier hat jemand schon was gemacht: http://diydrones.com/forum/topics/j...rd-gps?id=705844:Topic:885893&page=3#comments
ABER: Hier hat jemand schon was gemacht: http://diydrones.com/forum/topics/j...rd-gps?id=705844:Topic:885893&page=3#comments
Danke für einen sachdienlichen Hinweis
@milz Wenn der Jumper gezogen ist, kriegt der ganze APM den Strom von der IN-Seite, also die, wo die RX dran kommt. Bis auf die OUT-Schiene, die muss dann extra Strom, z.B. über den BEC eines ESC, kriegen. Bei der Leiste (A0-A11) bin ich mir jetzt nicht sicher, woher die den Strom hat. Aber kann man doch leicht ausprobieren.
@milz Wenn der Jumper gezogen ist, kriegt der ganze APM den Strom von der IN-Seite, also die, wo die RX dran kommt. Bis auf die OUT-Schiene, die muss dann extra Strom, z.B. über den BEC eines ESC, kriegen. Bei der Leiste (A0-A11) bin ich mir jetzt nicht sicher, woher die den Strom hat. Aber kann man doch leicht ausprobieren.
Von welcher Seite die I/O Pins Strom kriegen kann man testen. Aber wo schliesse ich den Strom an der IN-Seite an. Im Moment habe ich den Jumper drauf und der Strom kommt von der OUT Seite rein wie im WIKI beschrieben. Also klemme ich jeweils einmal Strom auf die In und Out Leiste (ohne Jumper J1).
Wie würdet ihr es machen? UBEC nehmen um die APM2 und die Sensoren zu versorgen um zu verhindern das der ESC übermässig warm wird und die Servos über weiter einen ESC betreiben oder besser 2 UBEC nehmen und die ESC nur für die Motoren. Bei einem der ESC hatte es Isolierung am 5V Spannungsregler aufgelöst.
Der hatte alles mit Strom versorgt allerdings noch ohne Servos. Hab den jetzt mal vorsichtshalber getauscht. Wenn ich jetzt die Servos an den ESC hänge wird der doch sicher auch wieder gut heiß ?
Weis jemand wozu J2-J4 sind ?
Neben JP1 Richtung hinten sind noch mal 4 Pins. Weis jemand wofür die gut sind ?
Der Rest ist ja soweit dokumentiert.
mfg milz
no gps bei APM 2.0
Guten Abend zusammen,
ich bin ein kompletter Einsteiger in Sachen RC Modellbau / -flug und habe seit Anfang der Saison eine TS 2 mit eingebautem Ardupilot Mega 2.0, inkl. GPS.
Hier habe ich bisher ausschließlich die Funktionen Stabilize und RTH benutzt, was auch einwandfrei funktionierte.
Heute habe ich den Autopiloten mittels USB an meinen Rechner angeschlossen und mir den Mission Planner näher angesehen, ohne etwas verstellt zu haben.
Die GPS-Signale wurden schnell gefunden, Standort und Neigung einwandfrei angezeigt (offener Balkon, guter GPS-Empfang).
Heute Abend wollte ich mir noch mal die Wegpunkt-Funktionen ansehen und habe den APM erneut an mein Laptop angeschlossen.
Die kleine blaue LED-Lampe am GPS-Modul hat ca. 1-2 Minuten geblinkt, bis sie konstant aufleuchtete, was ja eigentlich den GPS-Fix anzeigt.
Der Mission Planner zeigte mir zwar 100 % Signal an, jedoch auch leider no gps.
Dies änderte sich auch nach 15 Minuten warten und mehrfachen "Ein- und Ausschalten" nicht. Das Ergebnis war immer das selbe, no gps.
Ich habe mal zwei Bilder beigefügt, die mein Problem verdeutlichen.
Das APM Wiki habe ich gelesen, auch wenn mich das nicht weitergebracht hat.
Es wurden an den Steckverbindungen, Lötstellen usw. nichts verändert... das ist das komische.
Ich hoffe es gibt für mein Problem eine Lösung... ohne direkt das GPS-Modul auszutauschen.
Vielen Dank für eure Hilfe!!
Gruß,
Knappe.
Guten Abend zusammen,
ich bin ein kompletter Einsteiger in Sachen RC Modellbau / -flug und habe seit Anfang der Saison eine TS 2 mit eingebautem Ardupilot Mega 2.0, inkl. GPS.
Hier habe ich bisher ausschließlich die Funktionen Stabilize und RTH benutzt, was auch einwandfrei funktionierte.
Heute habe ich den Autopiloten mittels USB an meinen Rechner angeschlossen und mir den Mission Planner näher angesehen, ohne etwas verstellt zu haben.
Die GPS-Signale wurden schnell gefunden, Standort und Neigung einwandfrei angezeigt (offener Balkon, guter GPS-Empfang).
Heute Abend wollte ich mir noch mal die Wegpunkt-Funktionen ansehen und habe den APM erneut an mein Laptop angeschlossen.
Die kleine blaue LED-Lampe am GPS-Modul hat ca. 1-2 Minuten geblinkt, bis sie konstant aufleuchtete, was ja eigentlich den GPS-Fix anzeigt.
Der Mission Planner zeigte mir zwar 100 % Signal an, jedoch auch leider no gps.
Dies änderte sich auch nach 15 Minuten warten und mehrfachen "Ein- und Ausschalten" nicht. Das Ergebnis war immer das selbe, no gps.
Ich habe mal zwei Bilder beigefügt, die mein Problem verdeutlichen.
Das APM Wiki habe ich gelesen, auch wenn mich das nicht weitergebracht hat.
Es wurden an den Steckverbindungen, Lötstellen usw. nichts verändert... das ist das komische.
Ich hoffe es gibt für mein Problem eine Lösung... ohne direkt das GPS-Modul auszutauschen.
Vielen Dank für eure Hilfe!!
Gruß,
Knappe.
Anhänge
-
 196 KB Aufrufe: 11
196 KB Aufrufe: 11 -
 118 KB Aufrufe: 11
118 KB Aufrufe: 11
Zuletzt bearbeitet:
das problem hat mein 1er auch ab und zu, scheint aber eher ein problem des MP´s zu sein. Wenn ich im MP den Flightplaner nutze und unten rechts auf Home Location klicke wird mein standort korrekt angezeigt. Das sagt mir das der APM das Signal sauber verwertet. Leider kann ich erst nächste Woche bilder machen weil mein APM einen defekten Gyro hat und in Reparatur ist.
Ich hatte auch manchmal keine reaktion vom kompass im MP.
Ich nutze seitdem ein nacktes Windows 7 Home 64 Bit das ich auf einer WechselHD aufgespielt habe, seitdem ist der Fehler bei mir nicht mehr aufgetreten.
Ich hatte auch manchmal keine reaktion vom kompass im MP.
Ich nutze seitdem ein nacktes Windows 7 Home 64 Bit das ich auf einer WechselHD aufgespielt habe, seitdem ist der Fehler bei mir nicht mehr aufgetreten.
Was ist denn mit der blauen LED direkt auf dem APM2, die neben der roten? GPS-Lock hat er erst dann, wenn auch die konstant an ist.
Danke schon mal für den Tipp!
@avidav:
Leider scheint es so, dass er trotz konstant leuchtender blauen LED auf dem GPS-Modul kein GPS gefixt hat, da sich die Ruder bei aktiver Stabilization nicht bewegen.
Als heute Vormittag noch das GPS-Signal gefixt wurde, konnte man "Trockenübungen" machen, indem man das Flugzeug um seine Achsen bewegte und sich automatisch stabilisieren ließ.
Morgen achte ich mal auf die blaue LED auf dem APM, ob diese auch konstant leuchtet.
Wie anfällig sind solche Platinen eigentlich? Um an den USB-Anschluss zu gelangen, musste ich die Platine vorsichtig aus dem Rumpf heben... dadurch dürfte diese aber ja eigentlich nicht beschädigt werden!?
Vielen Dank schon mal für eure Tipps!
Einen schönen Abend noch,
Knappe.

