Hast du inzwischen eigentlich noch etwas an den PID & restlichen Werten verändert ?
Nein die sind alle noch wie vorher. Um die Werte alle zu ändern, möchte ich vorher mit den Standardwerten lernen und ein Gefühl dafür bekommen. Dann hoffe ich, dass ich den Unterschiede (Verbesserung, Verschlechterung) besser erkennen kann.
Das einzige was ich kurz vor dem Absturz verändert hatte war der MAX_THROTTLE Wert in der config.h. Diesen hatte ich auf 1950 gesetzt. Hab ihn aber nun vorsichtshalber wieder zurückgesetzt auf 1850.
Boah, 84 km/h, die hätte ich auch gerne mal/würde ich mal ablesen, GPS Modul muss noch her...
Die 84 km/h habe ich leider nur bei diesem Absturz erreicht. Normal schafft der kleine so zwischen 55 - 60 km/h. Auf die 84 km/h Höchstgeschwindigkeit kann ich auch gerne verzichten, wenn es bedeutet, dass er wieder auf dem Boden landet.
")
Magst Du Deine Anleitung bitte um das GPS-Modul ergänzen umd den groben Einbau, vor allem aber bitte die notwendige Konfiguration ergänzen?
Ist schon in Arbeit. Den Text habe ich schon geschrieben, die Bilder sind gemacht müssen aber noch bearbeitet werden. Ich hoffe, dass ich in den nächsten Tagen einen neuen Abschnitt "Erweiterungen" online stellen kann.
Was wollt ihr alle mit dem
GPS Teil ?
Schaut euch mal das
UniSens-E an, ...
Ok interessant finde ich da die Spannungs-/ Leistungsdaten und den Höhensensor. Aber bei diesem Produkt würden mir einfach noch die GPS Daten fehlen, aus denen noch Werte wie Richtung und Geschwindigkeit hervorgehen.
Die Drehzahlerfassung für einen Motor ist auch recht sinnlos da ein QuadroKopter 4 Motoren hat.
Ich wollte zu Anfang eigentlich nur wissen "Wie schnell fliegt das Ding eigentlich?" und das könnte mir der UniSens-E nicht liefern. (Hab aber nur kurz in die Produktbeschreibung geschaut.)
Von dem "1 sec vorher Pitch rumgerissen", sieht man in den Diagrammen nicht viel. Sicher, dass Du die Lage richtig erkannt hast und nicht aus Versehen zu weit Pitch (=360 Grad) gegeben hast? Das würde das Diagramm eher hergeben. Also Irgendwas gemacht und dabei Gas gegeben und dann beim Versuch abzufangen, rückwärts überdreht würde ich eher aus dem Diagramm interpretieren. Sowas kann passieren, wenn die Kanalkurve nicht linear ist. Ich habe das Verhalten bei meinem NanoWii, wenn ich die Pitch/ Roll-Rate größer als 0,7-0,8 habe. Dann sind Pitch und Roll relativ zahm, nur ab einem gewissen Ausschlag flippt er mit maximaler Drehrate. ...
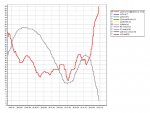
Nein das geht aus dem Diagramm nicht hervor. Ich wollte nur zeigen wie schnell es gehen kann die Geschwindigkeit zu steigern und dabei die Höhe zu verlieren
Bei diesem Absturz bin ich im Stable-Mode geflogen. Throttle war dabei auf 2000ns und Pitch war auch bei 2000ns. Ich vermute er war leicht überkippt. Als ich dann mitbekommen habe, dass er sehr schnell auf den Weg nach unten ist, habe ich Pitch ~1 Sekunde vorher voll zurückgerissen auf 1000ns. Davon merkte ich aber nichts mehr. Am Ende ist dann der Ausleger vorne rechts auf dem Boden aufgeschlagen.
Hier hätte ich gerne die Daten der NanoWii gehabt (Lage-, Empfängerinformationen). Diese noch zusätzlich mit dem GPS an der HoTT Telemetrie wäre echt super.