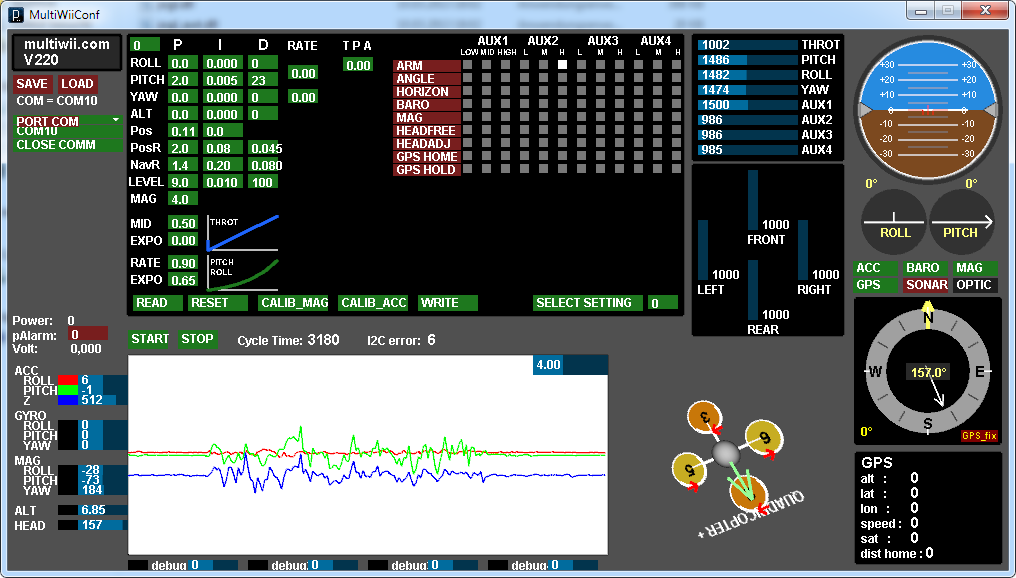
Setup:
- Nur Pitch-Achse aktiv, Roll festgebunden
- PID Pitch: P: 2.0 I: 0.005 D: 23 (davor schonmal P: 3.3 I: 0.030 D: 23 selber Effekt)
- 20A BEC Regler
- MultiWii
- FlameWheel Rahmen
- AcroMode
- Props gewichtet
- FC auf Gummipuffern montiert
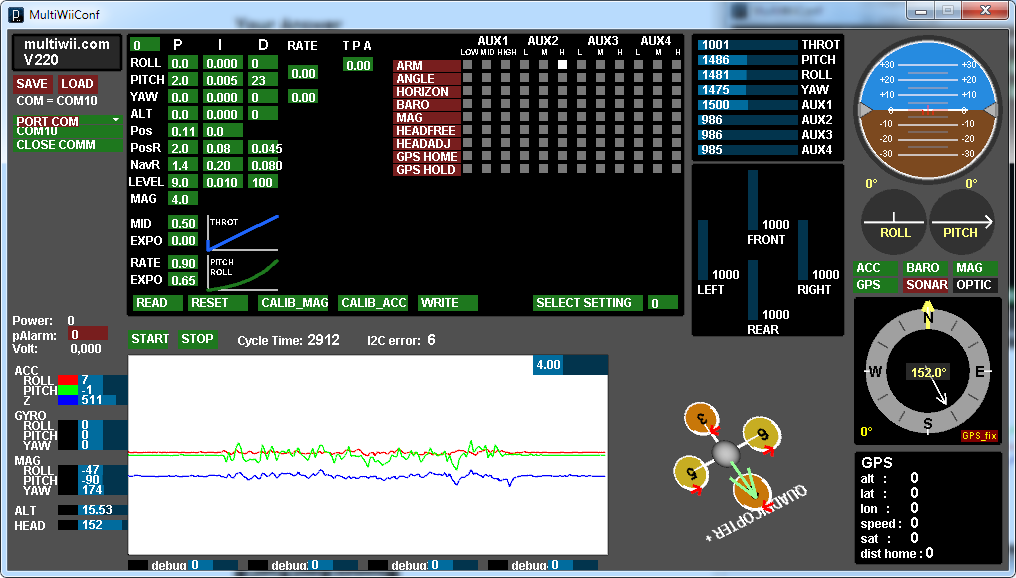
Folgendes Problem: Ich hebe mit dem Quad ab, ca. 2-3 Sekunden bleibt er stabil in der Luft und lässt sich auch super steuern. Irgendwann fängt dann so ein leichtes Schwingen an was auch nicht wieder weggeht, aber auch nicht stärker wird,
Hier hört man es ganz gut ab 0:43 ein Wobbeln der Drehzahlen der Motoren:
http://www.youtube.com/watch?v=gMBU3eGXFnk
Sobald ich mal mit dem Schub etwas hochgehen kommt der Quad in eine Art "hüpfen" und stürzt dann meist mit ziemlich Speed ab, beim Versuch zu landen (da er ja hüpft).
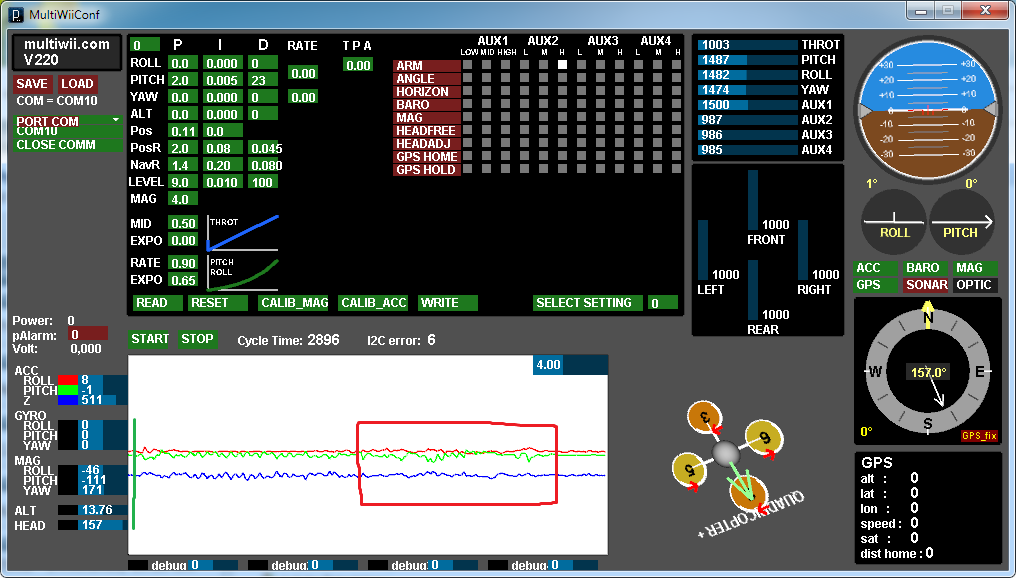
Hier am Ende des Videos sieht / hört man das "hüpfen":
http://www.youtube.com/watch?v=llBdmTlMfqk
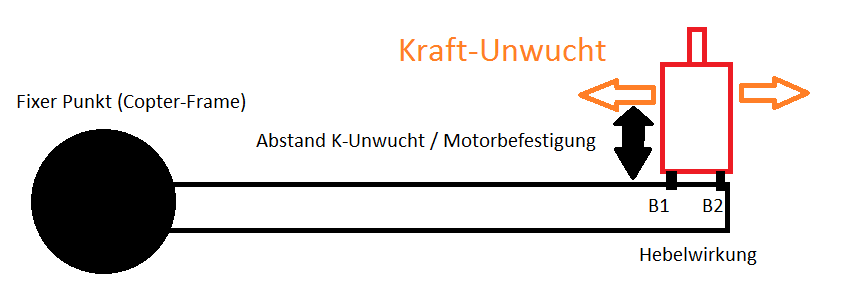
Was mir noch aufgefallen ist, dass wenn die Drehzahl während der aufwärtsbewegung sehr hoch ist, eine relativ starke Vibration am Rahmen zu spüren ist. Evtl., die Probs sind jedoch gewichtet und sollten eigentlich nicht dafür verantwortlich sein. Wäre es evtl. sinvoll MAX_THROTTLE zu verkleinern?
P = 2.0 ist ja schon relativ klein, oder ist es sinnvoll da noch niedriegere Werte zu verwenden?
- Nur Pitch-Achse aktiv, Roll festgebunden
- PID Pitch: P: 2.0 I: 0.005 D: 23 (davor schonmal P: 3.3 I: 0.030 D: 23 selber Effekt)
- 20A BEC Regler
- MultiWii
- FlameWheel Rahmen
- AcroMode
- Props gewichtet
- FC auf Gummipuffern montiert
Folgendes Problem: Ich hebe mit dem Quad ab, ca. 2-3 Sekunden bleibt er stabil in der Luft und lässt sich auch super steuern. Irgendwann fängt dann so ein leichtes Schwingen an was auch nicht wieder weggeht, aber auch nicht stärker wird,
Hier hört man es ganz gut ab 0:43 ein Wobbeln der Drehzahlen der Motoren:
http://www.youtube.com/watch?v=gMBU3eGXFnk
Sobald ich mal mit dem Schub etwas hochgehen kommt der Quad in eine Art "hüpfen" und stürzt dann meist mit ziemlich Speed ab, beim Versuch zu landen (da er ja hüpft).
Hier am Ende des Videos sieht / hört man das "hüpfen":
http://www.youtube.com/watch?v=llBdmTlMfqk
Was mir noch aufgefallen ist, dass wenn die Drehzahl während der aufwärtsbewegung sehr hoch ist, eine relativ starke Vibration am Rahmen zu spüren ist. Evtl., die Probs sind jedoch gewichtet und sollten eigentlich nicht dafür verantwortlich sein. Wäre es evtl. sinvoll MAX_THROTTLE zu verkleinern?
P = 2.0 ist ja schon relativ klein, oder ist es sinnvoll da noch niedriegere Werte zu verwenden?
 aber die krieg ich net in meinen Frame wenn ich nicht die Landefüße wegsäge
aber die krieg ich net in meinen Frame wenn ich nicht die Landefüße wegsäge