
"Zittern" des Copters nach ein paar Sekunden b.z.w. bei stärkerem Schub
- Themenstarter Spacefish
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Schaut jut aus ") Aber soweit bin ich leider nicht in der Materie das ich dies beurteilen kann. Ich kann mir nur vorstellen das durch die Puffer nur noch alles verzögert bei der FC ankommt und eine Regelung unmöglich macht. Lasse mich gerne eines besseren belehren . Ich würde an deiner Stelle einfach den Test wagen mit den Puffern. Bin gespannt auf die Tests wenn du es wagst den Vogel mit Puffern zu fliegen
Aber soweit bin ich leider nicht in der Materie das ich dies beurteilen kann. Ich kann mir nur vorstellen das durch die Puffer nur noch alles verzögert bei der FC ankommt und eine Regelung unmöglich macht. Lasse mich gerne eines besseren belehren . Ich würde an deiner Stelle einfach den Test wagen mit den Puffern. Bin gespannt auf die Tests wenn du es wagst den Vogel mit Puffern zu fliegen
Aber soweit bin ich leider nicht in der Materie das ich dies beurteilen kann. Ich kann mir nur vorstellen das durch die Puffer nur noch alles verzögert bei der FC ankommt und eine Regelung unmöglich macht. Lasse mich gerne eines besseren belehren . Ich würde an deiner Stelle einfach den Test wagen mit den Puffern. Bin gespannt auf die Tests wenn du es wagst den Vogel mit Puffern zu fliegen
Schaut jut aus Aber soweit bin ich leider nicht in der Materie das ich dies beurteilen kann. Ich kann mir nur vorstellen das durch die Puffer nur noch alles verzögert bei der FC ankommt und eine Regelung unmöglich macht. Lasse mich gerne eines besseren belehren . Ich würde an deiner Stelle einfach den Test wagen mit den Puffern. Bin gespannt auf die Tests wenn du es wagst den Vogel mit Puffern zu fliegen
Aber soweit bin ich leider nicht in der Materie das ich dies beurteilen kann. Ich kann mir nur vorstellen das durch die Puffer nur noch alles verzögert bei der FC ankommt und eine Regelung unmöglich macht. Lasse mich gerne eines besseren belehren . Ich würde an deiner Stelle einfach den Test wagen mit den Puffern. Bin gespannt auf die Tests wenn du es wagst den Vogel mit Puffern zu fliegen
Oder kennt Jemand zufällig eine günstige Quelle für die Dinger? Gerne auch Andere, die Aktuellen sind diese hier: http://www.ebay.de/itm/251028435747?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649 Sie sind relativ steif / hart, aber dämpfen durch die Länge gut Vibrationen in Scheerichtung.
Also ich hab jetzt hier nicht alles durchgelesen. Ist ja auch eher im Chat-Stil geschrieben als Forumsstil.
Ich verstehe aber nicht wie ihr von unstabilem Kopter zu neuen Motoren kommt.
Nach meiner Meinung muss jeder Kopter durch Einstellungen der PIDs stabil bekommen zu sein wenn die Steifigkeit des Aufbaus das zulässt. Ist jetzt nicht das idealste Frame aber es sollte schon klappen. Ich fürchte das deine Gummipuffer am Motor nur ein zusätzliches Schwingungselement ins Frame bringen. Hab im Internet schon genug Videos gesehen von Koptern die einen halben Propeller verloren haben und dann noch immer relativ normal weiter fliegen. Da braucht man normalerweise nur genug Schub und eine gute Regelung + Frame. Wobei in dem Fall selbst ein Baumarktframe reicht.
Ich verstehe aber nicht wie ihr von unstabilem Kopter zu neuen Motoren kommt.
Nach meiner Meinung muss jeder Kopter durch Einstellungen der PIDs stabil bekommen zu sein wenn die Steifigkeit des Aufbaus das zulässt. Ist jetzt nicht das idealste Frame aber es sollte schon klappen. Ich fürchte das deine Gummipuffer am Motor nur ein zusätzliches Schwingungselement ins Frame bringen. Hab im Internet schon genug Videos gesehen von Koptern die einen halben Propeller verloren haben und dann noch immer relativ normal weiter fliegen. Da braucht man normalerweise nur genug Schub und eine gute Regelung + Frame. Wobei in dem Fall selbst ein Baumarktframe reicht.
Richtig, das ist ein ganz simples PID Problem - nichts anderes. PIDs müssen langsam erflogen werden. Mal irgendwie voll auf 0 drehen hat keinen Sinn. Maximal um einen Faktor von 25% rauf oder runter um zu sehen was sich ändert. Und dann um 12,5%, dann um 6%... also erst die grobe Richtung herausfinden und dann langsam fein abstimmen. Das dauert nun einmal etwas.Vor allem nicht irgendwas machen, sondern in etwa verstehen was man da tut
Sehe ich genauso. Er ist mit den PID Werten zwar schon ziemlich runtergegangen aber so wie ich das ja schon gesgat habe würde ich noch mit den LPF Einstellungen in der config runtergehen. Das hat bei mir geholfen. Das mit den Gummipuffern halte ich auch für eine schlechte Idee. So etwas ähnliches hatte ich auch bei meinem FC. Ich hatte ihn mit schaumstoff gepolstert, jedoch hat diese Polsterung nur nochmehr Vibrationen ausgelöst und somit wurde der Gyro gestört. Nun habe ich sie auf Plastikabstandhalter geschraubt und es funktioniert einwandfrei. Deshalb würde ich immer empfehlen solche Aktionen zu lassen und z.B. die Motoren wirklich fest auf die Ausleger schrauben.
Was ich nicht verstehe? Warum an den PID überhaupt rumgeschraubt wird? Also bei mir sind alle DJI Copter auf Anhieb sauber geflogen!
Zu den Reglern und den Motoren: Beides Schrott!
Die Propeller dann noch auf Propmounts auf der Welle montiert?
Emax GT, oder Tiger Motoren. Die gewuchteten Propeller DIREKT auf die Glocken schrauben, dann fliegt der Copter auch!
Zu den Reglern und den Motoren: Beides Schrott!
Die Propeller dann noch auf Propmounts auf der Welle montiert?
Emax GT, oder Tiger Motoren. Die gewuchteten Propeller DIREKT auf die Glocken schrauben, dann fliegt der Copter auch!
Wenn du genau das Setup hast (oder vergleichbar) die der Enwickler der Software hat, dann musst du auch nichts ändern. Es gibt eben 1000000000000000 verschiedene Hardwarekombinationen - die muss man anpassen. Ich habe da schon so einige Copter gebastelt - von groß bis winzig
PID muss man einstellen, das mache ich bei jedem Copter. Beim einem dauert es länger, beim anderen passen die Standardwerte schon ganz gut - Ein bisschen was gibt es immer zu verbessern.
PID muss man einstellen, das mache ich bei jedem Copter. Beim einem dauert es länger, beim anderen passen die Standardwerte schon ganz gut - Ein bisschen was gibt es immer zu verbessern.
Ich habe übrigens genau die selben Ausleger wie du ich lade mal ein Foto hoch wie ich das Problem mit der Motorbefestigung gelöst habe.


Da keine Löcher vorgebohrt waren um die Motoren mit Halterplatte anzuschrauben hab ich einfach welche gebohrt. Das hält super und wenn du gewuchtete Rotoren und gewuchtete Motoren hast kommen da eh kaum vibrationen an.
Da keine Löcher vorgebohrt waren um die Motoren mit Halterplatte anzuschrauben hab ich einfach welche gebohrt. Das hält super und wenn du gewuchtete Rotoren und gewuchtete Motoren hast kommen da eh kaum vibrationen an.
Was ich nicht verstehe? Warum an den PID überhaupt rumgeschraubt wird? Also bei mir sind alle DJI Copter auf Anhieb sauber geflogen!
DJI werden meistens doch sowieso nur Kampfgeschwebt da braucht man nicht mal die eine gute Regelung sondern nur eine sehr ruckelarme Regelung.
Ich habe übrigens genau die selben Ausleger wie du ich lade mal ein Foto hoch wie ich das Problem mit der Motorbefestigung gelöst habe.
Anhang anzeigen 58726 Anhang anzeigen 58727
Da keine Löcher vorgebohrt waren um die Motoren mit Halterplatte anzuschrauben hab ich einfach welche gebohrt. Das hält super und wenn du gewuchtete Rotoren und gewuchtete Motoren hast kommen da eh kaum vibrationen an.
Anhang anzeigen 58726 Anhang anzeigen 58727
Da keine Löcher vorgebohrt waren um die Motoren mit Halterplatte anzuschrauben hab ich einfach welche gebohrt. Das hält super und wenn du gewuchtete Rotoren und gewuchtete Motoren hast kommen da eh kaum vibrationen an.
Wie gesagt ich habe schon viel mit den PIDs experimentiert allerdings wenn ich unter 2,0 mit P runtergehen muss, damit der Copter halbwegs fliegt, dann passt doch irgendwas prinzipiell nicht.
Ich habe 0,0 nur eingestellt um zu testen ob es überhaupt an der Steuerung liegt b.z.w. ob er die Werte überhaupt übernimmt.
Ich habe jetzt auch mal die 30€ investiert um die Sache mit den Puffern zu testen, die Steuerung soll ja garnicht auf die Motoren reagieren sondern auf die Bewegung des Frames, somit sehe ich da kein Problem zwecks "das die Steuerung es nichtmehr mitkriegt"
Wenn der Kopter viel Schub hat und relativ klein ist kann P durchaus recht niedrig werden. Ich vermute allerdings als Ursache des Übels eher den D-Anteil. Der ist imho relativ hoch. Die ganzen kleinen Vibrationen könnten das imho instabil werden lassen.
Das Problem mit den Puffern ist das du zusätzlich Masse schwingfähig machst. Speziell da du meinst das das Problem durch Yaw und genau dort die neue Schwingung zusätztlich reinkommt find ich das etwas bedenklich.
Das Problem mit den Puffern ist das du zusätzlich Masse schwingfähig machst. Speziell da du meinst das das Problem durch Yaw und genau dort die neue Schwingung zusätztlich reinkommt find ich das etwas bedenklich.
Ich hatte die Motoren zuerst mit den vorgebohrten Löchern befestigt, jedoch sitzen die Motoren mit den Halteplatten flacher und stabiler auf den Armen. Hast du jetzt eigentlich schon mal probiert den LPF Wert runterzusetzen? Meiner Meinung nach war es dumm die Puffer für 30€ zu kaufen. Man sollte als aller erstes die kostenlosen Varianten ausprobieren bevor man groß was bestellt was dann im Endeffekt eh nichts nützt da der Fehler villeicht nur an einer kleinen Einstellung in der config liegt.
Wenn ich deine Bilder richtig interpretiere hast du Vibrationen auf dem FC. Da die Zuckungen oder Hüpfer des Copters ja nicht dauerhaft sondern meistens beim Gasgeben (wo natürlich die Belastung auf die Motoren und somit die Vibrationen am größten sind) nehme ich an, dass der Gyrosensor durch die Vibrationen gestört wird. Das ist nicht schlimm und ganz Vibrationsfrei wirst du dein FC nie bekommen aber dagegen wirkt der LPF Wert. Setz ihn einfach mal herunter kostet nichts und ist in 2 Minuten erledigt und ich bin mir ziemlich sicher das die Hüpfer oder Zuckungen dadurch besser werden. Allerdings musst du beim runtersetzen aufpassen, da dadurch sich auch die PID Werte ändern. Das heißt das du die PID Werte dann z.B. wieder weiter hoch setzen musst. Ich würde dir aber empfehlen, die PID Werte zurückzusetzen, mit dem LPF Wert langsam runterzugehen bis du merkst so könnte es gehen und die kleineren Wackler oder Hüpfer mit den PID Werten nachjustierst.
LPF runtersetzen hatte ich schon probiert, aber muss das nochmal ausgiebieger testen.
Aber die Dämpfer am Motor bringen schon ein bisschen was, wie man auch an den Diagrammen sieht:
Ohne Dämpfer:
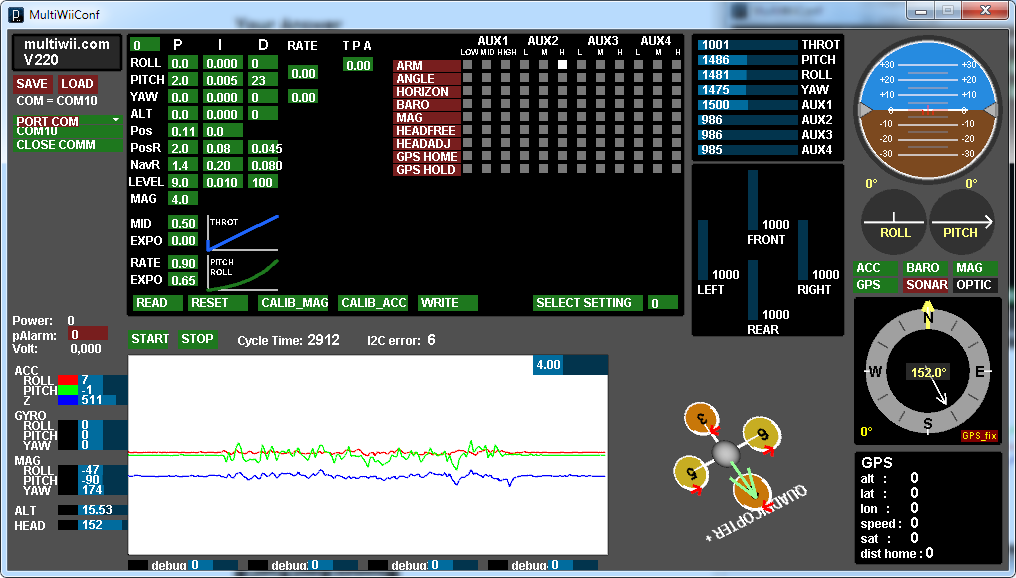
Mit Dämpfer:
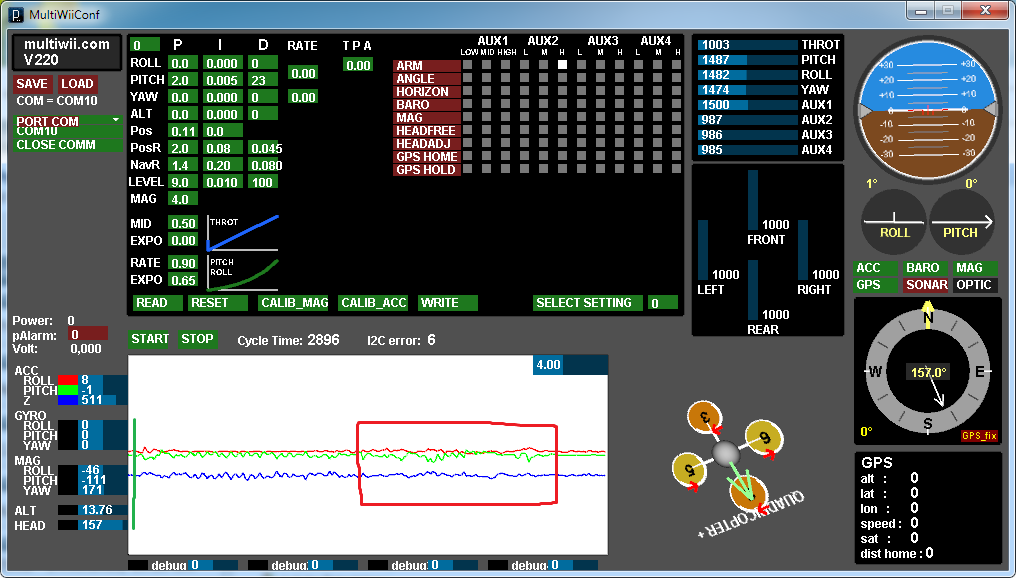
bitte bei dem Bild mit Dämpfer das eingerahme rote nicht beachten, dass ist bei einer problematischen Frequenz die bei dem drüber nicht gemessen wurde. Also eigentlich jeweils die 1. Hälfte ist zum vergleichen ganz gut.
Aber die Dämpfer am Motor bringen schon ein bisschen was, wie man auch an den Diagrammen sieht:
Ohne Dämpfer:
Mit Dämpfer:
bitte bei dem Bild mit Dämpfer das eingerahme rote nicht beachten, dass ist bei einer problematischen Frequenz die bei dem drüber nicht gemessen wurde. Also eigentlich jeweils die 1. Hälfte ist zum vergleichen ganz gut.
Testest du eigentlich im Acro Mode oder in Stable? Und hast du mal die Daten von Gyro angeschaut? Ich weiß nicht genau wie der Regelkreis der Wii aussieht aber im APM ist der Gyro Acro Regelkreis der wichtigere für die Grundstabilität.
Ich würde erstmal versuchen diesen Regelkreis stabil zu bekommen. Die Dämpfer werden definitiv die Schwankungen beim ACC verringern, aber das kann auf Kosten der Schwankungen im Gyro gehen. Wie ich oben geschrieben habe ist die Verschlechterung durch die Dämpfer wenn sehr wahrscheinlich auf dem Yaw zu treffen und das wird eben nicht durch ACC gemessen sondern durch die Gyros. Das angebunden zu testen ist wahrscheinlich aber auch nicht sehr hilfreich.
Ich würde erstmal versuchen diesen Regelkreis stabil zu bekommen. Die Dämpfer werden definitiv die Schwankungen beim ACC verringern, aber das kann auf Kosten der Schwankungen im Gyro gehen. Wie ich oben geschrieben habe ist die Verschlechterung durch die Dämpfer wenn sehr wahrscheinlich auf dem Yaw zu treffen und das wird eben nicht durch ACC gemessen sondern durch die Gyros. Das angebunden zu testen ist wahrscheinlich aber auch nicht sehr hilfreich.
Testest du eigentlich im Acro Mode oder in Stable? Und hast du mal die Daten von Gyro angeschaut? Ich weiß nicht genau wie der Regelkreis der Wii aussieht aber im APM ist der Gyro Acro Regelkreis der wichtigere für die Grundstabilität.
Ich würde erstmal versuchen diesen Regelkreis stabil zu bekommen. Die Dämpfer werden definitiv die Schwankungen beim ACC verringern, aber das kann auf Kosten der Schwankungen im Gyro gehen. Wie ich oben geschrieben habe ist die Verschlechterung durch die Dämpfer wenn sehr wahrscheinlich auf dem Yaw zu treffen und das wird eben nicht durch ACC gemessen sondern durch die Gyros. Das angebunden zu testen ist wahrscheinlich aber auch nicht sehr hilfreich.
Ich würde erstmal versuchen diesen Regelkreis stabil zu bekommen. Die Dämpfer werden definitiv die Schwankungen beim ACC verringern, aber das kann auf Kosten der Schwankungen im Gyro gehen. Wie ich oben geschrieben habe ist die Verschlechterung durch die Dämpfer wenn sehr wahrscheinlich auf dem Yaw zu treffen und das wird eben nicht durch ACC gemessen sondern durch die Gyros. Das angebunden zu testen ist wahrscheinlich aber auch nicht sehr hilfreich.
Ich habe mir grade noch ein kleines Tool geschrieben, welches mir die letzten X Werte integriert. Wollte da dann noch eine Plotfunktion einbauen, die Gasbefehl an ESC / Vibrationstärke für die 3 Achsen farbig plottet.
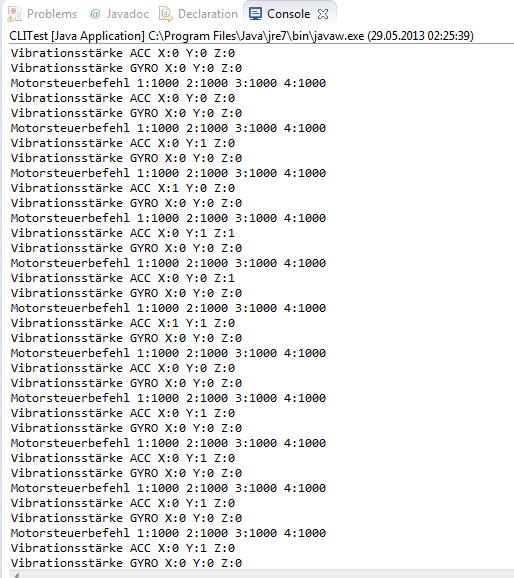
Wenn das Tool mal fertig wird, stell ich es auch gerne zur Verfügung, es wäre ja dann ideal um verschiedene Aufbauten zu vergleichen (mit dem selben FC) da es ja numerische Werte auspuckt und nicht nur rein optisch ablesbar ist.
So hab die Daten jetzt mal schnell in LibreOffice geplotet:
X-Achse = ESC-Steuerbefehl
Y-Achse = Vibrationen in der betrefenden Achse (verschiedene Werteskala beachten)
Ohne Dämpfer am Motor:
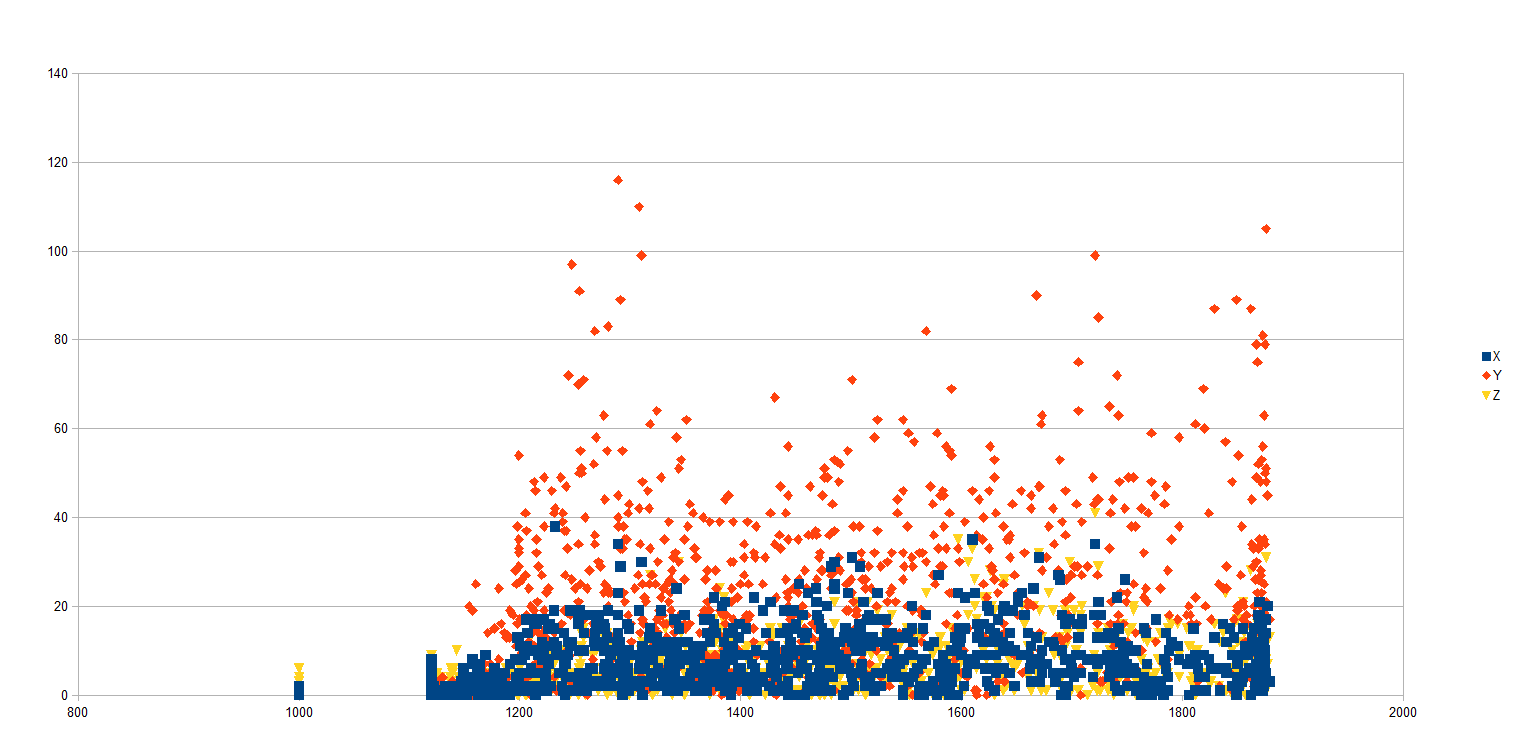
Mit Dämpfer am Motor:
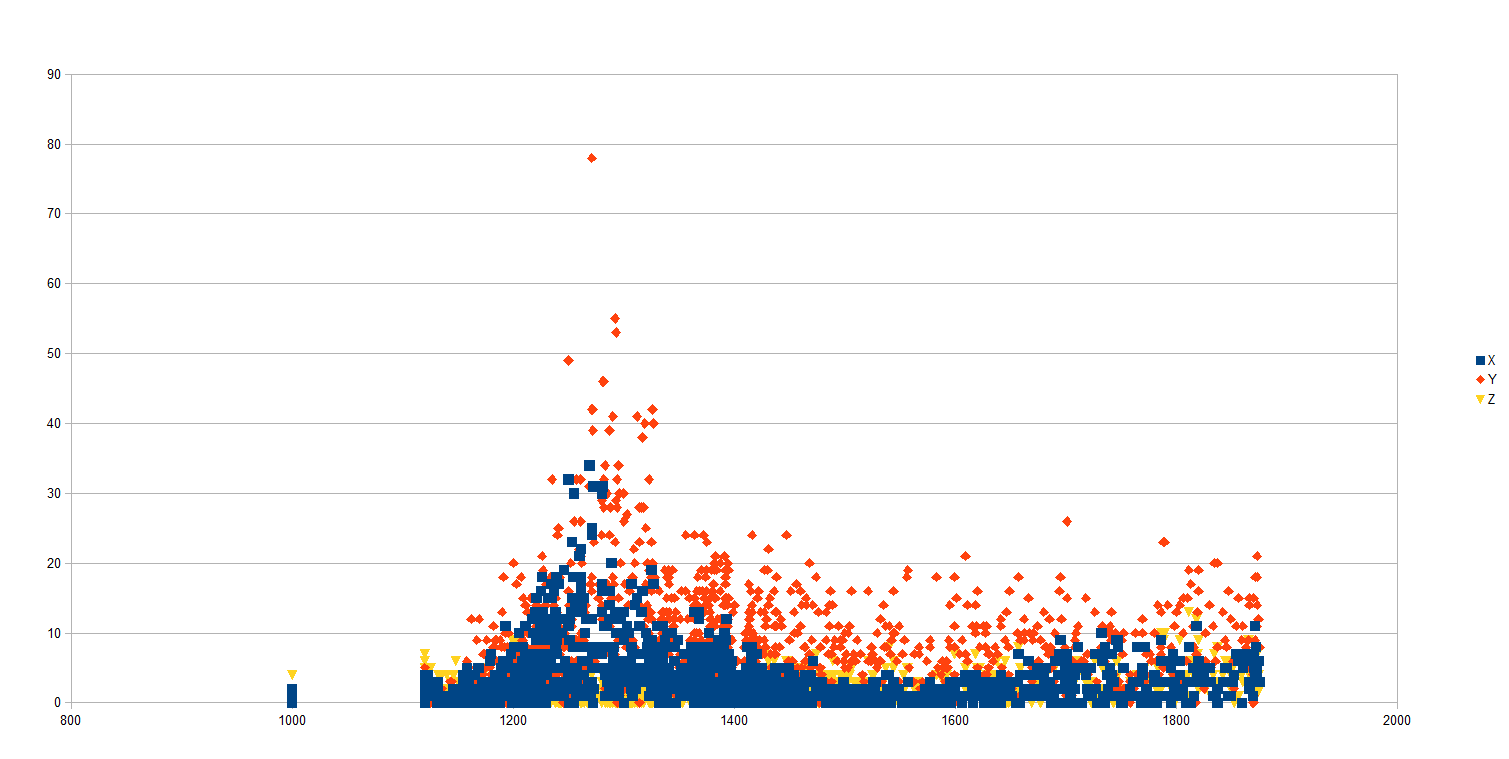
An den Gyros sind keine Daten die über das Sensorrauschen hinweggehen messbar..
Da nur die Gyros zum Regeln im AcroMode verwendet werden, müsste das ja dann eigentlich alles unproblematisch sein... Oder benutzt das Ding irgendeine Sensorfusion?
Ich fliege natürlich im AcroMode und nicht im StableMode um zu testen!
X-Achse = ESC-Steuerbefehl
Y-Achse = Vibrationen in der betrefenden Achse (verschiedene Werteskala beachten)
Ohne Dämpfer am Motor:
Mit Dämpfer am Motor:
An den Gyros sind keine Daten die über das Sensorrauschen hinweggehen messbar..
Da nur die Gyros zum Regeln im AcroMode verwendet werden, müsste das ja dann eigentlich alles unproblematisch sein... Oder benutzt das Ding irgendeine Sensorfusion?
Ich fliege natürlich im AcroMode und nicht im StableMode um zu testen!
So habe jetzt die Dämpfer mal eingebaut und den ersten richtigen Flug mit dem Copter gehabt.. Davor war das so gut wie nicht möglich, da der ganze Rahmen einer Dauervibration ausgesetzt war.
Der Copter fliegt nach meinem empfinden super! Ich habe ihn erst 1-2 minuten kampfgeschwebt, bis auf das er natürlich immer mal in irgend eine Richtung in die man zuletzt geflogen ist leicht abdriftet (ca. 1m in 3-5 sekunden drift) steht das Ding so gut wie auf der Stelle in der Luft.
Bin dann in dem kleinen Grünstreifen zwischen Häusern in dem ich fliegen war 1-2x rauf und runtergeflogen und habe sogar in etwas höhe einen Überschlag hinbekommen.
Die Props die ich gerade drauf hab sind aus der Schachtel und ungewichtet, man sieht sehr gut welches Prop gut gewichtet ist und welches nicht. Bei niedriegen Drehzahlen wackelte die Spitze des Propholders gut 5mm hin und her, aber die Steuerung kriegt davon nichts mit und es funktioniert trozdem 1A. Klar das das auf Dauer die Lager des Motors killt.
Da ich noch nie Copter geflogen bin (nur Fläche und Copter auch nicht am Simmulator) war ich echt erstaunt wie gut die Dinger sich fliegen lassen. Das Einzige was mich extrem stört, ist das das Throttle so todes empflindlich ist, ich hatte immer wieder Übersteuerungen Meinerseits, der Copter war mit ca. 1m/sec am Fallen und ich ging so 10% hoch am Throttle, also eine minimale Bewegung, der Copter raste daraufhin innerhalb von 0,5sec mit ca. 1m/sec gen Himmel.. Der "Sweetspot" zum schweben ist sehr schwer zu treffen, ändert man nur minimal die Knüppelstellung ghet der Copter ab wie Schmitz Katze. Roll/Pitch hingegen sind für mein Empfinden ganz ok wenn man etwas sachte ist, hier könnte ich ja auch noch ne Expokurve im Multiwii einstellen oder an der Funke..
Aber wie zur Hölle kriegt ma das Throttle besser hin? Eine Expokurve wäre nicht wirklich sinnvoll, da ich so schon auf ca. 50% gehen muss um zu schweben, sprich das wäre dann genau am Knick und würde sich gegenteilig auswirken.
Der Copter fliegt nach meinem empfinden super! Ich habe ihn erst 1-2 minuten kampfgeschwebt, bis auf das er natürlich immer mal in irgend eine Richtung in die man zuletzt geflogen ist leicht abdriftet (ca. 1m in 3-5 sekunden drift) steht das Ding so gut wie auf der Stelle in der Luft.
Bin dann in dem kleinen Grünstreifen zwischen Häusern in dem ich fliegen war 1-2x rauf und runtergeflogen und habe sogar in etwas höhe einen Überschlag hinbekommen.
Die Props die ich gerade drauf hab sind aus der Schachtel und ungewichtet, man sieht sehr gut welches Prop gut gewichtet ist und welches nicht. Bei niedriegen Drehzahlen wackelte die Spitze des Propholders gut 5mm hin und her, aber die Steuerung kriegt davon nichts mit und es funktioniert trozdem 1A. Klar das das auf Dauer die Lager des Motors killt.
Da ich noch nie Copter geflogen bin (nur Fläche und Copter auch nicht am Simmulator) war ich echt erstaunt wie gut die Dinger sich fliegen lassen. Das Einzige was mich extrem stört, ist das das Throttle so todes empflindlich ist, ich hatte immer wieder Übersteuerungen Meinerseits, der Copter war mit ca. 1m/sec am Fallen und ich ging so 10% hoch am Throttle, also eine minimale Bewegung, der Copter raste daraufhin innerhalb von 0,5sec mit ca. 1m/sec gen Himmel.. Der "Sweetspot" zum schweben ist sehr schwer zu treffen, ändert man nur minimal die Knüppelstellung ghet der Copter ab wie Schmitz Katze. Roll/Pitch hingegen sind für mein Empfinden ganz ok wenn man etwas sachte ist, hier könnte ich ja auch noch ne Expokurve im Multiwii einstellen oder an der Funke..
Aber wie zur Hölle kriegt ma das Throttle besser hin? Eine Expokurve wäre nicht wirklich sinnvoll, da ich so schon auf ca. 50% gehen muss um zu schweben, sprich das wäre dann genau am Knick und würde sich gegenteilig auswirken.
- Status
- Nicht offen für weitere Antworten.

