
Hi Leute,
ich hab meinen Quadro Regler mit der BLHeli Firmware geflashed.
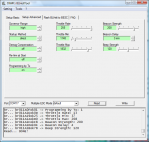
Die Firmware ist drauf, die MOtoren piepsen schön beim Start aber leider laufen sie nicht richtig an.
Sie stottern und drehen nur einer sehr langsam los.
Ich habe mal die default Einstellung ausgelesen, hat jemand einen Tip für mich was ich ändern sollte?
Danke und Gruß
Oti
ich hab meinen Quadro Regler mit der BLHeli Firmware geflashed.
Die Firmware ist drauf, die MOtoren piepsen schön beim Start aber leider laufen sie nicht richtig an.
Sie stottern und drehen nur einer sehr langsam los.
Ich habe mal die default Einstellung ausgelesen, hat jemand einen Tip für mich was ich ändern sollte?
Danke und Gruß
Oti
Anhänge
-
 54,8 KB Aufrufe: 32
54,8 KB Aufrufe: 32 -
 62,9 KB Aufrufe: 32
62,9 KB Aufrufe: 32 -
 62,2 KB Aufrufe: 44
62,2 KB Aufrufe: 44



