Hallo,
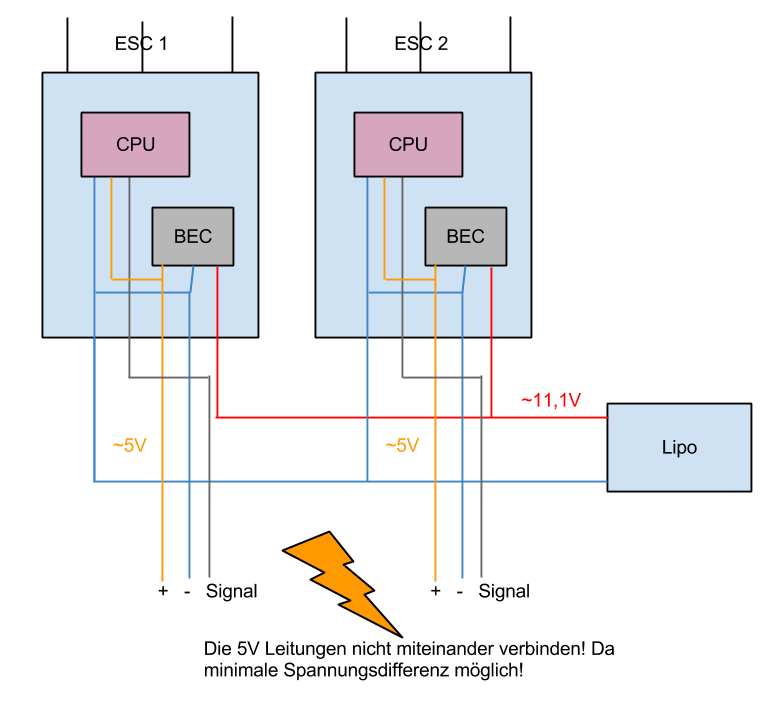
ich bin gerade dabei, meinen Quadrocopter einzustellen. Als FlightControl benutze ich die MW32 von Flyduino. Als Regler die "Flyduino NFET (HEXFET) 20A ESC SimonK Firmware". Von der Helifliegerei bin ich es gewöhnt nur einen Regler zu verwenden. Beim Quadrocopter benötige ich ja 4. Wenn ich die 4 Regler jetzt in das MW32 Stecke, sind sie aber parallel geschaltet. Normal muss ich doch dann bei 3 das rote Kabel durchtrennen, oder muss ich das hier nicht?
Jetzt habe ich noch eine Frage zur richtigen Einstellung des Senders. Ich verwende einen Futaba T8FG. Für den Quadrocopter muss ich ein neues Modell anlegen und zwar Heli, H-1? Wenn ich nun im Servomonitor die Kanäle anschaue, haben Pitch und Gas den gleichen Weg. Gas muss ich ja noch invertieren, da Futaba Was muss ich jetzt beim MW32 an Pitch, Throttle, Roll und Yaw anschließen?
Was muss ich jetzt beim MW32 an Pitch, Throttle, Roll und Yaw anschließen?
Gruß
Felix
ich bin gerade dabei, meinen Quadrocopter einzustellen. Als FlightControl benutze ich die MW32 von Flyduino. Als Regler die "Flyduino NFET (HEXFET) 20A ESC SimonK Firmware". Von der Helifliegerei bin ich es gewöhnt nur einen Regler zu verwenden. Beim Quadrocopter benötige ich ja 4. Wenn ich die 4 Regler jetzt in das MW32 Stecke, sind sie aber parallel geschaltet. Normal muss ich doch dann bei 3 das rote Kabel durchtrennen, oder muss ich das hier nicht?
Jetzt habe ich noch eine Frage zur richtigen Einstellung des Senders. Ich verwende einen Futaba T8FG. Für den Quadrocopter muss ich ein neues Modell anlegen und zwar Heli, H-1? Wenn ich nun im Servomonitor die Kanäle anschaue, haben Pitch und Gas den gleichen Weg. Gas muss ich ja noch invertieren, da Futaba
Was muss ich jetzt beim MW32 an Pitch, Throttle, Roll und Yaw anschließen?Gruß
Felix