Hallo zusammen,
ich bin noch relativ frisch mit dem APM und wurschtel mich immer noch (und immer wieder) durch verschiedene Dokus. Ich denke grob verstehe ich das Board mittlerweile auch ganz gut.
Ich habe gestern bei nicht allzubestem Wetter versucht, mit der RC7 die PIDs per Autotune einzustellen. Dabei hatte ich ein paar Probleme und habe es schlussendlich abgebrochen.
Generell driftete der Copter relativ schnell weg, daher zuvor noch eine allgemeine Frage. Macht es Sinn, vorher das Autolevel einzurichten, so dass der Copter sich selber trimmt (und erst dann Autotune?)
Nun zum eigentlichen Problem. Ich hatte 2 mal beim Autotune, dass der Copter in den RTL Modus wechselte oder zumindest nichtmehr auf die Eingaben an der Fernsteuerung reagierte bis ich den Flugmodus manuell durchgeschaltet hatte (von Stable auf Loiter und zurück auf stable). Zeitgleich dazu hatte ich auch Telemetrie über Andropilot an und habe zumindest auch gehört, dass er den Flugmodus wechselt (leider habe ich nicht verstanden, in welchen Modus, da ich das Handy in der Tasche hatte).
Ich versuche jetzt gerade anhand der Logs nachzuvollziehen, was da los war. Ich vermute, dass meine 2,4Ghz Telemtrie Antennen vom RCTimer nicht die passenden sind ( also ich weiß es, aber ich denke dass hier der Failsafe ausgelöst wurde). Nur verstehe ich nicht, wie ich das in den Logs sehen könnte.
Mag mir jemand helfen?
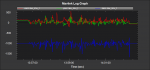
Im Anhang das Log vom Autotune
http://www7.zippyshare.com/v/6655190/file.html
Also man sieht im Log, dass er einmal in Land und einmal in RTL wechselt. Beides ist nicht von mir geschaltet gewesen, sondern nur die darauf folgenden Modi wechsel:
ich bin noch relativ frisch mit dem APM und wurschtel mich immer noch (und immer wieder) durch verschiedene Dokus. Ich denke grob verstehe ich das Board mittlerweile auch ganz gut.
Ich habe gestern bei nicht allzubestem Wetter versucht, mit der RC7 die PIDs per Autotune einzustellen. Dabei hatte ich ein paar Probleme und habe es schlussendlich abgebrochen.
Generell driftete der Copter relativ schnell weg, daher zuvor noch eine allgemeine Frage. Macht es Sinn, vorher das Autolevel einzurichten, so dass der Copter sich selber trimmt (und erst dann Autotune?)
Nun zum eigentlichen Problem. Ich hatte 2 mal beim Autotune, dass der Copter in den RTL Modus wechselte oder zumindest nichtmehr auf die Eingaben an der Fernsteuerung reagierte bis ich den Flugmodus manuell durchgeschaltet hatte (von Stable auf Loiter und zurück auf stable). Zeitgleich dazu hatte ich auch Telemetrie über Andropilot an und habe zumindest auch gehört, dass er den Flugmodus wechselt (leider habe ich nicht verstanden, in welchen Modus, da ich das Handy in der Tasche hatte).
Ich versuche jetzt gerade anhand der Logs nachzuvollziehen, was da los war. Ich vermute, dass meine 2,4Ghz Telemtrie Antennen vom RCTimer nicht die passenden sind ( also ich weiß es, aber ich denke dass hier der Failsafe ausgelöst wurde). Nur verstehe ich nicht, wie ich das in den Logs sehen könnte.
Mag mir jemand helfen?
Im Anhang das Log vom Autotune
http://www7.zippyshare.com/v/6655190/file.html
Also man sieht im Log, dass er einmal in Land und einmal in RTL wechselt. Beides ist nicht von mir geschaltet gewesen, sondern nur die darauf folgenden Modi wechsel:
Zuletzt bearbeitet:

")