
Hallo zusammen
Vieleicht haben es schon ein paar von euch gesehen. Habe nämlich im Englischen Forum einen ähnlichen Post gemacht aber denke ihr seit evtl. auch daran interessiert.
Also hier zuerst ein mal ein paar Bilder:


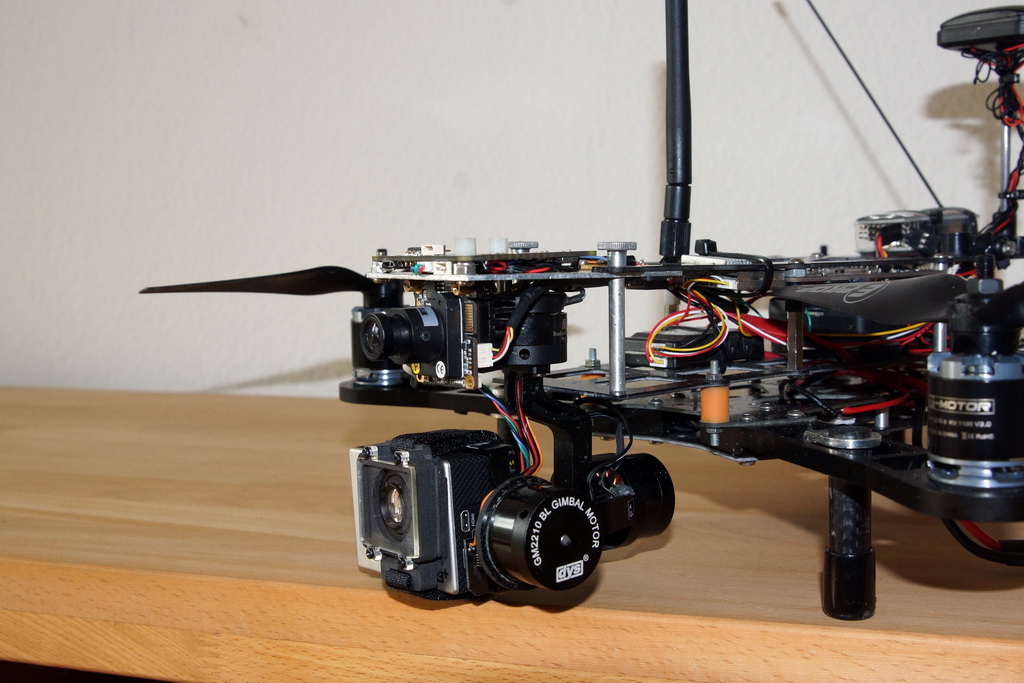
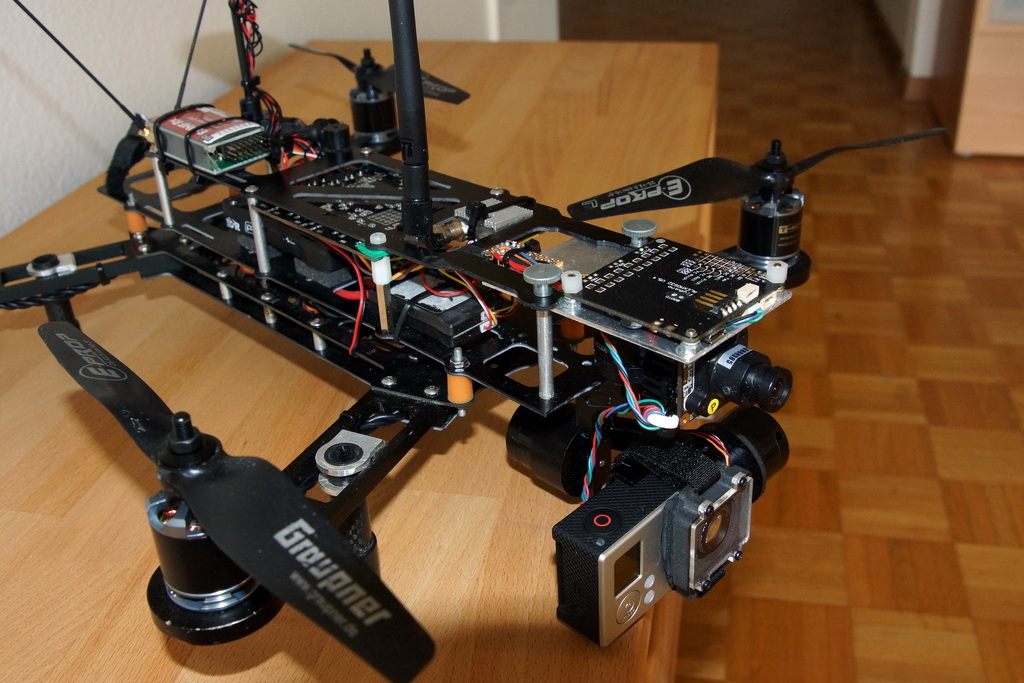

Es ein DYS 3 Axis gimbal mit dem neuen AlexMos 32 Bit board welches ich vor ein paar Wochen erhalten habe. Es funktioniert sehr gut und der Akku der GoPro lässt sich wunderbar vom Board direkt laden.
Mit nur zwei Rändelschrauben kann der Gimbal vom QAV400 abgenommen werden. Mann muss nicht einmal den Stecker für den Strom, video out, gimbal PWM etc. entstöpseln weil das automatisch geschieht sobald man das board nach vorne wegzieht.
Es ist ein 4x3 pin header welcher bei all meinen Quads etc. immer gleich aufgebaut ist damit die Gimbals unter den verschiedenen Vehikeln getauscht werden kann.
Weil ich gerade alles für die Ferien vorbereite habe ich bis jetzt nur ein Video auf YouTube gestellt. Wir waren mit einer Musik Gruppe filmen welche Luftaufnahmen für ihren Musikvideo haben wollte. Habe aus dem Material mal was zusammen geschnitten:
[video=youtube;pu4scjeRMT4]https://www.youtube.com/watch?v=pu4scjeRMT4[/video]
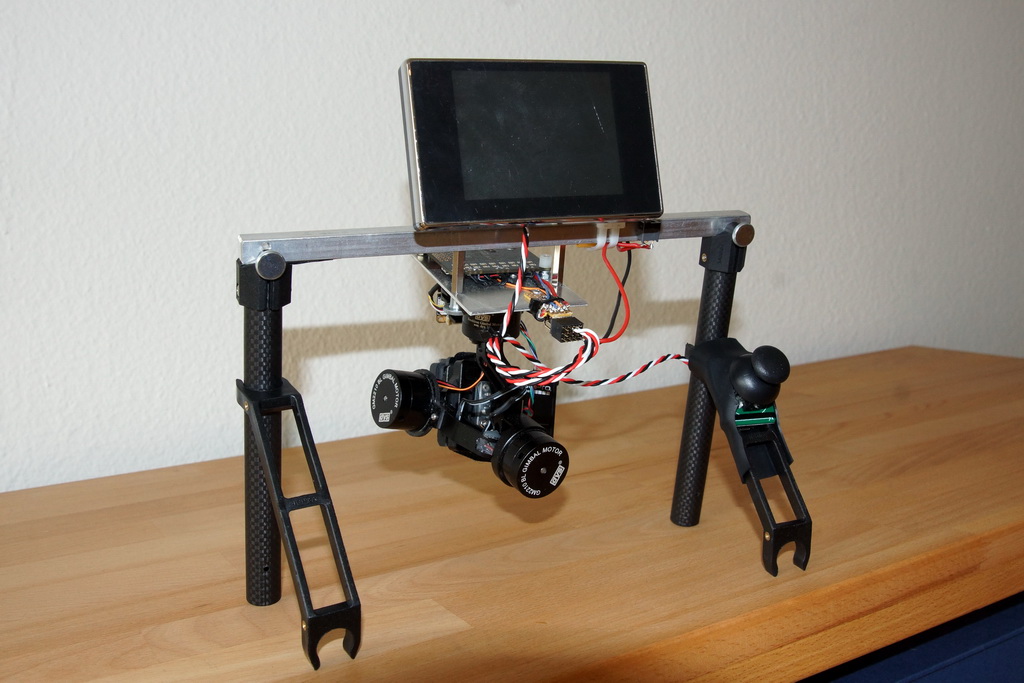
Weil ich auch am "Boden" filme habe ich mir noch einen Handheld Rig gebastelt wo ich das Modul welches ich vom QAV400 wegnehmen kann direkt mit den selben schrauben an die Handheld Konstruktion befestigen kann.
Oben hat es noch einen kleinen Monitor damit ich auch sehe was die GoPro filmt. Rechts hats noch einen kleinen Joystick womit sich die GoPro in der Pitch und Yaw Achse kontrollieren lässt.

Ich hoffe euch gefällts bin gespannt auf eure Kommentare!
Falls ihr fragen habt, einfach fragen.
Gruss
Andi
Vieleicht haben es schon ein paar von euch gesehen. Habe nämlich im Englischen Forum einen ähnlichen Post gemacht aber denke ihr seit evtl. auch daran interessiert.
Also hier zuerst ein mal ein paar Bilder:
Es ein DYS 3 Axis gimbal mit dem neuen AlexMos 32 Bit board welches ich vor ein paar Wochen erhalten habe. Es funktioniert sehr gut und der Akku der GoPro lässt sich wunderbar vom Board direkt laden.
Mit nur zwei Rändelschrauben kann der Gimbal vom QAV400 abgenommen werden. Mann muss nicht einmal den Stecker für den Strom, video out, gimbal PWM etc. entstöpseln weil das automatisch geschieht sobald man das board nach vorne wegzieht.
Es ist ein 4x3 pin header welcher bei all meinen Quads etc. immer gleich aufgebaut ist damit die Gimbals unter den verschiedenen Vehikeln getauscht werden kann.
Weil ich gerade alles für die Ferien vorbereite habe ich bis jetzt nur ein Video auf YouTube gestellt. Wir waren mit einer Musik Gruppe filmen welche Luftaufnahmen für ihren Musikvideo haben wollte. Habe aus dem Material mal was zusammen geschnitten:
[video=youtube;pu4scjeRMT4]https://www.youtube.com/watch?v=pu4scjeRMT4[/video]
Weil ich auch am "Boden" filme habe ich mir noch einen Handheld Rig gebastelt wo ich das Modul welches ich vom QAV400 wegnehmen kann direkt mit den selben schrauben an die Handheld Konstruktion befestigen kann.
Oben hat es noch einen kleinen Monitor damit ich auch sehe was die GoPro filmt. Rechts hats noch einen kleinen Joystick womit sich die GoPro in der Pitch und Yaw Achse kontrollieren lässt.
Ich hoffe euch gefällts bin gespannt auf eure Kommentare!
Falls ihr fragen habt, einfach fragen.
Gruss
Andi
")

