Hallo Leute,
ich bin gerade etwas ratlos wie ich die Regelparameter meiner Wookong an einem X8 optimieren kann. Bin bisher mit den Standardeinstellungen geflogen was für den Normalflug und Steigflug einwandfrei funktioniert. Beim Sinkflug schaukelt sich das System aber auf bis zum Gau.
Meine Kopterdaten:
Quadframe Kopter 25mm
Quadframe Landegestell 310mm
Wookong-M mi iOSD
Unilog2
8x TMotor 4010 475kv
8x Hobbywing 30 pro
8x RC-Timer 15" x 5,5"
KamKop Brushless Gimbel S mit Nex5R
4x 5S5000 verteilt an den Landegestellbeinen
Abflug-Gewicht ca. 6,7kg
Die Akkukonfiguration ist so weit außen montiert sicherlich suboptimal und ich werde nun umrüsten auf Akkuzentralmontage direkt oberhalb des Gimbals. Im manuellen Mode habe ich schon festgestellt, dass es mit der aktuellen Akkukonfig viel schwieriger ist den Kopter zu stabilisieren als mit einem zentralen Akkupack. In der neuen Konfig wird der Kopter dann auch "nur" noch 6kg wiegen.
Ursprünglich war der Kopter als X4 konfiguriert, da hatte ich das selbe Problem, habe unter anderem auch deshalb auf X8 aufgerüstet.
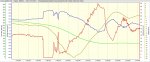
Beim Auslesen des iOSD kann man übrigens richtig schön sehen, wie die Regelung instabil wird.
Ich habe nicht vor mit dem Kopter zu heizen, aber ein Sinkflug (auch senkrecht im eigenen Downwash) mit mehr als 2m/s sollte möglich sein. Wie gesagt, sind die Gain-Parameter bisher unverändert. Wie sollte ich daran gehen, diese zu optimieren. Für jegliche Tipps bin ich dankbar.
Gruss Kai
ich bin gerade etwas ratlos wie ich die Regelparameter meiner Wookong an einem X8 optimieren kann. Bin bisher mit den Standardeinstellungen geflogen was für den Normalflug und Steigflug einwandfrei funktioniert. Beim Sinkflug schaukelt sich das System aber auf bis zum Gau.
Meine Kopterdaten:
Quadframe Kopter 25mm
Quadframe Landegestell 310mm
Wookong-M mi iOSD
Unilog2
8x TMotor 4010 475kv
8x Hobbywing 30 pro
8x RC-Timer 15" x 5,5"
KamKop Brushless Gimbel S mit Nex5R
4x 5S5000 verteilt an den Landegestellbeinen
Abflug-Gewicht ca. 6,7kg
Die Akkukonfiguration ist so weit außen montiert sicherlich suboptimal und ich werde nun umrüsten auf Akkuzentralmontage direkt oberhalb des Gimbals. Im manuellen Mode habe ich schon festgestellt, dass es mit der aktuellen Akkukonfig viel schwieriger ist den Kopter zu stabilisieren als mit einem zentralen Akkupack. In der neuen Konfig wird der Kopter dann auch "nur" noch 6kg wiegen.
Ursprünglich war der Kopter als X4 konfiguriert, da hatte ich das selbe Problem, habe unter anderem auch deshalb auf X8 aufgerüstet.
Beim Auslesen des iOSD kann man übrigens richtig schön sehen, wie die Regelung instabil wird.
Ich habe nicht vor mit dem Kopter zu heizen, aber ein Sinkflug (auch senkrecht im eigenen Downwash) mit mehr als 2m/s sollte möglich sein. Wie gesagt, sind die Gain-Parameter bisher unverändert. Wie sollte ich daran gehen, diese zu optimieren. Für jegliche Tipps bin ich dankbar.
Gruss Kai