
Hallo, ich hatte einen Absturz. Wollte gerade landen, da gibt der Quad Vollgas und haut ab.
Ich vermute ein ESC ist ausgestiegen, und die anderen 3 Antriebe haben versucht das auszugleichen.
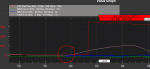
Kann man so etwas in der Logdatei sehen, warum der plötzlich Gas gegeben hat?
Ich habe auch noch ein Video von der ganzen Geschichte.
https://dl.dropboxusercontent.com/u/4382598/Crash.mpg
Hier noch der Link zur Logdatei: https://dl.dropboxusercontent.com/u/4382598/2016-05-07 20-10-36.bin
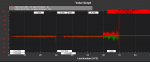
Kann man den ausgefallenen ESC anhand der Aufzeichnungen ausfindig machen?
Ich vermute ein ESC ist ausgestiegen, und die anderen 3 Antriebe haben versucht das auszugleichen.
Kann man so etwas in der Logdatei sehen, warum der plötzlich Gas gegeben hat?
Ich habe auch noch ein Video von der ganzen Geschichte.
https://dl.dropboxusercontent.com/u/4382598/Crash.mpg
Hier noch der Link zur Logdatei: https://dl.dropboxusercontent.com/u/4382598/2016-05-07 20-10-36.bin
Kann man den ausgefallenen ESC anhand der Aufzeichnungen ausfindig machen?


")

