
X8 und Arducopter => eine gefährliche Kombination..
- Themenstarter buckker
- Beginndatum


war tatsächlich eine ausführliche erklärung.
gemäß einem vorposter: ab ans reißbrett mit der pendeluhr")
gemäß einem vorposter: ab ans reißbrett mit der pendeluhr
Nicht's überstürzen, du hast ja gelesen, dass das Problem nur im AltHold auftritt und sonst nicht. Somit klar ein Flightcontrollerproblem.
So wie's aussieht ist's ein Prioritätenproblem im AltHold Modus. Schau mal hier rein: https://github.com/ArduPilot/ardupilot/issues/4210
Ich denke, dass ich mit meinem Design nicht komplett falsch liege. Alles hat seine Vor- und Nachteile. Die DJI S800 bis 1000 sind die genau gleichen Pendeluhren, scheinen disbezüglich aber keine Probleme zu machen.
Ich hatte mal in einer Nacht- und Nebelaktion zusätzliche Akkus in einem Kopter unterbringen müssen. Der einzige Platz war unten am Landgestell. Zu unserem Erstauen war dies überhaup kein Problem. Sogar knapp 100km brachte die Kiste raus :-D
Grüss dich
Nicht's überstürzen, du hast ja gelesen, dass das Problem nur im AltHold auftritt und sonst nicht. Somit klar ein Flightcontrollerproblem.
So wie's aussieht ist's ein Prioritätenproblem im AltHold Modus. Schau mal hier rein: https://github.com/ArduPilot/ardupilot/issues/4210
Nicht's überstürzen, du hast ja gelesen, dass das Problem nur im AltHold auftritt und sonst nicht. Somit klar ein Flightcontrollerproblem.
So wie's aussieht ist's ein Prioritätenproblem im AltHold Modus. Schau mal hier rein: https://github.com/ArduPilot/ardupilot/issues/4210
Wenn der AltHold-Controller feststellt, dass es z.B. beim dynamischen Abbremsen ungewollt nach oben geht, befiehlt er dem Lageregler, in der Summe vom Gas zu gehen. Das hat niedrigere Prop-Drehzahlen zur Folge, womit wiederum die Lageregelungsauthorität abnimmt. Die Folge sind die gezeigten Überschwinger. Mit anderen Worten: die Lageregelung schafft es nicht mehr, das Schwerpunktproblem zu überwinden, wenn nicht genug Gas anliegt.
Würdest Du im manuellen Modus genauso gut steuern wie der AltHold-Controller, würdest Du in das gleiche Problem laufen. Da der menschliche Pilot am Boden das aber in der Regel nicht hinbekommt, ist das Problem verdeckt und nicht sichtbar.
PS.: ein Hauptfaktor, warum die sehr tiefe Schwerpunktlage bei S800 und Artverwandten überhaupt funktioniert, ist ihre s**mäßige Effizienz und das bleischwere Abfluggewicht dieser Kisten. Dadurch findet ein großer Teil des Fluges bei im Durchschnitt hohem Gaslevel statt. Würde man so eine Kiste bei gleicher Schwerpunktlage ordentlich auf Diät setzten, würde ein unfliegbares Biest herauskommen.
Zuletzt bearbeitet:
Die Frage ist halt wie genau das Höhe Signal ist... Der Barometer lässt sich ja bekanntlich recht schnell aus der Ruhe bringen... (Vibrationen, Luftdruckunterschiede durch Fahrwind u.s.w.) Aber ja, wenn der Flightcontroller das Gefühl hat zu steigen (obwohl dies nicht der Fall ist), kann es zu solchen Auswüchsen kommen..
Ihr seid immer noch alle herzlich dazu eingeladen mir den Versuch nachzumachen und zu beweisen, dass es bei Euch anders ist. Würde mich wirklich interessieren.
Meinst du nicht, das hohe Abluggewicht kommt vom relativ schweren Equipment? Klar leichter geht es immer. Ist halt kein Gopro Plausch Kopter mehr. Das Gesamtgewicht steigt halt mit schweren Objektiven und Kameras schnell an...
Ihr seid immer noch alle herzlich dazu eingeladen mir den Versuch nachzumachen und zu beweisen, dass es bei Euch anders ist. Würde mich wirklich interessieren.
Meinst du nicht, das hohe Abluggewicht kommt vom relativ schweren Equipment? Klar leichter geht es immer. Ist halt kein Gopro Plausch Kopter mehr. Das Gesamtgewicht steigt halt mit schweren Objektiven und Kameras schnell an...
das ist nicht entweder eine Flightcontroller-, Physik-, oder Reissbrettproblem ... die Diskussion darüber ist IMHO wenig zielführend
wenn dann ist's alles zugleich, das Gesamtdesign bestehend aus den tausend Einzelaspekten passt nicht zusammen
nachdem jetzt ja klar scheint was das Problem ist, das nicht für alle angeforderten Flugbewegungen ausreichend Leistung da ist, ergeben sich nämlich ein Fülle von Lösungsansätze
* man könnte die möglichen Steuereingaben entschleunigen, wie vorgeschlagen
* man könnte die Balance von Att und Alt Controller verändern, auch wie vorgeschlagen
* man könnte das COG verändern, auch wie vorgeschlagen
* man könnte den Alt Controller einfach "langsamer"/"weniger aggresiv" machen
* man könnte einfach mehr Leistung zur Verfügung stellen, durch "größere" Motoren, höhere Battriespannung, usw.
und wahrscheinlich noch X mehr die mir nicht in den Sinn kommen
es ist IMHO inkorrekt zu schliessen dass das "Problem" nur in AltHold auftritt, ich denke es ist umgekehrt, das "Problem" tritt immer auf nur in Stabilize nicht ...
bei mir ist das anders, mir ist jedenfalls nie irgendetwas ähnliches aufgefallen, ich denke es liegt eindeutig an deinem Gesamtsystem
jetzt habe ich glaube ich genug Senf dazugegeben LOL
wenn dann ist's alles zugleich, das Gesamtdesign bestehend aus den tausend Einzelaspekten passt nicht zusammen
nachdem jetzt ja klar scheint was das Problem ist, das nicht für alle angeforderten Flugbewegungen ausreichend Leistung da ist, ergeben sich nämlich ein Fülle von Lösungsansätze
* man könnte die möglichen Steuereingaben entschleunigen, wie vorgeschlagen
* man könnte die Balance von Att und Alt Controller verändern, auch wie vorgeschlagen
* man könnte das COG verändern, auch wie vorgeschlagen
* man könnte den Alt Controller einfach "langsamer"/"weniger aggresiv" machen
* man könnte einfach mehr Leistung zur Verfügung stellen, durch "größere" Motoren, höhere Battriespannung, usw.
und wahrscheinlich noch X mehr die mir nicht in den Sinn kommen
es ist IMHO inkorrekt zu schliessen dass das "Problem" nur in AltHold auftritt, ich denke es ist umgekehrt, das "Problem" tritt immer auf nur in Stabilize nicht ...
bei mir ist das anders, mir ist jedenfalls nie irgendetwas ähnliches aufgefallen, ich denke es liegt eindeutig an deinem Gesamtsystem
jetzt habe ich glaube ich genug Senf dazugegeben LOL
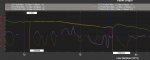
Ich konnte heute Abend noch zwei Akkuladungen fliegen. Als erstes habe ich wie von RL auf GiHub vorgeschlagen den ATC_ACCEL_P_MAX /ATC_ACCEL_R_MAX auf 72000 reduziert. Rein fliegerisch fühlt sicher Kopter weicher und angenehmer an. Beim Bremsmanöver konnte ich einmal ein massives Überschiessen provozieren. Das plötzliche nach hinten Abkippen kam wieder erst nach vielleicht 1 Sekunde in der Horizonalen. Der Kopter fühlte sich plötzlich sauträge und nicht mehr steuerbar an. Deshalb habe ich den Notausgang gewählt und bin zurück in den Stabilize gewechselt. Sofort war das knacke Flugverhalten wieder da..
Ausschnitt des Logs:
Später habe ich sonst noch an den Roll und Pitch PID Werten rumgespielt. Wirklich besser wurde die Sache nicht. Einzig nach dem dem Ändern des EKF_ALT_NOISE Wertes von 5 auf 1 war gefühlt besser. Um zu Verifizieren ob's dies wirklich die Lösung ist, muss ich nochmals ein Paar Flüge machen.
Randy hat noch erwähnt, dass ev. an den THR_MIX_MIN und THR_MIX_MAX geschraubt werden kann. Werden die Werte erhöht, wird dem Höhencontroller mehr Gewichtung gegeben. Genau dies will ich ja nicht. Dummerweise sind die Werte schon auf dem Minimum, also keine Möglichkeit noch was hier zu schrauben.
Nun hoffe ich den "Parameter des Verderbens" noch zu finden
Gruss Michael
Ausschnitt des Logs:
Später habe ich sonst noch an den Roll und Pitch PID Werten rumgespielt. Wirklich besser wurde die Sache nicht. Einzig nach dem dem Ändern des EKF_ALT_NOISE Wertes von 5 auf 1 war gefühlt besser. Um zu Verifizieren ob's dies wirklich die Lösung ist, muss ich nochmals ein Paar Flüge machen.
Randy hat noch erwähnt, dass ev. an den THR_MIX_MIN und THR_MIX_MAX geschraubt werden kann. Werden die Werte erhöht, wird dem Höhencontroller mehr Gewichtung gegeben. Genau dies will ich ja nicht. Dummerweise sind die Werte schon auf dem Minimum, also keine Möglichkeit noch was hier zu schrauben.
Nun hoffe ich den "Parameter des Verderbens" noch zu finden
Gruss Michael

