Beta-Flight - Erfahrungen mit der Beta von CleanFlight 1.10 (BorisB Version)
EDIT 22.09.2015
Aktuelles Update der neuersten Versionen:
BorisB zum Setup am eigenen Copter (21.09.15)
BorisB Video mit dterm Noise
----------------------------------------------------------------------------
Ahoi,
Da das Thema in vielen Threads als Offtopic auftaucht, dachte ich mir, dass ein eigener Thread zu der Beta-Flight 1.10 vielleicht für manche hilfreich wäre.
Letzten Endes scheint es um die Einstellung folgender Parameter zu gehen:
set sync_gyro_to_loop = 1
// Boris Haupt Feature
set rc_smoothing = 1
// Boris Feature .. Interpolation des RC-Signales um für jeden Gyro-Berechnungszyklus einen validen PPM Signalpunkt zu haben
set gyro_lpf = 188
// -->siehe Post #3 und weitere von p911 hier ist ev. ein Setting von 188 realistischer hinsichtlich Möglichkeiten des FC ->saubereres Signal
set gyro_cut_hz = 60-100 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
set pterm_cut_hz =40-60 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
set dterm_cut_hz = 8-15 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
// bei den Filtern gilt: ->Exec: "sollte so klein wie nötig aber so groß wie möglich gewählt werden"
set looptime = 0
// mit dem wert "0" sagst du dem System, dass es "so schnell wie möglich" soll... in Verbindung mit dem sync_gyro_to_loop, gibt somit der gyro das Tempo vor --> Update looptime=0 bzw. kleiner 1000 kann derzeit Probleme mit den Dys Reglern bringen (siehe post #6)
set acc_hardware=1/0
// accelerometer mit Wert "1" ausschalten für looptimes so schnell es das System bzw. der gyro schafft (etwa 600+), dann aber nur acro... sonst etwa looptime bei 1600
zumindest hätte ich das so verstanden ... man möge mich bitte korrigieren, sollte das nicht passen.. bei mir fliegt er so sehr gut (controller luxfloat).
Quelle: Boris-Flight Thread RcGroups
!Wichtig!
- Die Filter (cut_hz) Werte sind keine globalen Variablen und binden sich jeweils an das PID-Profil (1,2,3)
- Wer früher einen cmix in Cleanflight eingegeben hatte, kann das auch weiterhin -> doch wird der "cmix" Befehl zu einem "mmix" und die Nummerierung der Motoren startet mit "0" und nicht wie bisher mit "1".
!Wichtig!
Wie sind eure Erfahrungen mit der Boris-Beta-Flight Version von CL 1.10?
Wie geht ihr mit den Filtern um?
puk
EDIT: Update aus User-Inputs in OP
EDIT 22.09.2015
Aktuelles Update der neuersten Versionen:
Summary:
- easy to no filter tuning. Thanks to qcopter. Use defaults and only change your pids. It is very very smooth! Charpu and a few other good testers just tried it and the feedback was great.
- No need to disable acc on f1 targets anymore. Yes I repeat even naze32 runs 1khz stable with acc+gyro. thanks to prodrone and few others for making this possible.
- Removed delta 3 point averaging on all pid controllers. D is now less delayed and more accurate. FIR filter just works like a charm.
- Looptime is removed. We simply don't need this tc bullsh**t anymore.
A lot of things and cleanups to do, but this is a good starting point.
- easy to no filter tuning. Thanks to qcopter. Use defaults and only change your pids. It is very very smooth! Charpu and a few other good testers just tried it and the feedback was great.
- No need to disable acc on f1 targets anymore. Yes I repeat even naze32 runs 1khz stable with acc+gyro. thanks to prodrone and few others for making this possible.
- Removed delta 3 point averaging on all pid controllers. D is now less delayed and more accurate. FIR filter just works like a charm.
- Looptime is removed. We simply don't need this tc bullsh**t anymore.
A lot of things and cleanups to do, but this is a good starting point.
Just tune the PID's on a traditional way and start with defaults.
Defaults for luxfloat and PID1 are really close to most of the quads I tried.
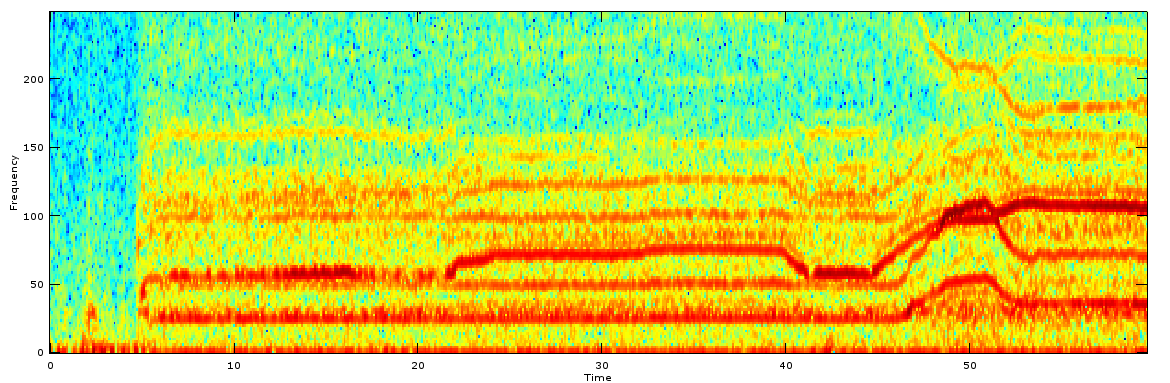
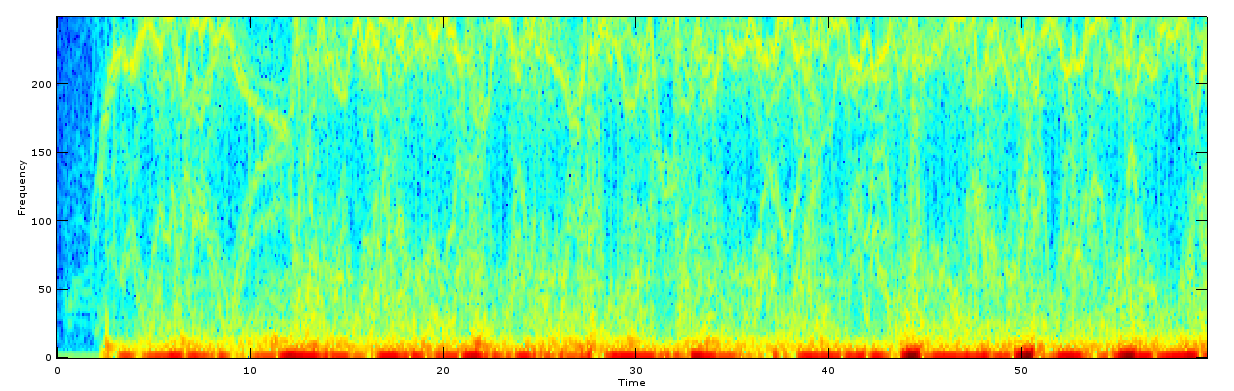
If you have blackbox you can check dterm for noise and tune that if not you can listen to the sound of motors on high throttle for an indication. That's why I posted the video few pages back.
First try to lower dterm to flyable levels. No need to have more D than necessary.
Default gyro filtering should be fine for all! Also pterm filtering is now only hardcoded only for yaw axis.
Defaults for luxfloat and PID1 are really close to most of the quads I tried.
If you have blackbox you can check dterm for noise and tune that if not you can listen to the sound of motors on high throttle for an indication. That's why I posted the video few pages back.
First try to lower dterm to flyable levels. No need to have more D than necessary.
Default gyro filtering should be fine for all! Also pterm filtering is now only hardcoded only for yaw axis.
This is how D noise sounds! I really couldn't hear that on the ground and couldn't check blackbox files. Gopro sound recording also never lies!
https://www.youtube.com/watch?v=I5H_l-pqDlQ
https://www.youtube.com/watch?v=I5H_l-pqDlQ
Ahoi,
Da das Thema in vielen Threads als Offtopic auftaucht, dachte ich mir, dass ein eigener Thread zu der Beta-Flight 1.10 vielleicht für manche hilfreich wäre.
Letzten Endes scheint es um die Einstellung folgender Parameter zu gehen:
set sync_gyro_to_loop = 1
// Boris Haupt Feature
set rc_smoothing = 1
// Boris Feature .. Interpolation des RC-Signales um für jeden Gyro-Berechnungszyklus einen validen PPM Signalpunkt zu haben
set gyro_lpf = 188
// -->siehe Post #3 und weitere von p911 hier ist ev. ein Setting von 188 realistischer hinsichtlich Möglichkeiten des FC ->saubereres Signal
set gyro_cut_hz = 60-100 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
set pterm_cut_hz =40-60 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
set dterm_cut_hz = 8-15 // Filter Startwert gut... anpassen nach persönlichen Bedürfnissen (siehe Post #5,#6)
// bei den Filtern gilt: ->Exec: "sollte so klein wie nötig aber so groß wie möglich gewählt werden"
set looptime = 0
// mit dem wert "0" sagst du dem System, dass es "so schnell wie möglich" soll... in Verbindung mit dem sync_gyro_to_loop, gibt somit der gyro das Tempo vor --> Update looptime=0 bzw. kleiner 1000 kann derzeit Probleme mit den Dys Reglern bringen (siehe post #6)
set acc_hardware=1/0
// accelerometer mit Wert "1" ausschalten für looptimes so schnell es das System bzw. der gyro schafft (etwa 600+), dann aber nur acro... sonst etwa looptime bei 1600
zumindest hätte ich das so verstanden ... man möge mich bitte korrigieren, sollte das nicht passen.. bei mir fliegt er so sehr gut (controller luxfloat).
Quelle: Boris-Flight Thread RcGroups
!Wichtig!
- Die Filter (cut_hz) Werte sind keine globalen Variablen und binden sich jeweils an das PID-Profil (1,2,3)
- Wer früher einen cmix in Cleanflight eingegeben hatte, kann das auch weiterhin -> doch wird der "cmix" Befehl zu einem "mmix" und die Nummerierung der Motoren startet mit "0" und nicht wie bisher mit "1".
!Wichtig!
Wie sind eure Erfahrungen mit der Boris-Beta-Flight Version von CL 1.10?
Wie geht ihr mit den Filtern um?
puk
EDIT: Update aus User-Inputs in OP
Zuletzt bearbeitet: