
Absturz im Loiter Mode
- Themenstarter DripleX
- Beginndatum
Also ich habe heute den Kompassmot durchgeführt.
Hier die Werte:
Es stand noch irgendeine Prozentzahl von ca. 30 % dort.
Sind die Werte okay, oder muss ich den Kompass/GPS wo anders befestigen?
Der Spannungssensor geht nun auch. Hatte den falsch angeschlossen.
Und noch was... Was ist denn ein guter HDOP Wert?
Ich weiß, um so niedriger desto besser... Ich hatte vorher beim Kompassmot einen von 1,3.
Hier die Werte:
COMPASS_MOT_X = 1,298905
COMPASS_MOT_Y = -1,411094
COMPASS_MOT_Z = -0,9700346
COMPASS_MOT_CT = 2 (Use Current)
COMPASS_MOT_Y = -1,411094
COMPASS_MOT_Z = -0,9700346
COMPASS_MOT_CT = 2 (Use Current)
Sind die Werte okay, oder muss ich den Kompass/GPS wo anders befestigen?
Der Spannungssensor geht nun auch. Hatte den falsch angeschlossen.
Und noch was... Was ist denn ein guter HDOP Wert?
Ich weiß, um so niedriger desto besser... Ich hatte vorher beim Kompassmot einen von 1,3.
Zuletzt bearbeitet:
Habe nun den Kompass/GPS wo anders montiert (siehe Bild) und den Kompassmot nochmals durchgeführt.
Nun schauen die Werte viel besser aus:
Und der Interferenz-Wert lag bei 6%.
Bild

Ich lade nun den Akku voll und werde dann später mal einen Testflug starten.
Oder muss ich noch irgendwas beachten / einstellen ?
Nun schauen die Werte viel besser aus:
Code:
COMPASS_MOT_X -0,312392
COMPASS_MOT_Y -0,1833348
COMPASS_MOT_Z 0,4807062
COMPASS_MOTCT 2
COMPASS_OFS_X -71
COMPASS_OFS_Y -73
COMPASS_OFS_Z 56Bild
Ich lade nun den Akku voll und werde dann später mal einen Testflug starten.
Oder muss ich noch irgendwas beachten / einstellen ?
Ich habe nun den ersten Flug hinter mir.
Hat alles super funktioniert.
Klar, ein bisschen tuning/trimming ist immer noch notwendig. Da es aber zu windig war, habe ich das mal gelassen.
Wegen der Vibration:


Die Y- und Z-Achse schauen ganz okay aus, oder?
Mit der X-Achse kann ich gar nichts anfangen...
Soll ich nun eine anti Vibrationsplatte wieder montieren, oder braucht es das nicht?
Hat alles super funktioniert.
Klar, ein bisschen tuning/trimming ist immer noch notwendig. Da es aber zu windig war, habe ich das mal gelassen.
Wegen der Vibration:
Die Y- und Z-Achse schauen ganz okay aus, oder?
Mit der X-Achse kann ich gar nichts anfangen...
Soll ich nun eine anti Vibrationsplatte wieder montieren, oder braucht es das nicht?
Kannst dir auch gerne selber anschauen:
Anhang anzeigen 2015-01-05 15-39-36.zip
Anhang anzeigen 2015-01-05 15-39-36.zip
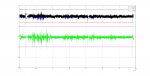
Habe nun die Daten analysiert. Es scheint so, als ob der APM einen Schreibfehler oder so gemacht hat.
Es war nur ein Wert sehr groß 1.163578E+25, weshalb auch das Diagramm gar nicht mehr gepasst hat.
Habe mir dann mal schnell ein Java-Programm erstellt, welche die X-, Y- und Z-Werte in eine Textdatei schreibt und dabei ganz große Werte aussortiert.
Danach lasse ich das ganze in Matlab plotten.
Hier das Ergebnis:
Es war nur ein Wert sehr groß 1.163578E+25, weshalb auch das Diagramm gar nicht mehr gepasst hat.
Habe mir dann mal schnell ein Java-Programm erstellt, welche die X-, Y- und Z-Werte in eine Textdatei schreibt und dabei ganz große Werte aussortiert.
Danach lasse ich das ganze in Matlab plotten.
Hier das Ergebnis:
Ich hab mal noch ne kurze Frage und wollte nicht extra dafür einen neuen Thread aufmachen.
Und zwar, wenn ich die Logs vom APM downloaden will, kann ich nicht erkennen, welches log von wann ist.
Die werden alle mit dem UNIX Startdatum von 01.01.1970 angezeigt, siehe Bild unten.
Ist das normal, oder kann man irgendwo ein Datum einstellen?
Erst wenn ich die Logs downloade, kann ich das Datum sehen.

Und zwar, wenn ich die Logs vom APM downloaden will, kann ich nicht erkennen, welches log von wann ist.
Die werden alle mit dem UNIX Startdatum von 01.01.1970 angezeigt, siehe Bild unten.
Ist das normal, oder kann man irgendwo ein Datum einstellen?
Erst wenn ich die Logs downloade, kann ich das Datum sehen.
Dann noch ne andere Frage zu Vibrationen.
Habe gestern den ersten Flug mit den neu verbauten Teilen gemacht.
Das "APM Flight Log Analysis" Tool zeigt mir an, dass die Vibrationen zu stark sind.
Was meint ihr?


Anhang anzeigen 2015-01-31 15-39-15.rar
Habe gestern den ersten Flug mit den neu verbauten Teilen gemacht.
Das "APM Flight Log Analysis" Tool zeigt mir an, dass die Vibrationen zu stark sind.
Was meint ihr?
Anhang anzeigen 2015-01-31 15-39-15.rar
Ja war alles sehr gut. Hab zwar noch nicht so viel Erfahrung, aber mir hat es gefallen.
War sehr stabil im loiter mode, Alt mode hat auch gut funktioniert und in stabilize mode war der auch sehr agil.
Will dann mal noch auto tune ausprobieren, wenn es mal windstill sein sollte, was momentan ja nicht danach aussieht.
Habe schon ein bisschen den P-Anteil getuned mit Hilfe der Anleitung von Ardupilot.
Bin mir eben nur nicht sicher, ob das mit den Vibrationen so in Ordnung geht.
Wie äußert sich denn der Copter, wenn der APM zu stark vibriert?
War sehr stabil im loiter mode, Alt mode hat auch gut funktioniert und in stabilize mode war der auch sehr agil.
Will dann mal noch auto tune ausprobieren, wenn es mal windstill sein sollte, was momentan ja nicht danach aussieht.
Habe schon ein bisschen den P-Anteil getuned mit Hilfe der Anleitung von Ardupilot.
Bin mir eben nur nicht sicher, ob das mit den Vibrationen so in Ordnung geht.
Wie äußert sich denn der Copter, wenn der APM zu stark vibriert?
Du merkst es spätestens im althold, weil da die z-achse dazu kommt.
Wenn es ganz schlimm ist, fangen die regler komisch an zu fiepen. Die fc versucht aufgrund der vibs zu regeln und gibt gasstöße raus.
Mach erstmal autotune.
Speicher ab und teste mal. Voll pitch und / oder roll und loslasssen. Zackig steigen und senkrecht runter. Das normale schaukeln im abwind kriegt die fc bei guten werten ganz gut weg.
Dann testest du mal loiter/poshols im wind und schaust wie er reagiert. Sind die Werte zu niedrig, hat er im wind zu wenig Kraft. Er schaukelt") .
.
Wenn es ganz schlimm ist, fangen die regler komisch an zu fiepen. Die fc versucht aufgrund der vibs zu regeln und gibt gasstöße raus.
Mach erstmal autotune.
Speicher ab und teste mal. Voll pitch und / oder roll und loslasssen. Zackig steigen und senkrecht runter. Das normale schaukeln im abwind kriegt die fc bei guten werten ganz gut weg.
Dann testest du mal loiter/poshols im wind und schaust wie er reagiert. Sind die Werte zu niedrig, hat er im wind zu wenig Kraft. Er schaukelt
.Heute war schönes Wetter, weshalb ich eine Autotune Durchlauf gemacht habe.
Folgende Werte sind dabei herausgekommen:

Anhang anzeigen 2015-02-07 16-07-53.rar
Schauen die Werte okay aus?
Konnte danach nicht mehr viel fliegen, da der Akku dann ziemlich schnell leer war, wegen der Kälte.
War aber vollkommen zufrieden mit den Flugeigenschaften.
Folgende Werte sind dabei herausgekommen:
Anhang anzeigen 2015-02-07 16-07-53.rar
Schauen die Werte okay aus?
Konnte danach nicht mehr viel fliegen, da der Akku dann ziemlich schnell leer war, wegen der Kälte.
War aber vollkommen zufrieden mit den Flugeigenschaften.

