
Der Meister unmerkbarer Namenskürzel (Kurz: Nick Arsov) und sein US Partner Phil Kocmoud haben, wie angekündigt, ihr 10s Powermodul mit der (unmotivierten?) Bezeichnung ACSP3 auf den Markt gebracht. Klangvolles liegt ihnen nicht.
Dafür sieht es aber gut aus :

Kam im Geschenkkarton mit Silikon Anschlußkabeln, die erfreulicherweise farblich korrekt gekennzeichnet sind.
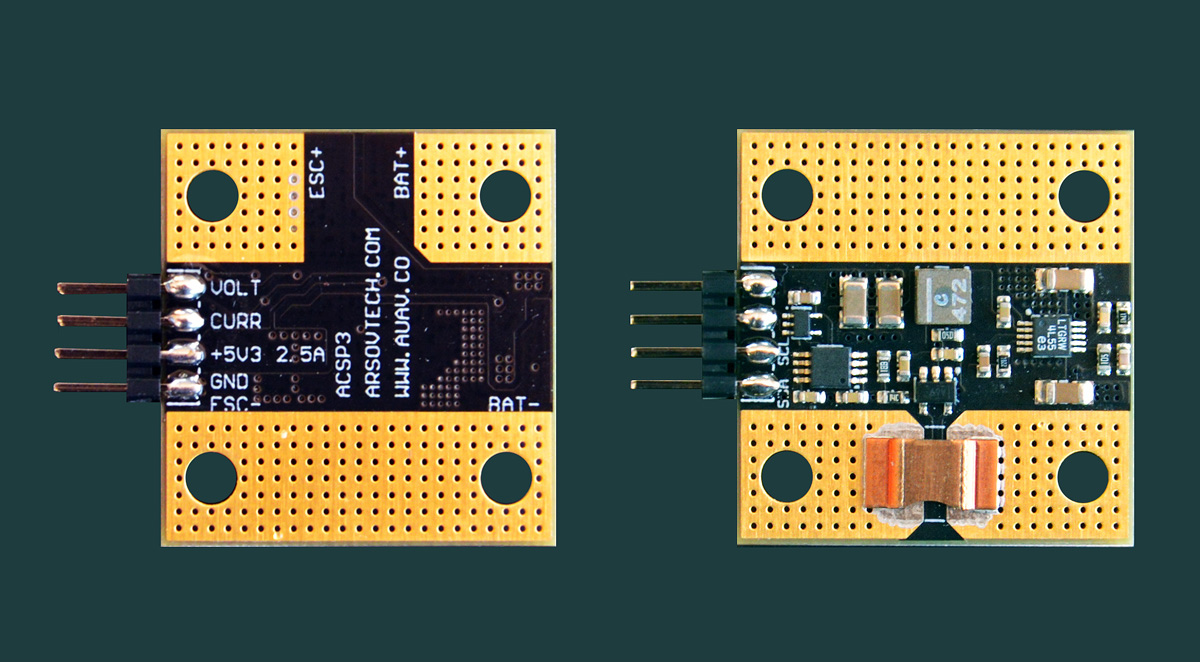
Wie vom AUAV-X2 gewohnt, erstklassig verarbeitet. Die unterschiedlichen Farben sind Schuld des Fotografen in Zeitnot..;-) Keine verfälschenden Lötzinn Schlampereien auf dem Shunt Widerstand, freilich muß man die Powerkabel selber anlöten. Die Löcher sind Durchkontaktierungen, damit das Board bei den angegebenen 90A auch nicht gegrillt wird.
Technische Daten (In Klammern meine Werte)
Vin max = 42VDC ( 10S ) (Stimmt)
Ishunt current (Max Strom)= 90A (Glaube ich, aber nicht probiert)
Vout = 5.4V (gemessen 5,29V)
Ioutmax = 2.25A with 3A burst (Bis 1,5A Dauer getestet)
Ultra low noise/ripple <10-12mV (Eher nicht mehr als 5mV)
Analog + I2C interface
Abmessungen: LxB 30x30mm, (H 3,7mm ohne Header, 5mm mit Header)
Verwendung:
Das Powermodul ist für alle Flight Controller auf PIXHAWK bzw. APM Basis geeignet.
Weiterhin bietet es ein I²C Interface für zukünftige Anwendungen
Bemerkenswert:
1. Das Powermodul kommt ohne große Induktivität aus und ist damit mechanisch sehr betriebssicher, denn diese fielen manchmal einfach ab. (Auch beim 3DR Original) .
2. Es ist extrem flach und damit einfach zu integrieren.
3. Der 5.3V Analog Ausgang wird mit dem Ultra Low Noise LT8609 (Linear Technology) realisiert, sicher einer besseren Regler auf dem Markt.
Fazit: Obwohl dieses Powermodul mit knapp 30$ nicht billig ist, lohnt der Kauf für bessere Copter.
Schluß mit Kistenschieberlotto, wo auch gerne mal 8V oder volle 4s am Ausgang anlagen und den Controller grillten.
Schluß mit abfallenden Ferriten, die (selbst bei 3DR RTF) für Brownouts ohne Re-Boot sorgten.
Schluß mit nachträglich anzulötenden Elkos, damit das Telemetrymodul endlich mal sauber startet.
Mir verspricht das ein Stück Sicherheit, gut verarbeitet zudem.... kaufen sag ich")
Dafür sieht es aber gut aus :
Kam im Geschenkkarton mit Silikon Anschlußkabeln, die erfreulicherweise farblich korrekt gekennzeichnet sind.
Wie vom AUAV-X2 gewohnt, erstklassig verarbeitet. Die unterschiedlichen Farben sind Schuld des Fotografen in Zeitnot..;-) Keine verfälschenden Lötzinn Schlampereien auf dem Shunt Widerstand, freilich muß man die Powerkabel selber anlöten. Die Löcher sind Durchkontaktierungen, damit das Board bei den angegebenen 90A auch nicht gegrillt wird.
Technische Daten (In Klammern meine Werte)
Vin max = 42VDC ( 10S ) (Stimmt)
Ishunt current (Max Strom)= 90A (Glaube ich, aber nicht probiert)
Vout = 5.4V (gemessen 5,29V)
Ioutmax = 2.25A with 3A burst (Bis 1,5A Dauer getestet)
Ultra low noise/ripple <10-12mV (Eher nicht mehr als 5mV)
Analog + I2C interface
Abmessungen: LxB 30x30mm, (H 3,7mm ohne Header, 5mm mit Header)
Verwendung:
Das Powermodul ist für alle Flight Controller auf PIXHAWK bzw. APM Basis geeignet.
Weiterhin bietet es ein I²C Interface für zukünftige Anwendungen
Bemerkenswert:
1. Das Powermodul kommt ohne große Induktivität aus und ist damit mechanisch sehr betriebssicher, denn diese fielen manchmal einfach ab. (Auch beim 3DR Original) .
2. Es ist extrem flach und damit einfach zu integrieren.
3. Der 5.3V Analog Ausgang wird mit dem Ultra Low Noise LT8609 (Linear Technology) realisiert, sicher einer besseren Regler auf dem Markt.
Fazit: Obwohl dieses Powermodul mit knapp 30$ nicht billig ist, lohnt der Kauf für bessere Copter.
Schluß mit Kistenschieberlotto, wo auch gerne mal 8V oder volle 4s am Ausgang anlagen und den Controller grillten.
Schluß mit abfallenden Ferriten, die (selbst bei 3DR RTF) für Brownouts ohne Re-Boot sorgten.
Schluß mit nachträglich anzulötenden Elkos, damit das Telemetrymodul endlich mal sauber startet.
Mir verspricht das ein Stück Sicherheit, gut verarbeitet zudem.... kaufen sag ich
Zuletzt bearbeitet:

