Hier wiederhole ich meine Behauptung, dass Autoquad zumindest im GPS Modus ein massives Softwareproblem hat.
Ich habe ja schon länger und mehrfach die Vermutung geäußert, dass AQ ein Softwarefehler hat. Zumindest gibt es im GPS mode ein massives Problem, welches mich heute erneut ein Kopter gekostet hat.
Es ist wirklich schade, habe gerade begonnen mich in Quatos einzuarbeiten aber wenn elementare Grundfunktionalitäten nicht funktionieren mach das kein Sinn.
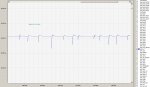
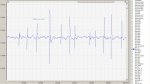
Das Problem im GPS mod ist, dass GPS Fehler, welche scheinbar unvermeidbar sind und welche mehr oder weniger häufig auftreten zu ungewollten Flugmanövern führen. Die unter Umständen bis zum Absturz führen.
Mag sein, dass es auch ein spezielles Hardwareproblem des M4 v2 Controlers ist, ein Deffekt eines einzelnen FC schließe ich aus, da das Problem mit allen 4 mir vorliegenden Exemplaren auftritt.
Das heute das GPS nicht besonders gut ist hätte ich vorher checken sollen.

Logs und Videos stelle ich bei Interesse gerne zur Verfügung.
VG Reiner
Ich habe ja schon länger und mehrfach die Vermutung geäußert, dass AQ ein Softwarefehler hat. Zumindest gibt es im GPS mode ein massives Problem, welches mich heute erneut ein Kopter gekostet hat.
Es ist wirklich schade, habe gerade begonnen mich in Quatos einzuarbeiten aber wenn elementare Grundfunktionalitäten nicht funktionieren mach das kein Sinn.
Das Problem im GPS mod ist, dass GPS Fehler, welche scheinbar unvermeidbar sind und welche mehr oder weniger häufig auftreten zu ungewollten Flugmanövern führen. Die unter Umständen bis zum Absturz führen.
Mag sein, dass es auch ein spezielles Hardwareproblem des M4 v2 Controlers ist, ein Deffekt eines einzelnen FC schließe ich aus, da das Problem mit allen 4 mir vorliegenden Exemplaren auftritt.
Das heute das GPS nicht besonders gut ist hätte ich vorher checken sollen.
Logs und Videos stelle ich bei Interesse gerne zur Verfügung.
VG Reiner