
Hallo zusammen,
heute hatte ich meinen ersten Flug und nur probleme, der erste Start war unkompliziert nach ca. 20 Sekunden piepste der Copter und ich landete nach dem er kein Gas mehr annahm, gute ich kontrolliere den Aku und kein Fehler gefunden, also wollte ich neu armen, aber ging nicht mehr, schwups per Mission Planer drauf gesehen aber auch kein Fehler erkennbar, Aku abgesteckt und wieder an und ich konnte ihn Armen, der Copter flog 30 meter weg Stieg dann auf ca. 30 Meter und lies sich nicht mehr steuern, vor lauter Panik habe ich dann RTL , Radio aus usw, er blieb einfach in der Luft und machte nichts, dann kam er in meine nähe zurück ich schnappte mir das Landegestell bei laufenden Motoren in der Luft und steckte den Aku ab, puh Glück gehabt.
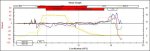
Zuhause habe ich die Logs ausgewerte und nur einen Fehler gesehen Err: FAILSAFE_BATT-1 und DIO-1 , blos was sagen die mir, denn der Aku hat noch 11,46V ( 3S ). -> Failsafe ist auf 10.5V eingestellt
Bitte um Hilfe
PS. AutoAnalyses sagt nur folgendes
Vielen Dank
heute hatte ich meinen ersten Flug und nur probleme, der erste Start war unkompliziert nach ca. 20 Sekunden piepste der Copter und ich landete nach dem er kein Gas mehr annahm, gute ich kontrolliere den Aku und kein Fehler gefunden, also wollte ich neu armen, aber ging nicht mehr, schwups per Mission Planer drauf gesehen aber auch kein Fehler erkennbar, Aku abgesteckt und wieder an und ich konnte ihn Armen, der Copter flog 30 meter weg Stieg dann auf ca. 30 Meter und lies sich nicht mehr steuern, vor lauter Panik habe ich dann RTL , Radio aus usw, er blieb einfach in der Luft und machte nichts, dann kam er in meine nähe zurück ich schnappte mir das Landegestell bei laufenden Motoren in der Luft und steckte den Aku ab, puh Glück gehabt.
Zuhause habe ich die Logs ausgewerte und nur einen Fehler gesehen Err: FAILSAFE_BATT-1 und DIO-1 , blos was sagen die mir, denn der Aku hat noch 11,46V ( 3S ). -> Failsafe ist auf 10.5V eingestellt
Bitte um Hilfe
PS. AutoAnalyses sagt nur folgendes
Code:
Log File C:/Users/Laptop/AppData/Local/Temp/tmpAAD7.tmp.log
Size (kb) 1197.775390625
No of lines 16751
Duration 0:01:09
Vehicletype ArduCopter
Firmware Version V3.2-rc9
Firmware Hash 75a1e46d
Hardware Type
Free Mem 0
Skipped Lines 0
Test: Autotune = UNKNOWN - No ATUN log data
Test: Balance/Twist = GOOD -
Test: Brownout = GOOD -
Test: Compass = FAIL - Large compass off params (X:-167.00, Y:-54.00, Z:103.00)
Large compass offset in MAG data:
X: -167.00
mag_field interference within limits (8.89%)
Test: Dupe Log Data = GOOD -
Test: Empty = GOOD -
Test: Event/Failsafe = FAIL - ERRs found: FS_BATT FS_THR
Test: GPS = WARN - Min satellites: 6, Max HDop: 3.16
Test: Parameters = GOOD -
Test: PM = GOOD -
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = GOOD -Anhänge
-
 52,4 KB Aufrufe: 28
52,4 KB Aufrufe: 28 -
 53 KB Aufrufe: 23
53 KB Aufrufe: 23 -
 66,1 KB Aufrufe: 26
66,1 KB Aufrufe: 26 -
 53 KB Aufrufe: 23
53 KB Aufrufe: 23 -
 57,5 KB Aufrufe: 24
57,5 KB Aufrufe: 24 -
 55,3 KB Aufrufe: 23
55,3 KB Aufrufe: 23 -
 86,2 KB Aufrufe: 26
86,2 KB Aufrufe: 26 -
 30,8 KB Aufrufe: 25
30,8 KB Aufrufe: 25
Zuletzt bearbeitet:







")

