Moin,
ich habe mir nen Quadrokopter mit ner FlyingF3 gebaut. Als Adapterplatine verwende ich die von dasdboot.
Fliegt schon mal und GPS habe ich auch zum Laufen bekommen. Nun wollte ich noch nen Baro anbauen. Habe nen MS5611 an den Anschluss für den BMP085 adaptiert.
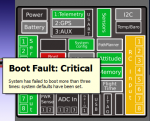
Habe in der System Config AltitudeHold aktiviert und auch mal mit GenericI2CSensor und I2CVMProgramSelect rumgespielt. Es wollte I2C aber einfach nicht aktivieren. In der Sensoranzeige bleibt das Feld immer grau. Es müsste doch aber wenigsten rot werden?
Hat hier vielleicht noch jemand nen Tip für mich wie man das hinbekommt?
Gruß
Robert
ich habe mir nen Quadrokopter mit ner FlyingF3 gebaut. Als Adapterplatine verwende ich die von dasdboot.
Fliegt schon mal und GPS habe ich auch zum Laufen bekommen. Nun wollte ich noch nen Baro anbauen. Habe nen MS5611 an den Anschluss für den BMP085 adaptiert.
Habe in der System Config AltitudeHold aktiviert und auch mal mit GenericI2CSensor und I2CVMProgramSelect rumgespielt. Es wollte I2C aber einfach nicht aktivieren. In der Sensoranzeige bleibt das Feld immer grau. Es müsste doch aber wenigsten rot werden?
Hat hier vielleicht noch jemand nen Tip für mich wie man das hinbekommt?
Gruß
Robert
 Hatte mal eins auf dem Auto, aber selbst da war es mir zu groß.
Hatte mal eins auf dem Auto, aber selbst da war es mir zu groß.