
Hallo zusammen,
ich habe gerade meinen zweiten Selbstbau flugfertig gemacht und habe - genau wie beim ersten Mal - wieder Probleme mit dem minimOSD: Es kommt beim Armen und beim Gasgeben immer wieder zu Aussetzern, bei denen das OSD für kurze Zeit verschwindet.
Bei meinem ersten Kopter (QR270) habe ich das erst in den Griff bekommen, als ich sowohl die Cam als auch das OSD über den linearen 5V Spannungswandler des TX versorgt habe. Diese Lösung gefällt mir aber nicht so, da das minimOSD angeblich 500mA zieht und das in Kombination mit der Kamera (50-70mA) vielleicht ein wenig viel für den Linearkonverter ist. Bisher ging es aber gut (keine Ausfälle).
Bei meinem neuen Selbstbau, wollte ich die Versorgung über den TX gern vermeiden. Zum Einsatz kommen ein PDB von Banggood mit 5V/12V Wandler und mit LC-Filter sowie ein TX795.
Ich habe den Aufbau mal skizziert:
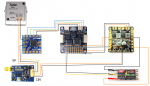
Was sagt ihr dazu? Hab ich etwas völlig falsch gemacht?
Mir ist klar, dass ein paar Groundloops im Aufbau sind, allerdings sind die jetzt auch nicht so ungewöhnlich:
- Das OSD hat eine Erdung über den UART und eine Erdung über den TX. Aber eine gemeinsame Erdung des OSD mit Cam und TX soll ja angeblich gegen mein Problem helfen.
- Der FC ist über die 5V Versorgung geerdet, über VBAT und zusätzlich über den ESC, da sowohl Signalkabel als auch Erdung des ESC angelötet sind
Leider habe ich darüber hinaus auch ESC-Noise im Bild: Sobald die Motoren laufen, sieht man horizontale Störungen im Bild, die jetzt aber auch keine Katastrophe sind. Trotzdem dachte ich, dass der LC-Filter das regeln würde.
Für ein wenig Feedback und Anregungen wäre ich dankbar.")
ich habe gerade meinen zweiten Selbstbau flugfertig gemacht und habe - genau wie beim ersten Mal - wieder Probleme mit dem minimOSD: Es kommt beim Armen und beim Gasgeben immer wieder zu Aussetzern, bei denen das OSD für kurze Zeit verschwindet.
Bei meinem ersten Kopter (QR270) habe ich das erst in den Griff bekommen, als ich sowohl die Cam als auch das OSD über den linearen 5V Spannungswandler des TX versorgt habe. Diese Lösung gefällt mir aber nicht so, da das minimOSD angeblich 500mA zieht und das in Kombination mit der Kamera (50-70mA) vielleicht ein wenig viel für den Linearkonverter ist. Bisher ging es aber gut (keine Ausfälle).
Bei meinem neuen Selbstbau, wollte ich die Versorgung über den TX gern vermeiden. Zum Einsatz kommen ein PDB von Banggood mit 5V/12V Wandler und mit LC-Filter sowie ein TX795.
Ich habe den Aufbau mal skizziert:
Was sagt ihr dazu? Hab ich etwas völlig falsch gemacht?
Mir ist klar, dass ein paar Groundloops im Aufbau sind, allerdings sind die jetzt auch nicht so ungewöhnlich:
- Das OSD hat eine Erdung über den UART und eine Erdung über den TX. Aber eine gemeinsame Erdung des OSD mit Cam und TX soll ja angeblich gegen mein Problem helfen.
- Der FC ist über die 5V Versorgung geerdet, über VBAT und zusätzlich über den ESC, da sowohl Signalkabel als auch Erdung des ESC angelötet sind
Leider habe ich darüber hinaus auch ESC-Noise im Bild: Sobald die Motoren laufen, sieht man horizontale Störungen im Bild, die jetzt aber auch keine Katastrophe sind. Trotzdem dachte ich, dass der LC-Filter das regeln würde.
Für ein wenig Feedback und Anregungen wäre ich dankbar.
Zuletzt bearbeitet:


