Das Hat mir keine Ruhe gelassen. Ich hatte hier noch eine Naze32 acro liegen der habe ich jetzt einen Baro und ein GPS mit Mag verpasst.
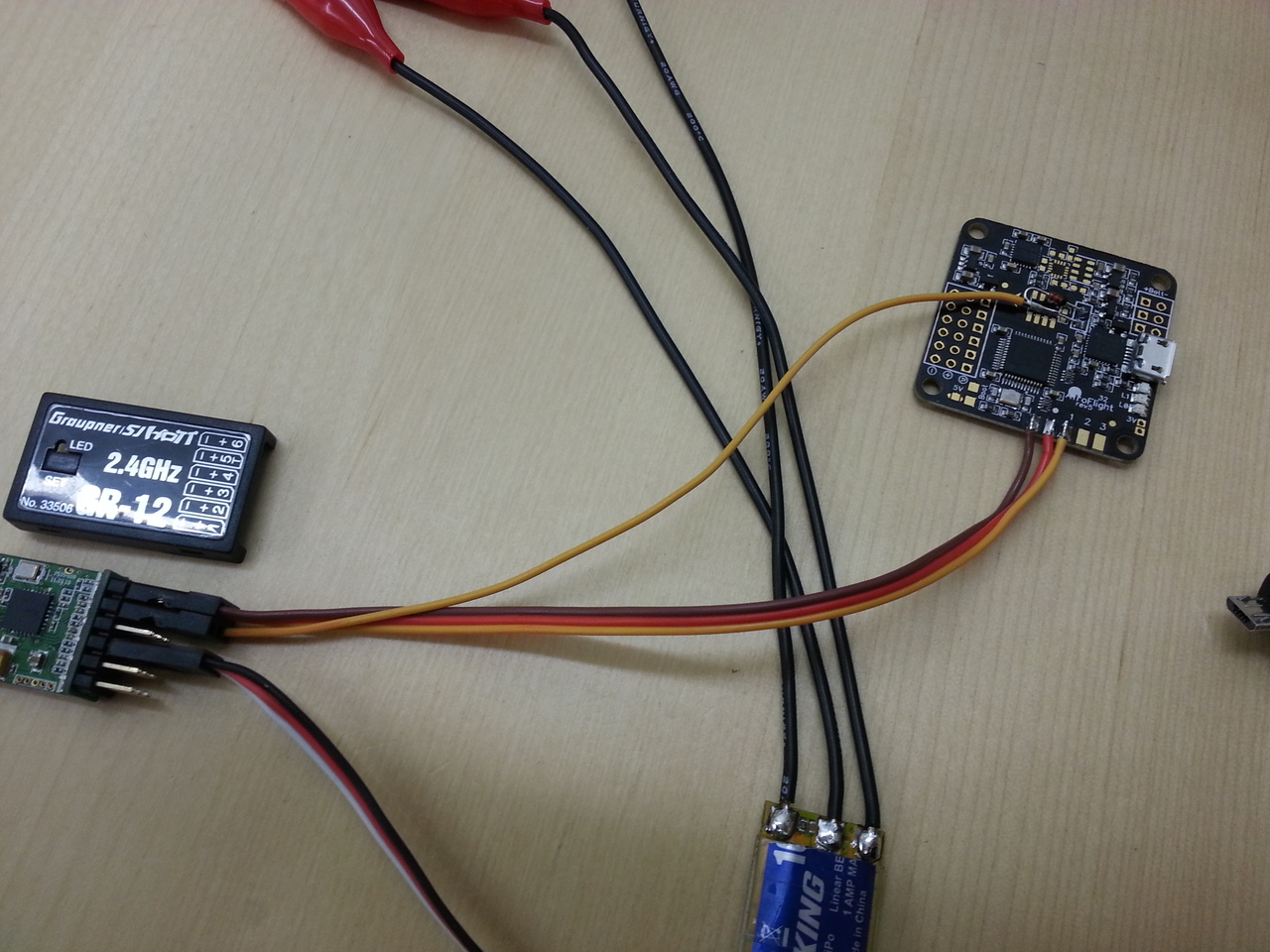
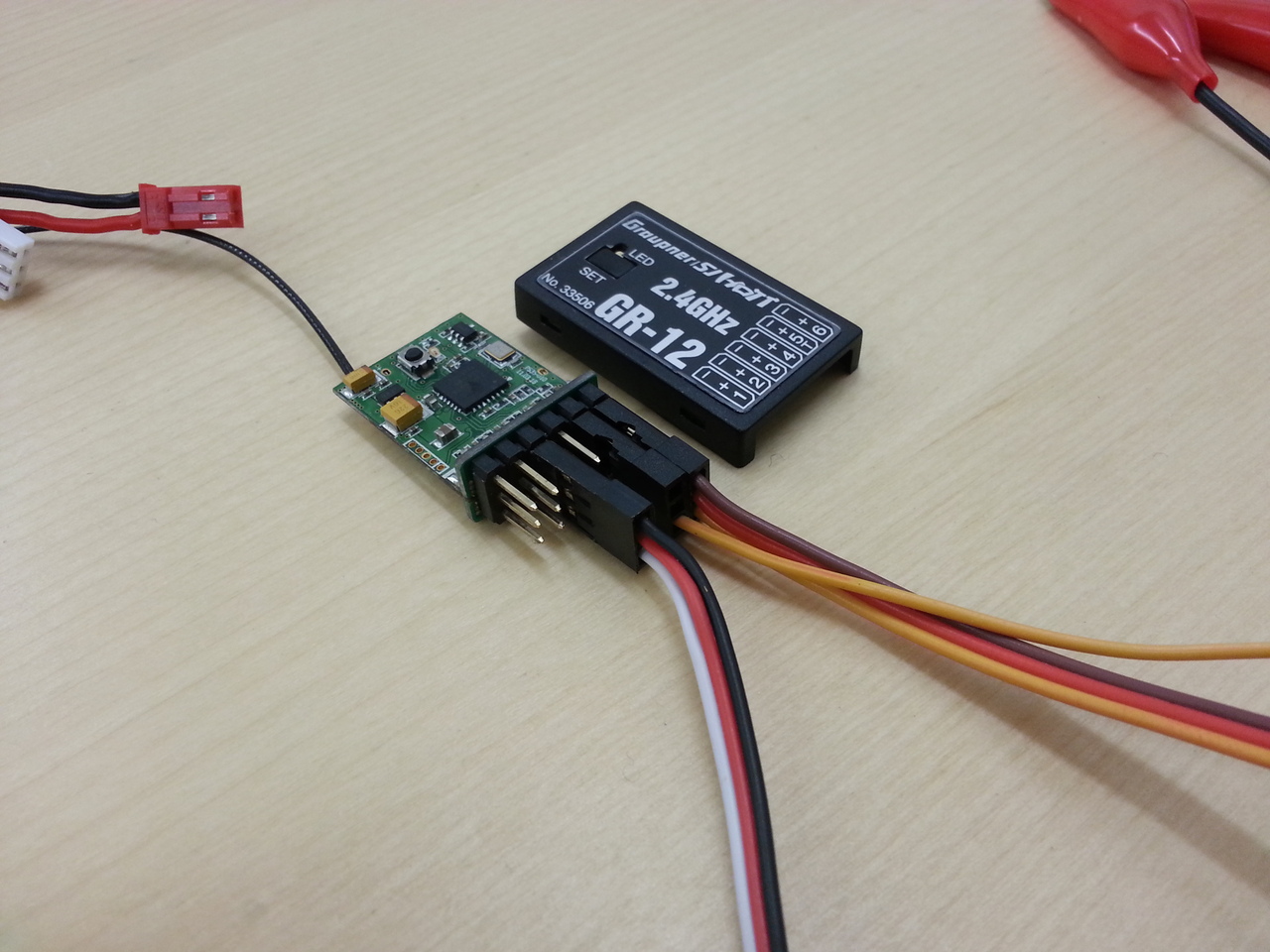
Empfänger Graupner GR 12
Im Telemetrie Menue nach rechts Blättern und einstellen CH OUT TYPE SUMO 08 - dann wird auf Pin6 des Empfängers eine Impulskette ausgegeben. Diese kommt an der NAZE an Anschluß 1
Im Empfänger (eine Seite nach links) 5CH FUNCTION : SENSOR einstellen. ( GR 16 hat ja sowiso einen telemetrieport)
Da bei mir auf 3 und 4 an der Naze das GPS steckt kommt der
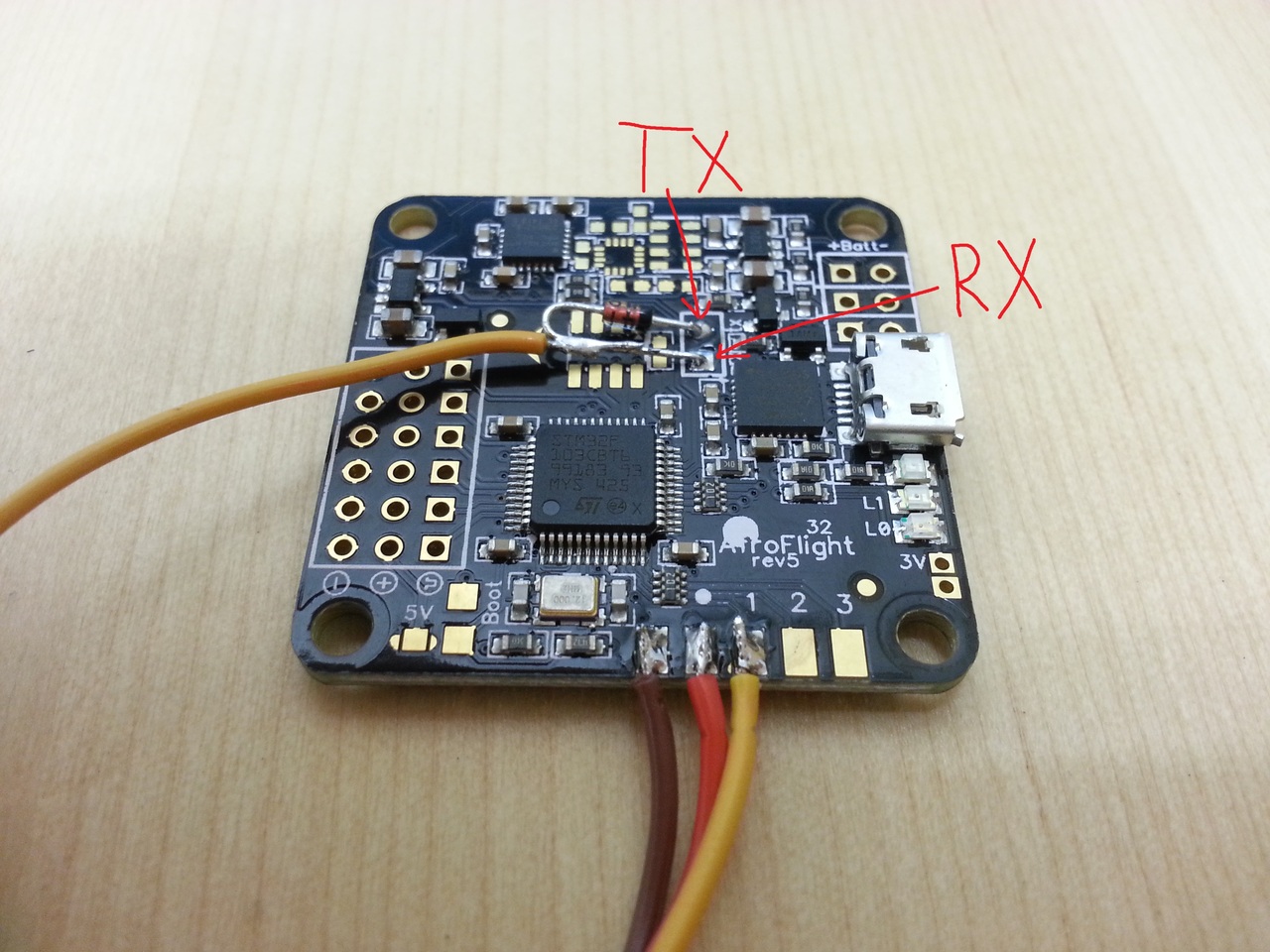
Telemetrieanschluß an 5 jetzt wird zwischen 5 und 6 eine Diode eingelötet.
Als Soft habe ich cleanfligt 2015 2 18 genommen.
Ein Problem hatte ich mit der Doku generell hier werden manche Einstellungen beschrieben die es nicht mehr gibt , die Doku ist meist zu alt. Manche Einstellungen kann man nicht mehr über die CLI machen , da sich die sich inzwischen über die Cleanflight gui einstellen lassen.
SAVE in der der CLI nicht vergessen.!
Cleanflight GUI
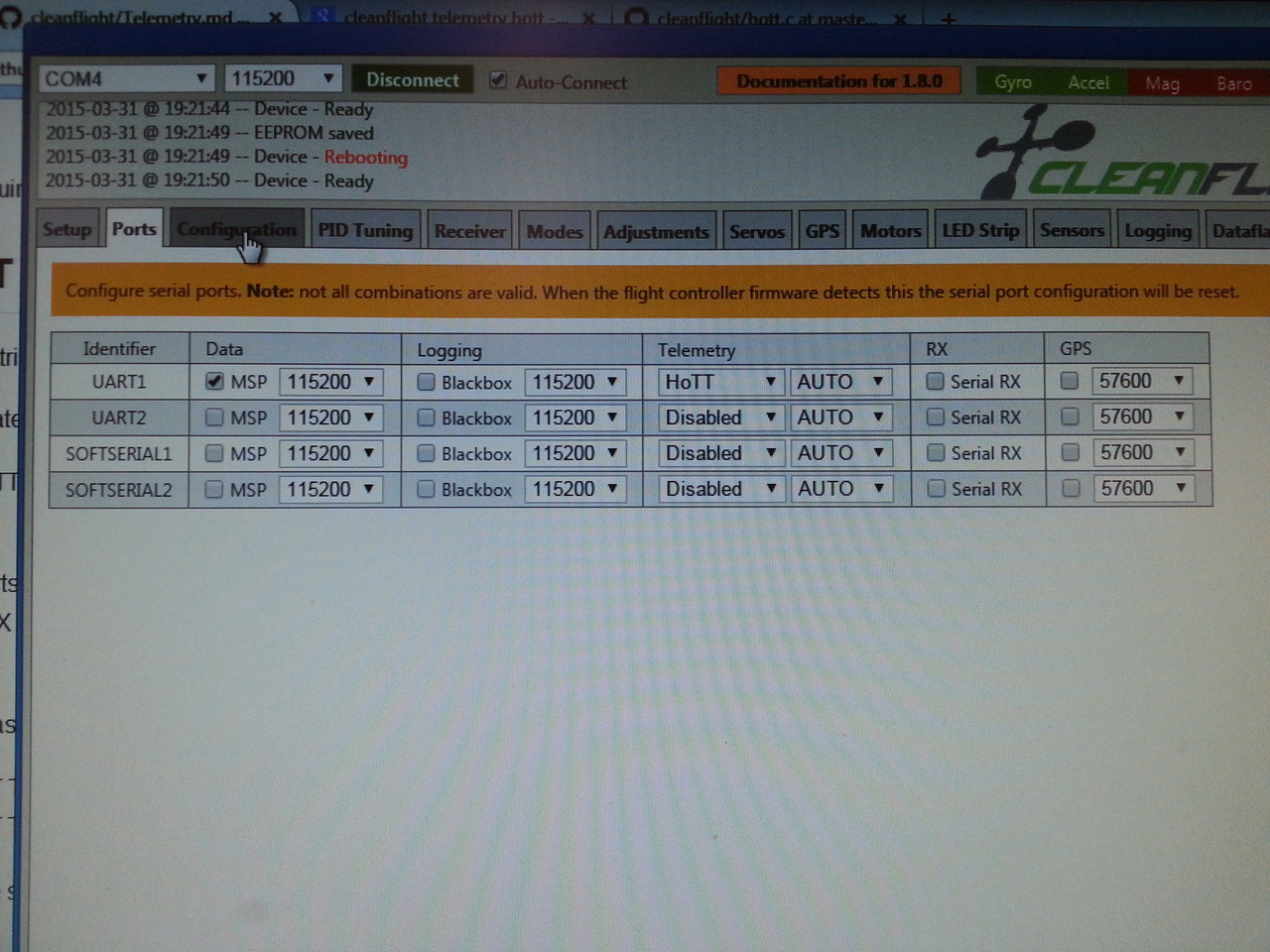
PORTs
UART1 - MSP,CLI,Telemetry wenn armed ,GPS passt.. habe ich noch nicht benutzt hier soll BT dran. sind die TX RX pins mitte Board
UART2 - GPS das ist pin 3 RX und 4TX (wenn es nicht geht rx und tx tauschen - müssen über kreuz angeschlossen werden)
Softserial1 Telemetry Pin 5RX und 6TX hier habe ich den Graupner telemetrieanschluß dran und eine Diode dazwischen
Softserial2 PIN 7 und PIN 8 wofür ???- eventuell osd ...
SAVE and Reboot
Configuration
* RX_ppm
* GPS Enable
GPS Protokoll und Baudrate je nachdem worauf euer GPS eingestellt ist.
*Vbat monitor
* Softserial
*Telemetry
SAVE and Reboot
CLI
set
telemetry_provider = 1 setzen dann sollte bei set (enter) das so aussehen :
Entering CLI Mode, type 'exit' to return, or 'help'
# set
Current settings:
looptime = 3500
emf_avoidance = 0
mid_rc = 1500
min_check = 1100
max_check = 1900
rssi_channel = 0
rssi_scale = 30
input_filtering_mode = 0
min_throttle = 1150
max_throttle = 1850
min_command = 1000
servo_center_pulse = 1500
3d_deadband_low = 1406
3d_deadband_high = 1514
3d_neutral = 1460
3d_deadband_throttle = 50
motor_pwm_rate = 400
servo_pwm_rate = 50
retarded_arm = 0
disarm_kill_switch = 1
auto_disarm_delay = 5
small_angle = 25
flaps_speed = 0
fixedwing_althold_dir = 1
serial_port_1_scenario = 1
serial_port_2_scenario = 2
serial_port_3_scenario = 4
serial_port_4_scenario = 4
reboot_character = 82
msp_baudrate = 115200
cli_baudrate = 115200
gps_baudrate = 115200
gps_passthrough_baudrate = 115200
gps_provider = 0
gps_sbas_mode = 0
gps_auto_config = 1
gps_auto_baud = 0
gps_pos_p = 15
gps_pos_i = 0
gps_pos_d = 0
gps_posr_p = 34
gps_posr_i = 14
gps_posr_d = 53
gps_nav_p = 25
gps_nav_i = 33
gps_nav_d = 83
gps_wp_radius = 200
nav_controls_heading = 1
nav_speed_min = 100
nav_speed_max = 300
nav_slew_rate = 30
serialrx_provider = 0
spektrum_sat_bind = 0
telemetry_provider = 1
telemetry_switch = 0
telemetry_inversion = 0
frsky_default_lattitude = 0.000
frsky_default_longitude = 0.000
frsky_coordinates_format = 0
frsky_unit = 0
battery_capacity = 0
vbat_scale = 110
vbat_max_cell_voltage = 43
vbat_min_cell_voltage = 33
vbat_warning_cell_voltage = 35
current_meter_scale = 400
current_meter_offset = 0
multiwii_current_meter_output = 0
current_meter_type = 1
align_gyro = 0
align_acc = 0
align_mag = 0
align_board_roll = 0
align_board_pitch = 0
align_board_yaw = 0
max_angle_inclination = 500
gyro_lpf = 42
moron_threshold = 32
gyro_cmpf_factor = 600
gyro_cmpfm_factor = 250
alt_hold_deadband = 40
alt_hold_fast_change = 1
deadband = 0
yaw_deadband = 0
throttle_correction_value = 0
throttle_correction_angle = 800
yaw_control_direction = 1
yaw_direction = 1
tri_unarmed_servo = 1
default_rate_profile = 0
rc_rate = 90
rc_expo = 65
thr_mid = 50
thr_expo = 0
roll_pitch_rate = 0
yaw_rate = 0
tpa_rate = 0
tpa_breakpoint = 1500
failsafe_delay = 10
failsafe_off_delay = 200
failsafe_throttle = 1200
failsafe_min_usec = 985
failsafe_max_usec = 2115
gimbal_flags = 1
acc_hardware = 0
acc_lpf_factor = 4
accxy_deadband = 40
accz_deadband = 40
accz_lpf_cutoff = 5.000
acc_unarmedcal = 1
acc_trim_pitch = 0
acc_trim_roll = 0
baro_tab_size = 21
baro_noise_lpf = 0.600
baro_cf_vel = 0.985
baro_cf_alt = 0.965
mag_hardware = 0
mag_declination = 0
pid_controller = 0
p_pitch = 40
i_pitch = 30
d_pitch = 23
p_roll = 40
i_roll = 30
d_roll = 23
p_yaw = 85
i_yaw = 45
d_yaw = 0
p_pitchf = 2.500
i_pitchf = 0.600
d_pitchf = 0.060
p_rollf = 2.500
i_rollf = 0.600
d_rollf = 0.060
p_yawf = 8.000
i_yawf = 0.500
d_yawf = 0.050
level_horizon = 3.000
level_angle = 5.000
sensitivity_horizon = 75
p_alt = 50
i_alt = 0
d_alt = 0
p_level = 90
i_level = 10
d_level = 100
p_vel = 120
i_vel = 45
d_vel = 1
blackbox_rate_num = 1
blackbox_rate_denom = 1
#
SAVE and Reboot
Sender aus Empfänger aus und wieder alles neu einschalten!
Ich hab das jetzt nur im Hobbykeller getestet noch kein Batt anschluß dran.. nicht im flug getestet ! Zumindest erscheinen so im Sender die Sensoren.


")

