
Rosewhite Dragon Problem mit Phobotic CP
Hallo Leute!
Bin mit dem Phobotic CP (nicht HV) schon ziemlich am Verzweifeln Die letzten zwei Wochen waren ein Horror...
Die letzten zwei Wochen waren ein Horror...
Setup:
- RW Dragon Gimbal
- GH4 mit Olymp. M.Zuiko 12mm
- Gimbal ist starr mit Kopter verbunden (6 Abstandsbolzen - die ich auch schon um die Hälfte gekürzt habe, um eine Fehlerquelle auszuschließen)
- Mittlerweile 8 Dragon Dämpfer (mit 4 wars auch nicht besser, eher schlechter)
- Cam auf allen Achsen gut ausbalanciert (beibt in jeder Position stehen, yaw rührt sich nicht, wenn ich den Kopter hin u her neige)
- je 2 Arme v. Kopter bei autotunings auf insges. 3 Sessel gelegt und fixiert
Will jetzt gar nicht mehr so genau darauf eingehen, jedenfalls hab ich rund 20 autotunings gemacht (inkl. händischer Nachbearbeitung) - oft fing der Dragon wild zu zappeln an beim oder nach dem autotuning oder bei pitch down - zerstörte mir sogar die IMU, da sie unter der Cam hing und hinten gegen den Dragon aufschlug, neue bestellt usw usw
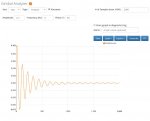
Mit neuer IMU und rund 10 autotunings funktionierte es dann plötzlich durch Zufall, händisch nur ganz wenig nachgebessert, gimbal analyser Graphen sahen ganz gut aus, keine Vibrationen im Flug.
So, da man die GH4 fürs Speicherkarte und Akku entfernen runtermontieren muß, ist irgendetwas an der Balancierung (roll) passiert, neue Balancierung, neues autotune. Tja und leider bekomme ich es nicht mehr hin, habe die Vibrationen bei pitch down durch Parameter verändern wegbekommen, Trockentest sah gut aus, nur im Flug hab ich starke Vibrationen (nicht nur bei pitch down)
Kenn sich evtl. jemand mit dem phobotic tuning gut aus, ich bekomme es einfach nicht hin, sch*. Phobotic Support antwortet nicht, schon 2 Anfragen hingeschickt.
Bitte um Hilfe ;-}
danke, lg
Tom
Hallo Leute!
Bin mit dem Phobotic CP (nicht HV) schon ziemlich am Verzweifeln
Die letzten zwei Wochen waren ein Horror...Setup:
- RW Dragon Gimbal
- GH4 mit Olymp. M.Zuiko 12mm
- Gimbal ist starr mit Kopter verbunden (6 Abstandsbolzen - die ich auch schon um die Hälfte gekürzt habe, um eine Fehlerquelle auszuschließen)
- Mittlerweile 8 Dragon Dämpfer (mit 4 wars auch nicht besser, eher schlechter)
- Cam auf allen Achsen gut ausbalanciert (beibt in jeder Position stehen, yaw rührt sich nicht, wenn ich den Kopter hin u her neige)
- je 2 Arme v. Kopter bei autotunings auf insges. 3 Sessel gelegt und fixiert
Will jetzt gar nicht mehr so genau darauf eingehen, jedenfalls hab ich rund 20 autotunings gemacht (inkl. händischer Nachbearbeitung) - oft fing der Dragon wild zu zappeln an beim oder nach dem autotuning oder bei pitch down - zerstörte mir sogar die IMU, da sie unter der Cam hing und hinten gegen den Dragon aufschlug, neue bestellt usw usw
Mit neuer IMU und rund 10 autotunings funktionierte es dann plötzlich durch Zufall, händisch nur ganz wenig nachgebessert, gimbal analyser Graphen sahen ganz gut aus, keine Vibrationen im Flug.
So, da man die GH4 fürs Speicherkarte und Akku entfernen runtermontieren muß, ist irgendetwas an der Balancierung (roll) passiert, neue Balancierung, neues autotune. Tja und leider bekomme ich es nicht mehr hin, habe die Vibrationen bei pitch down durch Parameter verändern wegbekommen, Trockentest sah gut aus, nur im Flug hab ich starke Vibrationen (nicht nur bei pitch down)
Kenn sich evtl. jemand mit dem phobotic tuning gut aus, ich bekomme es einfach nicht hin, sch*. Phobotic Support antwortet nicht, schon 2 Anfragen hingeschickt.
Bitte um Hilfe ;-}
danke, lg
Tom
Anhänge
-
 89,8 KB Aufrufe: 6
89,8 KB Aufrufe: 6 -
 60,6 KB Aufrufe: 7
60,6 KB Aufrufe: 7 -
 99,1 KB Aufrufe: 6
99,1 KB Aufrufe: 6 -
 64,5 KB Aufrufe: 7
64,5 KB Aufrufe: 7 -
 99,7 KB Aufrufe: 6
99,7 KB Aufrufe: 6 -
 60,4 KB Aufrufe: 8
60,4 KB Aufrufe: 8 -
 1,6 MB Aufrufe: 20
1,6 MB Aufrufe: 20
Zuletzt bearbeitet:

