
Leider ist z.b. IMU Logging (Vibrationen) aus. Einen Fehler hat das Board jedenfalls nicht gesehen.
Aber: Unmittelbar bevor der Anstieg losging, wurde auf Stabilize geschaltet. D.h. der schoss nicht im Althold hoch.
Im Stabilize lag dein Schwebewert wohl um die 300-400, als im Althold bei 50% Stickstellung auf Stabilize geschaltet wurde, hat der also tüchtig Gas nach oben gegeben.
Entweder ist auf deiner Funke der Schaltwert zwischen einer Stabilize und Althold Einstellung sehr nah an der Grenze, oder du bist versehentlich an den Schalter gekommen.
Check auch noch mal ganz genau, ob der Copter (ohne Propeller!) in RTL schaltet, wenn du den Schalter umlegst (Mission Planner zeigt das an). Evtl. schaltet der aus irgendeinem Grund auf Stabilize statt RTL.
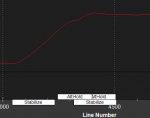
Da sieht man schön, wie Stabilize aktiv wird direkt vorm hochfliegen.
Aber: Unmittelbar bevor der Anstieg losging, wurde auf Stabilize geschaltet. D.h. der schoss nicht im Althold hoch.
Im Stabilize lag dein Schwebewert wohl um die 300-400, als im Althold bei 50% Stickstellung auf Stabilize geschaltet wurde, hat der also tüchtig Gas nach oben gegeben.
Entweder ist auf deiner Funke der Schaltwert zwischen einer Stabilize und Althold Einstellung sehr nah an der Grenze, oder du bist versehentlich an den Schalter gekommen.
Check auch noch mal ganz genau, ob der Copter (ohne Propeller!) in RTL schaltet, wenn du den Schalter umlegst (Mission Planner zeigt das an). Evtl. schaltet der aus irgendeinem Grund auf Stabilize statt RTL.
Da sieht man schön, wie Stabilize aktiv wird direkt vorm hochfliegen.
Zuletzt bearbeitet:


