wenn ich den Wert des RSSI im Log der Taranis mit dem Wert vergleiche, den mir der Matek405Wing im OSD anzeigt, so stelle ich fest, das diese Werte doch erheblich voneinander abweichen.
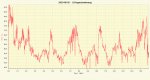
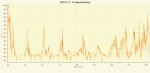
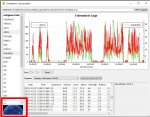
In der Brille habe ich meist einen relativ konstanten Wert, der mit Zunahme der Entfernung zwar kleiner wird, aber nur geringfügig schwankt, wenn ich dazu aber mal den RSSI Wert im Log grafisch darstelle, so ist das doch ein recht stark schwankender Wert. Der RSSI Wert vom Receiver müsste doch immer an beiden gleich sein ( also an den Matek und an die X9D+ über Telemetrie gesendet ), Glättet der Matek diesen Wert über eine Mittelwert Bildung oder wie ist das zu erklären ??
Andererseits zeigt mir der Matek in der Summery nach DISARM den Min RSSI teilweise mit 10 oder weniger % an, während im Log der Wert nie unter ca. 45% war, auch komisch
In der Brille habe ich meist einen relativ konstanten Wert, der mit Zunahme der Entfernung zwar kleiner wird, aber nur geringfügig schwankt, wenn ich dazu aber mal den RSSI Wert im Log grafisch darstelle, so ist das doch ein recht stark schwankender Wert. Der RSSI Wert vom Receiver müsste doch immer an beiden gleich sein ( also an den Matek und an die X9D+ über Telemetrie gesendet ), Glättet der Matek diesen Wert über eine Mittelwert Bildung oder wie ist das zu erklären ??
Andererseits zeigt mir der Matek in der Summery nach DISARM den Min RSSI teilweise mit 10 oder weniger % an, während im Log der Wert nie unter ca. 45% war, auch komisch
") niemand RSSI überhaupt versteht.
niemand RSSI überhaupt versteht.