Mein System:
Sender: Taranis X9D + mit OpenTx 2.2.3
Empfänger: RX8R
Sensor: Smart Port Drehzahlsensor + 2 Temperatursensoren v. Engel
Companion 2.2.3
Helle‘s Skript V220 3004_417 S.284 ff
Flugmodell: Spitfire 1,6 m von Freewing (aus Schaum)
Hallo Gemeinde,
ich habe mir diesen Smart Port Drehzahlsensor gekauft:
Smart Port RPM Sensor mit 2 Temperatur Sensoren - Engel Modellbau + Technik
Der enthält auch 2 Temperatursensoren. Und darauf kommt es mir an.
Mein Ziel ist eine Temperaturabhängige Höhenruderdrift an meiner Spit auszugleichen. Ich will jetzt keine weiteren Vorträge halten und gleich zur Sache kommen.
FRAGE: Wie kann ich einen Temperatursensor in eine Kurve einbinden?
Geht das, wenn ja wie?
Geht das nicht, wenn nein warum nicht?
Woran ich bis jetzt scheitere ist die Umsetzung der Temperaturwerte in eine Kurvenskala.
Der Sensor gibt Celsius-Grad-Werte von -20 bis +250 Grad raus. Per Telemetrie wird mir das am Sender einwandfrei angezeigt. Der Sensor arbeitet also!
Die Kurvencharakteristik geht auf der x-Achse von Werten -100 bis +100 aus. S. Bild Kurven-jpeg.

Auf der y-Achse will ich das Höhenruder ansteuern.
Kann ich die Grad-Werte direkt in die Kurve einlesen? Also -20 bis +100? Oder muß ich da noch was umrechnen? Interessant für mich wäre ein Bereich von -10°C bis +40°C den ich verarbeiten will.
Im Bild Telemetrie.jpeg seht Ihr die Einbindung des Sensors in die Telemetrie. Es sind die Tmp1, Tmp2 und RPM Sensoren.

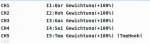
Ich habe den Tmp1 auch schon versuchsweise als Input eingegeben s. I5:Tmp1 . Er taucht im entsprechenden Dropdown-Menü als Tele3 auf. S. Bild Inputs.jpeg.

Ich habe auch schon eine Mischerzeile erstellt. Aber bis jetzt tut sich am Höhenruder noch nichts.

Ich gehe jetzt mal davon aus, daß ich im Sender alles richtig konfiguriert habe. Ich bin da nach Helle‘s Skript vorgegangen, s.S.284ff.
Ich hoffe mich einigermaßen verständlich ausgedrückt zu haben und bin für jeden Hinweis dankbar.
Piperman
Sender: Taranis X9D + mit OpenTx 2.2.3
Empfänger: RX8R
Sensor: Smart Port Drehzahlsensor + 2 Temperatursensoren v. Engel
Companion 2.2.3
Helle‘s Skript V220 3004_417 S.284 ff
Flugmodell: Spitfire 1,6 m von Freewing (aus Schaum)
Hallo Gemeinde,
ich habe mir diesen Smart Port Drehzahlsensor gekauft:
Smart Port RPM Sensor mit 2 Temperatur Sensoren - Engel Modellbau + Technik
Der enthält auch 2 Temperatursensoren. Und darauf kommt es mir an.
Mein Ziel ist eine Temperaturabhängige Höhenruderdrift an meiner Spit auszugleichen. Ich will jetzt keine weiteren Vorträge halten und gleich zur Sache kommen.
FRAGE: Wie kann ich einen Temperatursensor in eine Kurve einbinden?
Geht das, wenn ja wie?
Geht das nicht, wenn nein warum nicht?
Woran ich bis jetzt scheitere ist die Umsetzung der Temperaturwerte in eine Kurvenskala.
Der Sensor gibt Celsius-Grad-Werte von -20 bis +250 Grad raus. Per Telemetrie wird mir das am Sender einwandfrei angezeigt. Der Sensor arbeitet also!
Die Kurvencharakteristik geht auf der x-Achse von Werten -100 bis +100 aus. S. Bild Kurven-jpeg.
Auf der y-Achse will ich das Höhenruder ansteuern.
Kann ich die Grad-Werte direkt in die Kurve einlesen? Also -20 bis +100? Oder muß ich da noch was umrechnen? Interessant für mich wäre ein Bereich von -10°C bis +40°C den ich verarbeiten will.
Im Bild Telemetrie.jpeg seht Ihr die Einbindung des Sensors in die Telemetrie. Es sind die Tmp1, Tmp2 und RPM Sensoren.
Ich habe den Tmp1 auch schon versuchsweise als Input eingegeben s. I5:Tmp1 . Er taucht im entsprechenden Dropdown-Menü als Tele3 auf. S. Bild Inputs.jpeg.
Ich habe auch schon eine Mischerzeile erstellt. Aber bis jetzt tut sich am Höhenruder noch nichts.
Ich gehe jetzt mal davon aus, daß ich im Sender alles richtig konfiguriert habe. Ich bin da nach Helle‘s Skript vorgegangen, s.S.284ff.
Ich hoffe mich einigermaßen verständlich ausgedrückt zu haben und bin für jeden Hinweis dankbar.
Piperman
Anhänge
-
 110,7 KB Aufrufe: 4
110,7 KB Aufrufe: 4
")