
Zu starke Vibrationen?
- Themenstarter Bastian
- Beginndatum

Welche Muttern würde man hier nehmen? Standardmuttern in Verbindung mit Sicherungslack oder selbstsichernde Muttern?
Idealerweise würde ich natürlich gern die selbstsichernden Muttern nehmen, bin jedoch nicht sicher ob die ausreichend fest anzuziehen sind. Auf Fotos von diversen Coptern konnte ich bis jetzt nur die Standardmuttern erkennen.
Idealerweise würde ich natürlich gern die selbstsichernden Muttern nehmen, bin jedoch nicht sicher ob die ausreichend fest anzuziehen sind. Auf Fotos von diversen Coptern konnte ich bis jetzt nur die Standardmuttern erkennen.
Man kann unter den Propeller eine Zahnscheibe oder einen Schnurring (U-Scheibe mit ganz feinen querverlaufenden Rillen) legen und oben auf den Prop eine möglichst spielfrei U-Scheibe plus Mutter oder noch besser eine Flanschmutter (sieht aus wie eine mit einer dicken U-Scheibe zusammengeschweißte Mutter) verwenden.
evtl.etwas off Topic!?!?....
(Wir könnten bei Bedarf auch gerne ein neues Thema eröffnen?....)
Ich habe mir überlegt, anhand der LOG-Files könnte man doch Wunderbar den Stromverbrauch und somit auch den Wirkungsgrad ableiten, natürlich nur das Ergebnis aller Faktoren, sprich Gewicht, Motoren/Propeller-Kombi und Anzahl der Motoren.
Jedoch könnte so jeder für sich eine kleine Analyse der Propeller starten und den Stromverbrauch zb. beim einfachen 30Sek. Schwebeflug vergleichen, so lässt sich zumindest sehen mit wie viel Leistung/Strom der Copter an welchem Propeller gehalten wird und mit wieviel THR_OUT das Ding schwebt.
Ich habe mal eine ersten Test-Vergleich zwischen meinen billigen SF Probs 10x4,7 zu meine guten 9x4,7 gemacht (ich warte noch auf meine Bestellung, dann kann ich auch die 9er und 10er Probs mit einander vergleichen.... was sicher Sinnvoller ist.)
Das Ergebnis war dennoch schockierend für mich, die billigen 10x4,7 benötigen nur ca. 10,5A Summenstrom um meinen brummer 1030g Tricopter (hat über Weihnachten wieder etwas zugenommen") ) in der Luft zu halten, das THR_OUT lag bei 450.
) in der Luft zu halten, das THR_OUT lag bei 450.
Die guten 9x4,7 ziehen meinem Akku unter gleichen Bedingungen schon 12-13A Strom beim schweben. Das THR_OUT liegt bei 650.
Mein FAZIT: 10er machen bei mir vermutlich mehr Sinn!?
Die 10x 4,7 SF Probs mit den guten SUPPO 2212-13 am 1030g Tricopter in einem längeren Testflug in unterschiedlichen Modi

Die 9x4,7 Carbon verstärkte von Flyduino alles gleich jedoch nur eine Min Schweben in der Tiefgarage (schlechtes Wetter)

(Wir könnten bei Bedarf auch gerne ein neues Thema eröffnen?....)
Ich habe mir überlegt, anhand der LOG-Files könnte man doch Wunderbar den Stromverbrauch und somit auch den Wirkungsgrad ableiten, natürlich nur das Ergebnis aller Faktoren, sprich Gewicht, Motoren/Propeller-Kombi und Anzahl der Motoren.
Jedoch könnte so jeder für sich eine kleine Analyse der Propeller starten und den Stromverbrauch zb. beim einfachen 30Sek. Schwebeflug vergleichen, so lässt sich zumindest sehen mit wie viel Leistung/Strom der Copter an welchem Propeller gehalten wird und mit wieviel THR_OUT das Ding schwebt.
Ich habe mal eine ersten Test-Vergleich zwischen meinen billigen SF Probs 10x4,7 zu meine guten 9x4,7 gemacht (ich warte noch auf meine Bestellung, dann kann ich auch die 9er und 10er Probs mit einander vergleichen.... was sicher Sinnvoller ist.)
Das Ergebnis war dennoch schockierend für mich, die billigen 10x4,7 benötigen nur ca. 10,5A Summenstrom um meinen brummer 1030g Tricopter (hat über Weihnachten wieder etwas zugenommen
) in der Luft zu halten, das THR_OUT lag bei 450. Die guten 9x4,7 ziehen meinem Akku unter gleichen Bedingungen schon 12-13A Strom beim schweben. Das THR_OUT liegt bei 650.
Mein FAZIT: 10er machen bei mir vermutlich mehr Sinn!?
Die 10x 4,7 SF Probs mit den guten SUPPO 2212-13 am 1030g Tricopter in einem längeren Testflug in unterschiedlichen Modi
Die 9x4,7 Carbon verstärkte von Flyduino alles gleich jedoch nur eine Min Schweben in der Tiefgarage (schlechtes Wetter)
Zuletzt bearbeitet:
Nach euren Tipps rüste ich aktuell alle Anschlüsse (Stromsensor, Gimbal, Empfänger, ...) mit Ausnahme der ESC-Leitungen auf dünne 0,13mm² Querschnitte um und werde kein Wickelband mehr verwenden. Gefällt mir zwar optisch nicht so gut, aber die Funktion ist hier wichtiger als die Optik.
Zunächst werde ich die Motoren einzeln und anschließend mit Propellern über die LASER-Methode wuchten. Die Propeller werde ich mit Muttern befestigen, ich vermute eine Unwucht bei meinen vorher eingesetzen Spinnern.
Bei der APM-Befestigung werde ich zunächst meine aktuelle 3-lagige Spiegeltape-Variante beibehalten. Die Meinungen hierzu waren im Thread ja nicht eindeutig. Mal hoffen, dass die obenstehenden Maßnahmen zielführend sind und das Spiegeltape dann ausreichend ist.
Ich werde euch berichten, sobald ich eine neue Vibrationsmessung durchführen konnte.
Zunächst werde ich die Motoren einzeln und anschließend mit Propellern über die LASER-Methode wuchten. Die Propeller werde ich mit Muttern befestigen, ich vermute eine Unwucht bei meinen vorher eingesetzen Spinnern.
Bei der APM-Befestigung werde ich zunächst meine aktuelle 3-lagige Spiegeltape-Variante beibehalten. Die Meinungen hierzu waren im Thread ja nicht eindeutig. Mal hoffen, dass die obenstehenden Maßnahmen zielführend sind und das Spiegeltape dann ausreichend ist.
Ich werde euch berichten, sobald ich eine neue Vibrationsmessung durchführen konnte.
Ich glaube eher, dass das Problem ganz woanders liegt...nämlich bei den verwendeten Motoren!
Meine APM ist mit Klettband auf einer GFK-Platte befestigt, die über M3x15 Schwingungsdämpfer von Mikrokopter.de (50 Shore Härte) mit der Centerplate verbunden ist. Motoren sind bei mit T-Motor MT2216-12 (800 kv) und die haben sehr gut gewuchtete Glocken und laufen absolut rund ohne montierten Propeller. Der Kopter ist ein Hexa mit 800mm Durchmesser und einem faltbaren Carbon-Gestell, ähnlich den Tarot.
Die Propeller sind einfache 11x4.5 EPP mit Nylon und Glasfaser verstärkt, ebenfalls von Mikrokopter.de und die habe ich nur statisch mit einem magnetischen Prop-Balancer und Schleifpapier gewuchtet.
Die Vibrationen im Schwebeflug liegen bei mir auf allen Achsen unter 0,1 und das ohne weitere Modifikationen.
Was die Kabel angeht, so würde ich vom Bündeln der Kabel absehen, denn ein Bündel wird starr und überträgt gut Vibrationen, gerade wenn man es noch an der Centerplate mit Kabelbindern befestigt.
Ich poste bei Gelegenheit noch Bilder wie ich das gelöst habe...
Viele Grüße!
Sven
Edit: So, das Bild hängt an. Dort siehst Du ganz genau, dass meine Kabel alle lose von der APM weggehen und jedes für sich Spiel hat. Auch erkennt man die Gummi-Abstandshalter, die das ganze Türmchen von der Centerplate entkoppeln.
Meine APM ist mit Klettband auf einer GFK-Platte befestigt, die über M3x15 Schwingungsdämpfer von Mikrokopter.de (50 Shore Härte) mit der Centerplate verbunden ist. Motoren sind bei mit T-Motor MT2216-12 (800 kv) und die haben sehr gut gewuchtete Glocken und laufen absolut rund ohne montierten Propeller. Der Kopter ist ein Hexa mit 800mm Durchmesser und einem faltbaren Carbon-Gestell, ähnlich den Tarot.
Die Propeller sind einfache 11x4.5 EPP mit Nylon und Glasfaser verstärkt, ebenfalls von Mikrokopter.de und die habe ich nur statisch mit einem magnetischen Prop-Balancer und Schleifpapier gewuchtet.
Die Vibrationen im Schwebeflug liegen bei mir auf allen Achsen unter 0,1 und das ohne weitere Modifikationen.
Was die Kabel angeht, so würde ich vom Bündeln der Kabel absehen, denn ein Bündel wird starr und überträgt gut Vibrationen, gerade wenn man es noch an der Centerplate mit Kabelbindern befestigt.
Ich poste bei Gelegenheit noch Bilder wie ich das gelöst habe...
Viele Grüße!
Sven
Edit: So, das Bild hängt an. Dort siehst Du ganz genau, dass meine Kabel alle lose von der APM weggehen und jedes für sich Spiel hat. Auch erkennt man die Gummi-Abstandshalter, die das ganze Türmchen von der Centerplate entkoppeln.
Anhänge
-
 214,8 KB Aufrufe: 35
214,8 KB Aufrufe: 35
Zuletzt bearbeitet:
Du hast deutlich mehr Platz auf dem großen Copter. Bei mir ist vergleichsweise wenig Platz und die Leitungen hatten teilweise scharfkantige Teile berührt. Daher die Umwicklung mit dem Tape. Das Tape kommt ja aktuell alles runter, ggf. verwende ich den von Mosquito empfohlenen Geflechtschlauch. Muss ich mal ausprobieren, ob der flexibel genug ist.
Allerdings kannst du Recht haben, dass die Motoren das Problem sein könnten. Soweit ich das einschätzen kann laufen die teilweise auch ohne Propeller nicht wirklich ruhig. Muss ich mal sehen, wie ich die vernünftig gewuchtet bekomme. Bis jetzt hatte ich noch keinen Erfolg damit.
Allerdings kannst du Recht haben, dass die Motoren das Problem sein könnten. Soweit ich das einschätzen kann laufen die teilweise auch ohne Propeller nicht wirklich ruhig. Muss ich mal sehen, wie ich die vernünftig gewuchtet bekomme. Bis jetzt hatte ich noch keinen Erfolg damit.
Ich tippe eher auf ein Problem durch deine große Sandwichbauweise, Stichwort Hebelwirkung.
Das Gewicht jeder deiner Etagen und der große Hebelwinkel versetzen mit Sicherheit dein Board in Vibrationen.
Versuch mal dein APM direkt mit Spiegelklebeband oder wie ich es gemacht habe mit Polyamid 8mm Abstandsbolzen direkt zu verschrauben und das Huckepackgewicht von deinem APM entkoppelt separat.
Viel Erfolg
Das Gewicht jeder deiner Etagen und der große Hebelwinkel versetzen mit Sicherheit dein Board in Vibrationen.
Versuch mal dein APM direkt mit Spiegelklebeband oder wie ich es gemacht habe mit Polyamid 8mm Abstandsbolzen direkt zu verschrauben und das Huckepackgewicht von deinem APM entkoppelt separat.
Viel Erfolg
Man sieht es auf den Bildern schlecht...aber was ist denn an den Rundrohren noch so alles dran? Auf dem Bild erkennt man ja nur den Empfänger und die GPS-Antenne mit Shield. Warum muss das eigentlich gedämpft zur Centerplate aufgebaut sein?
Ich stimme Bastian erst einmal nicht zu, denn GPS und RX sind viel zu leicht, als dass es Probleme machen könnte. Hängt da aber noch eine Kamera und ein Gimbal oder Akkus mit dran, dann ist der Aufbau gegenüber der Centerplate zu flexibel und die Regelung wird sich immer aufschwingen.
Viele Grüße!
Sven
Ich stimme Bastian erst einmal nicht zu, denn GPS und RX sind viel zu leicht, als dass es Probleme machen könnte. Hängt da aber noch eine Kamera und ein Gimbal oder Akkus mit dran, dann ist der Aufbau gegenüber der Centerplate zu flexibel und die Regelung wird sich immer aufschwingen.
Viele Grüße!
Sven
Hallo Leute,
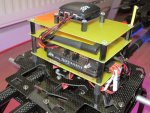
ich wollte kurz den aktuellen Stand des Umbaus der Elektronik nach euren Tipps (im Vergleich zu meinem Post #1) zeigen. Von den ESCs sind jetzt nur noch die Signalleitungen und ohne Wickelband angeschlossen. Auch das BEC (ganz oben) hat ausreichende Länge um keine Vibrationen zu übertragen. Der Pieper kommt direkt auf das Gehäuse um gar keine Verbindug zum Frame zu haben.
Lediglich die Leitungen zum Stromsensor gefallen mir noch nicht. Hängen noch sehr labberig in der Luft. Wäre es hier sinnvoll, die Leitung am APM-Gehäuse oder am Frame an einem Punkt zu fixieren?

ich wollte kurz den aktuellen Stand des Umbaus der Elektronik nach euren Tipps (im Vergleich zu meinem Post #1) zeigen. Von den ESCs sind jetzt nur noch die Signalleitungen und ohne Wickelband angeschlossen. Auch das BEC (ganz oben) hat ausreichende Länge um keine Vibrationen zu übertragen. Der Pieper kommt direkt auf das Gehäuse um gar keine Verbindug zum Frame zu haben.
Lediglich die Leitungen zum Stromsensor gefallen mir noch nicht. Hängen noch sehr labberig in der Luft. Wäre es hier sinnvoll, die Leitung am APM-Gehäuse oder am Frame an einem Punkt zu fixieren?
Hallo Leute,
ich hatte einen Vergleich der Vibrationen vor und nach den Optimierungen versprochen. Heute konnte ich den ersten Flug in 2014 absolvieren. Hier das Ergebnis:
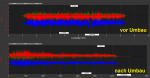
Man sieht, dass die Vibrationen reduziert werden konnten.
ABER: Leider sind diese immer noch größer als die hier angegebenen Werten von -3 .. +3 für X- und Y-Achsen. Allerdings habe ich bis jetzt nur die Leitungsverlegung optimiert. Das Motor-/Propellerauswuchten war bis jetzt weiterhin wenig erfolgreich. Ein lautes Geschnarre bei gewissen Drehzahlen im Flug ist wahrscheinlich ein deutliches Indiz, dafür dass etwas nicht i.O. ist. Leider finde ich das Problem nicht und muss wahrscheinlich sukzessive Motoren/Propeller austauschen bis das Problem irgendwann weg ist.
Grüße,
Bastian
ich hatte einen Vergleich der Vibrationen vor und nach den Optimierungen versprochen. Heute konnte ich den ersten Flug in 2014 absolvieren. Hier das Ergebnis:
Man sieht, dass die Vibrationen reduziert werden konnten.
ABER: Leider sind diese immer noch größer als die hier angegebenen Werten von -3 .. +3 für X- und Y-Achsen. Allerdings habe ich bis jetzt nur die Leitungsverlegung optimiert. Das Motor-/Propellerauswuchten war bis jetzt weiterhin wenig erfolgreich. Ein lautes Geschnarre bei gewissen Drehzahlen im Flug ist wahrscheinlich ein deutliches Indiz, dafür dass etwas nicht i.O. ist. Leider finde ich das Problem nicht und muss wahrscheinlich sukzessive Motoren/Propeller austauschen bis das Problem irgendwann weg ist.
Grüße,
Bastian
Eine Verbesserung ist zwar zu sehen aber die Werte sind dennoch sehr hoch.
Wie lässt er sich denn fliegen und tunen?
Jedoch sollte man auch nicht zu viel Aufmerksamkeit einzelner Messwerten zuordnen, eher das ganze Regelsystem begutachten und unterm Strich bewerten.
Falls es dir etwas hilft, ich habe lange mit der Optimierung der Motoren, Lagertausch, Lager in Öl, Glocke Optimieren, Propeller schleifen, usw. verbracht, alles was man immer so schön in den weiten jener Foren so lesen kann! ;-)
Irgendwann habe ich festgestellt dass alle Maßnahmen keine größer Verbesserung gebracht haben, In meinem Fall wurden die Propeller mit Ihrer 8m Bohrung mit den üblen- Adapterringen auf 6mm Prop.Mitnehmer reduziert und durch die schräge und leicht verschobene Auflage der Propeller hatten alle einen leichten Höhenschlag. Dieser war aber durch keine der Optimierungen betrachtet worden.
Dieser eine Effekt ist sicher um Größenordnungen Entscheidender als die letzten 0,1% Verbesserungen durch schleifen einer Glocke und das Austauschen der Lager.
Fazit: Keep it Simple und immer das ganze System im Auge behalte.
Mehr und teurere Komponenten hilft nicht immer! ...Das optimieren der Kabelvibrationen halte ich auch eher für eine untergeordnete Größenordnung!
So kann man mit den billigsten Motoren (zb. Suppo2212-13 aus einem China-Hinterhof) und den billigsten 10x4,7 für 0,9€ Props, ohne Magic-Alphapads und Festverschraubten APM-Board schon recht gute Werte erhalten.
Zum Beispiel:

Größer:

Viel Erfolg!
Wie lässt er sich denn fliegen und tunen?
Jedoch sollte man auch nicht zu viel Aufmerksamkeit einzelner Messwerten zuordnen, eher das ganze Regelsystem begutachten und unterm Strich bewerten.
Falls es dir etwas hilft, ich habe lange mit der Optimierung der Motoren, Lagertausch, Lager in Öl, Glocke Optimieren, Propeller schleifen, usw. verbracht, alles was man immer so schön in den weiten jener Foren so lesen kann! ;-)
Irgendwann habe ich festgestellt dass alle Maßnahmen keine größer Verbesserung gebracht haben, In meinem Fall wurden die Propeller mit Ihrer 8m Bohrung mit den üblen- Adapterringen auf 6mm Prop.Mitnehmer reduziert und durch die schräge und leicht verschobene Auflage der Propeller hatten alle einen leichten Höhenschlag. Dieser war aber durch keine der Optimierungen betrachtet worden.
Dieser eine Effekt ist sicher um Größenordnungen Entscheidender als die letzten 0,1% Verbesserungen durch schleifen einer Glocke und das Austauschen der Lager.
Fazit: Keep it Simple und immer das ganze System im Auge behalte.
Mehr und teurere Komponenten hilft nicht immer! ...Das optimieren der Kabelvibrationen halte ich auch eher für eine untergeordnete Größenordnung!
So kann man mit den billigsten Motoren (zb. Suppo2212-13 aus einem China-Hinterhof) und den billigsten 10x4,7 für 0,9€ Props, ohne Magic-Alphapads und Festverschraubten APM-Board schon recht gute Werte erhalten.
Zum Beispiel:
Größer:
Viel Erfolg!
Soweit ich dies beurteilen kann, fliegt er gut. Habe noch keinen Vergleich, da dies mein erster Quad ist, erfliegt aber ähnlich wie ein traditioneller Heli und dabei präzise. Meiner Meinung nach hält er im Loiter jedoch nicht besonders gut die Position. Auch hier habe ich keinen Vergleich, begeistert hat mich Loiter jedoch noch nicht. Kann dies an zu starken Vibrationen liegen? (Ich werde demnächst mal ein Video machen).
Deine Messwerte sehen wirklich gut aus und ich kann deine Argumentation auch nachvollziehen. Vielleicht habe tatsächlich ein grundlegendes Problem mit der Propellerbefestigung bzw Motor-/Propellerkombination.
Ich verwende diese Propeller auf Flyduino 2216 900KV (Version 1) Motoren. Evtl. ist diese Kombination bzw. diese alte Motorversion (siehe hier) schon problematisch und wurde daher auf eine Version 2 aktualisiert?
Dann kann ich natürlich lange an der Elektrik und den Klebepads optimieren...
Deine Messwerte sehen wirklich gut aus und ich kann deine Argumentation auch nachvollziehen. Vielleicht habe tatsächlich ein grundlegendes Problem mit der Propellerbefestigung bzw Motor-/Propellerkombination.
Ich verwende diese Propeller auf Flyduino 2216 900KV (Version 1) Motoren. Evtl. ist diese Kombination bzw. diese alte Motorversion (siehe hier) schon problematisch und wurde daher auf eine Version 2 aktualisiert?
Dann kann ich natürlich lange an der Elektrik und den Klebepads optimieren...
Hallo nochmal,
ich bin auf die Ursache des Schnarrens und wahrscheinlich auch der Vibrationen gestoßen. Bei mindestens 2 Motoren sind Schleifspuren am Stator bzw. den Magnetem im Rotor zu sehen. Woher dieses Schleifen kommt kann ich nicht sehen, die Lager sehen i.O. aus.
Nun werde ich die Motoren tauschen, eine sinnvolle Alternative sehe ich nicht. Welche Motoren könnt ihr empfehlen, als Austausch zu Flyduiono X2216 v1 900kV Motoren an 11x5er Propellern? Würde es Sinn machen den Propellerdurchmesser zu reduzieren oder wirkt dies nicht stark auf das Vibrationsverhalten bei kleinen Unwuchten aus?
Ich tendiere aktuell zu diesen Motoren. 25€ pro Motor sind angemessen, oder? Deutlich drunter kommt man, für vernünftige Motoren nicht? Ich möchte Vernünftiges einbauen.

Danke und Grüße,
Bastian
ich bin auf die Ursache des Schnarrens und wahrscheinlich auch der Vibrationen gestoßen. Bei mindestens 2 Motoren sind Schleifspuren am Stator bzw. den Magnetem im Rotor zu sehen. Woher dieses Schleifen kommt kann ich nicht sehen, die Lager sehen i.O. aus.
Nun werde ich die Motoren tauschen, eine sinnvolle Alternative sehe ich nicht. Welche Motoren könnt ihr empfehlen, als Austausch zu Flyduiono X2216 v1 900kV Motoren an 11x5er Propellern? Würde es Sinn machen den Propellerdurchmesser zu reduzieren oder wirkt dies nicht stark auf das Vibrationsverhalten bei kleinen Unwuchten aus?
Ich tendiere aktuell zu diesen Motoren. 25€ pro Motor sind angemessen, oder? Deutlich drunter kommt man, für vernünftige Motoren nicht? Ich möchte Vernünftiges einbauen.
Danke und Grüße,
Bastian
Zuletzt bearbeitet:
Schau mal, ob zwischen den Magneten an der Glocke kleine Steinchen oder Sand haften.
Da Straßenbelag, Schotter und das Gekrümel, dass auf manchen Feldwegen liegt aus jeder Menge Schlacke und und anderem Recycling-Gedöns hergestellt wird, ist es eisenhaltig. Das Aufwirbeln des Drecks bei Start und Landung tut dann das Übrige, damit dieser Mist in die Motoren eingesaugt wird und schon hast du diese "Parasiten" im Motor.
Da Straßenbelag, Schotter und das Gekrümel, dass auf manchen Feldwegen liegt aus jeder Menge Schlacke und und anderem Recycling-Gedöns hergestellt wird, ist es eisenhaltig. Das Aufwirbeln des Drecks bei Start und Landung tut dann das Übrige, damit dieser Mist in die Motoren eingesaugt wird und schon hast du diese "Parasiten" im Motor.

