ich kämpfe selbst grade mit den Kompass-Werten meiner kleinen Quadrixette Q40.
Allerdings bin ich grade etwas verwirrt, wie man die tlogs richtig wertet, zumal ich an der Q40 eigentlich recht gute Werte habe, dennoch das Ding immerzu in den TBE verfällt, sobald ich loiter/pos-hold aktiviere.
COMPASS_OFS_X -86,10423
COMPASS_OFS_Y 28,58425
COMPASS_OFS_Z -10,08872
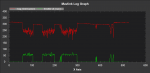
OK, der X-Wert ist noch verbesserungswürdig, aber interessant wirds hier:
man sieht lediglich geringes Rauschen des Magnetfelds, das durch Throttle passiert, aber ich würde das als OK werten.
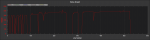
Um so interessanter ist, daß mein Test-Frame (Warthox Quad) laut tlog eigentlich eine relativ starke Beeinflussung des Magfield durch Throttle verursacht, allerdings wird in diesem Fall der Magfield wert mit steigendem Throttle kleiner.
Auch sind hier die Kompass-Werte vergleichsweise schlecht:
COMPASS_OFS_X -185,4769
COMPASS_OFS_Y 126,6665
COMPASS_OFS_Z -3,228762
und dennoch loitert der Warthox mit integriertem Kompass super sauber, während die Q40 selbst mit externen Kompass bis dato keinen stabilen Loiter kann.
Die beiden Copter unterscheiden sich in einigen Dingen:
Der Warthox ist ein absolut symmetrischer Quad mit Stromverteiler direkt im Rahmen und Akku genau zentral an der Unterseite, während die Q40 ein Spider-Frame ist, Verteiler selbst gelötet und der Akku ist hier relativ weit hinten, also alles andere als symmetrisch.
die xmag, ymag, zmag Werte gegenüber Throttle ändern sich auch bei beiden Koptern in unterschiedlichen Maß und Richtung.
Beim Warthox Frame, der perfekt loitert sehe ich mit steigendem Throttle steigenden ymag, während xmag und zmag sinken.
Bei der Q40 mit TBE sehe ich mit steigendem Throttle steigenden xmag und ymag, während xmag sinkt.
Ich bin derzeit mit Randy in Kontakt um der Sache nachzugehen. Auch werde ich mit einem noch größeren Abstand des Kompass testen.
Alles nicht so einfach, aber hochinteressant!
Gruß,
Christian

") ... ist ja nicht das erste Mal.
... ist ja nicht das erste Mal.