
Arducopter - Kurze Frage, Kurze Antwort
- Themenstarter Jace25
- Beginndatum
")
Hallo,
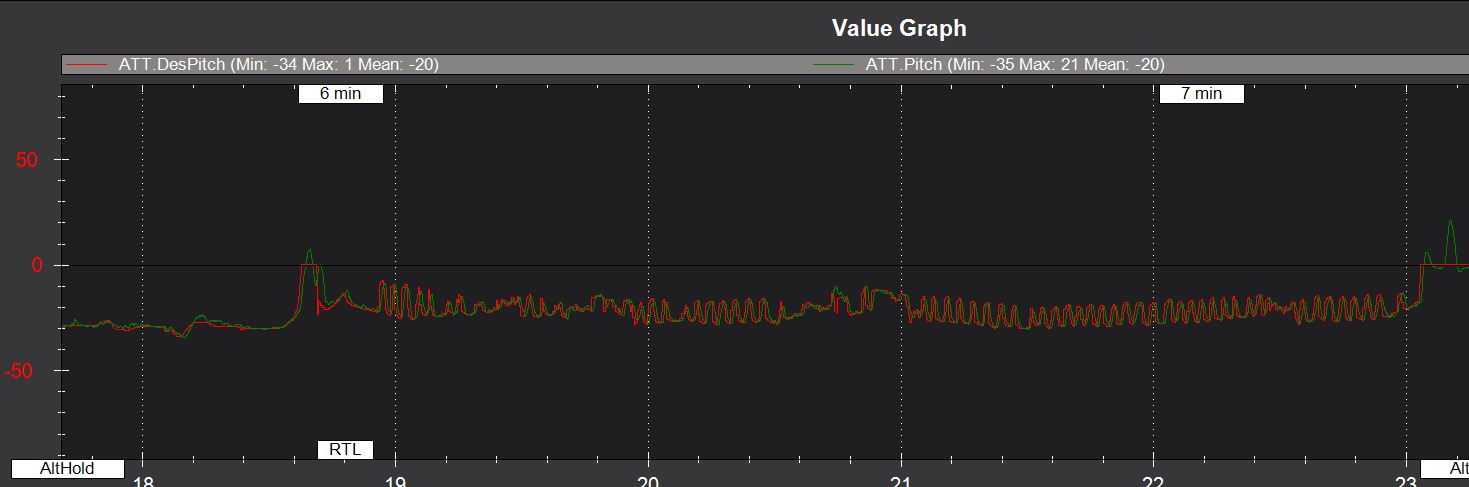
tja, die Frage stellt sich wirklich aber bisher habe ich keine Ahnung woher das kommt. Vibs habe ich eigentlich nicht außer den ganz normalen, die nicht vermeidbar sind bei Propellern. Der APM ist jedenfalls ganz ruhig, wenn man den Finger bei Vollgas drauf legt. DesPitch wird hier aber vom APM selbst gesteuert, nicht von der Funke. Und es war windig, d.h. eine Störgröße wirkte auf den Kopter. Sieht fast aus wie eine Resonanz.
Aber was anderes:
Ich habe mir heute die USB Schnittstelle zerschossen am APM2.8 Ich kenne das aus meiner Zeit als Enwickler von den Arduinos, wo es reichte den USB Stecker einzustecken, während sie bestromt waren, dass der USB Interface Chip sein Flash verlor. Auch bei den PICs reichte es, dass ein Spannungpeak auftrat und das Flash war gelöscht. Habe mich damals tot gesucht warum. Ist mir heute passiert, Akku am Kopter, Stecker rein und Ende war es.
Das USB meldet sich nicht mehr am System an, ist tot. Gibt es da eine Möglichkeit das Flash des Kommunikations Chips, auch ein ATmega16U2 c neu zu flashen? Bzw was müsste da dann für ein Code rein? Der vom Arduino ATmega16U2 ?
tja, die Frage stellt sich wirklich aber bisher habe ich keine Ahnung woher das kommt. Vibs habe ich eigentlich nicht außer den ganz normalen, die nicht vermeidbar sind bei Propellern. Der APM ist jedenfalls ganz ruhig, wenn man den Finger bei Vollgas drauf legt. DesPitch wird hier aber vom APM selbst gesteuert, nicht von der Funke. Und es war windig, d.h. eine Störgröße wirkte auf den Kopter. Sieht fast aus wie eine Resonanz.
Aber was anderes:
Ich habe mir heute die USB Schnittstelle zerschossen am APM2.8 Ich kenne das aus meiner Zeit als Enwickler von den Arduinos, wo es reichte den USB Stecker einzustecken, während sie bestromt waren, dass der USB Interface Chip sein Flash verlor. Auch bei den PICs reichte es, dass ein Spannungpeak auftrat und das Flash war gelöscht. Habe mich damals tot gesucht warum. Ist mir heute passiert, Akku am Kopter, Stecker rein und Ende war es.
Das USB meldet sich nicht mehr am System an, ist tot. Gibt es da eine Möglichkeit das Flash des Kommunikations Chips, auch ein ATmega16U2 c neu zu flashen? Bzw was müsste da dann für ein Code rein? Der vom Arduino ATmega16U2 ?
Zuletzt bearbeitet:
Doch, kann er ..... das Thema hat mich in der Firma vor 2 Jahren mal 2 Tage gekostet, warum mir ein Testaufbau mit einem Arduino Mega Board ständig abrauchte, wenn ich den USB Stecker rein steckte während es von einem Netzteil bestromt war. Habe mich totgesucht damals, 3 neu Boards bestellt weil ich dachte die sind hin, bevor ich merkte, dass nur die Bootloader zerschossen waren. Grad gebrannt, spielt wieder, alles gut! Pixhawk habe ich auch hier aber ich erschiesse ja auch nicht ein altes Pferd, nur weil daneben ein junges Pferd steht.
Hallo,
mache ich vielleicht etwas falsch? Wenn ich bei meinem Pxhawk Kopter die Autotune Funktion einschalte reagiert er zäh wie Honig, eine einzige Zuckung in der Luft, dann wieder sekundenlange Pausen. Überhaupt kein sichtbares "Tunen" und abgespeichert wurde auch nichts nach dem Disarmen. Default Werte sind zwar ok aber auch sehr softig.
Muss man da noch was einschalten? Ich schalte Autotune über Chz7 über einen Kipphebel ein. Gibt ja auhc den Flight Mode Autotune.
Gruss,
Christian
mache ich vielleicht etwas falsch? Wenn ich bei meinem Pxhawk Kopter die Autotune Funktion einschalte reagiert er zäh wie Honig, eine einzige Zuckung in der Luft, dann wieder sekundenlange Pausen. Überhaupt kein sichtbares "Tunen" und abgespeichert wurde auch nichts nach dem Disarmen. Default Werte sind zwar ok aber auch sehr softig.
Muss man da noch was einschalten? Ich schalte Autotune über Chz7 über einen Kipphebel ein. Gibt ja auhc den Flight Mode Autotune.
Gruss,
Christian
Flight mode oder Einzelschalter ist egal. Im Autotune fliegt er zäher. Wenn das Tunen noch nicht fertig war, speichert er auch nix. Genereller Tip: Die Achsen einzeln autotunen. Die meisten Copter schaffen den ganzen Durchgang batteriebedingt eh nicht:
http://ardupilot.org/copter/docs/parameters.html#autotune-axes-autotune-axis-bitmask
http://ardupilot.org/copter/docs/parameters.html#autotune-axes-autotune-axis-bitmask
Hab ich gemerkt, er arbeitet sich sehr zäh durch das Programm durch. Nur Pitch getunt bisher, Werte aber ähnlich meinen voreingestellten, bis auf den sehr hohen Stabilize Pitch Wert von 9. Der liegt bei meinem APM 2.6er Kopter bei 3,5. Ansonsten sind Piuxhawk und APM wie Tag und Nacht. APM ist wie ein Rodeo Ritt mit einem recht temperamentvollen Pferd , mit Pixhawk fliegt er wie auf Schienen durch die Luft, ist selbst im Acro Mode spielend zu beherrschen und der Drift Mode ist wie Flache fliegen.
Wozu dieser "Throw Mode" da ist erschliesst sich mir nicht, werde garantiert keinen 1,8kg Kopter werfen nur um festzustellen, dass die Motoren doch nicht starten bevor er aufschlägt.
Wozu dieser "Throw Mode" da ist erschliesst sich mir nicht, werde garantiert keinen 1,8kg Kopter werfen nur um festzustellen, dass die Motoren doch nicht starten bevor er aufschlägt.
Zuletzt bearbeitet:
Hey, die Logs kommen morgen habe den Flieger leider nicht hier. Keine Verbindung bedeutet für mich wenn der Connect versuch ins nichts läuft und dann kommt nach der zeit ein Timeout. Ist schon was her bei den kalten tagen habe ich weniger mit dem Flieger gemacht, ich hoffe die Logs können mir da weiter helfen.
Schonmal vielen Dank, rest kommt morgen wenn ich die Logs habe
Schonmal vielen Dank, rest kommt morgen wenn ich die Logs habe
Moin,
kann mir jemand erklären was es mit den Terrain Data auf sich hat? Sind das einfach nur offline Karten?
Wo soll ich diese Terrain Data für mein Pixhawk her bekommen?
War heute das erste mal mit meinen Flugzeug draußen im Garten um zu schauen ob das GPS genug Sateliten findet.
Hat nach ein paar Minuten so um die 16 Sats gefunden und 3D Fix ist nun auch i.O.
Habe den Flieger mal ne halbe Stunde auf dem Gartentisch stehen lassen, leider bekomme ich im Mission Planner immer noch die Meldung "Bad or no Terrain Data".
Kann mir da jemand weiterhelfen?
kann mir jemand erklären was es mit den Terrain Data auf sich hat? Sind das einfach nur offline Karten?
Wo soll ich diese Terrain Data für mein Pixhawk her bekommen?
War heute das erste mal mit meinen Flugzeug draußen im Garten um zu schauen ob das GPS genug Sateliten findet.
Hat nach ein paar Minuten so um die 16 Sats gefunden und 3D Fix ist nun auch i.O.
Habe den Flieger mal ne halbe Stunde auf dem Gartentisch stehen lassen, leider bekomme ich im Mission Planner immer noch die Meldung "Bad or no Terrain Data".
Kann mir da jemand weiterhelfen?
Zuletzt bearbeitet:
Hast du im Wiki den Artikel dazu gelesen?
Möchtest du Terrain Follow oder stört dich einfach nur die Fehlermeldung?
Im Normalfall lädt sich Pixhawk bei 3D GPS die benötigten Terrain Daten über Mavlink auf die SD-Karte. Bei Missionen werden die Punkte auch geladen.
Man kann auch die Daten auf der Speicherkarte finden. Sie sind nach der Länge/Breite benannt.
Hast du AC 3.4. drauf?
Möchtest du Terrain Follow oder stört dich einfach nur die Fehlermeldung?
Im Normalfall lädt sich Pixhawk bei 3D GPS die benötigten Terrain Daten über Mavlink auf die SD-Karte. Bei Missionen werden die Punkte auch geladen.
Man kann auch die Daten auf der Speicherkarte finden. Sie sind nach der Länge/Breite benannt.
Hast du AC 3.4. drauf?
Moin,
ArduPlane V3.7.0 habe ich drauf.
http://ardupilot.org/plane/docs/common-terrain-following.html?highlight=terrain data
Auf dieser Seite mit den Terrain following war ich die Tage noch als ich im Wiki nach Terrain Data gesucht habe. Habe es ehrlich gesagt wohl garnicht richtig gecheckt.
Wenn ich das richtig verstehe sind das nur Höhen Daten und brauche diese nur für dieses Terrain follow?
Hier bei mir in Ostfriesland ist nur Flachland ich denke da brauche ich das garnicht...
Das die Daten vom GPS kommen meine ich auch wo gelesen zu haben, deswegen hatte ich den Flieger auch mal etwas länger draußen stehen gelassen
Aber wieso bekomme ich immer noch die Meldung "Bad or no Terrain Data?
Dauer das vielleicht etwas länger bis er die Daten hat, oder was mache ich falsch?
ArduPlane V3.7.0 habe ich drauf.
http://ardupilot.org/plane/docs/common-terrain-following.html?highlight=terrain data
Auf dieser Seite mit den Terrain following war ich die Tage noch als ich im Wiki nach Terrain Data gesucht habe. Habe es ehrlich gesagt wohl garnicht richtig gecheckt.
Wenn ich das richtig verstehe sind das nur Höhen Daten und brauche diese nur für dieses Terrain follow?
Hier bei mir in Ostfriesland ist nur Flachland ich denke da brauche ich das garnicht...
Das die Daten vom GPS kommen meine ich auch wo gelesen zu haben, deswegen hatte ich den Flieger auch mal etwas länger draußen stehen gelassen
Aber wieso bekomme ich immer noch die Meldung "Bad or no Terrain Data?
Dauer das vielleicht etwas länger bis er die Daten hat, oder was mache ich falsch?
Zuletzt bearbeitet:

