
Arducopter - Kurze Frage, Kurze Antwort
- Themenstarter Jace25
- Beginndatum
Da haut nix voll autonom ab  Vollautonom fliegt der nur, wenn ich RTH durch AUTO ersetze, dann fliegt der auch ohne Funke auf und davon. Also 3.3.3. ... stable Version. Wird am Wochenende eingepflanzt, wenn der APM 2.6 chirurgisch entfernt wurde. Werde wohl die Parameter einzeln abtippen müssen, falls kein Import von 3.2.1 auf 3.3.3. möglich.
Vollautonom fliegt der nur, wenn ich RTH durch AUTO ersetze, dann fliegt der auch ohne Funke auf und davon. Also 3.3.3. ... stable Version. Wird am Wochenende eingepflanzt, wenn der APM 2.6 chirurgisch entfernt wurde. Werde wohl die Parameter einzeln abtippen müssen, falls kein Import von 3.2.1 auf 3.3.3. möglich.
Vollautonom fliegt der nur, wenn ich RTH durch AUTO ersetze, dann fliegt der auch ohne Funke auf und davon. Also 3.3.3. ... stable Version. Wird am Wochenende eingepflanzt, wenn der APM 2.6 chirurgisch entfernt wurde. Werde wohl die Parameter einzeln abtippen müssen, falls kein Import von 3.2.1 auf 3.3.3. möglich.Das ist ein neues Feature, hier der Eintrag aus dem Changelog zu 3.4.0:
In Kürze: das passiert nur wenn der Copter gelandet ist, und baut mehr oder weniger das Verhalten der DJI Flugsteuerungen und Copter nach - der Copter gibt erst Gas (mehr als Standgas) sobald man mit dem Stick mehr Gas gegeben hat als fürs Schweben notwendig ist. Ist wahrscheinlich über einen Parameter abschaltbar, im Changelog steht allerdings nicht wie der Parameter dazu genau heißt.
motors speed feedback to pilot while landed - motors only spin up to minimum throttle as throttle stick is brought to mid (previously spun up to 25%)
Hallo,
Hier mal meine beiden Logs aus dem letzten Flug. Ist da alles mit ok?
Habe nicht alles geloggt aber Pitch,Despitch usw.,
https://drive.google.com/file/d/0B9nKwMvhJo9KUWlvX3RnNzNaajA/view?usp=sharing
https://drive.google.com/file/d/0B9nKwMvhJo9KOWNBYVk0VzdPcWs/view?usp=sharing
Hier mal meine beiden Logs aus dem letzten Flug. Ist da alles mit ok?
Habe nicht alles geloggt aber Pitch,Despitch usw.,
https://drive.google.com/file/d/0B9nKwMvhJo9KUWlvX3RnNzNaajA/view?usp=sharing
https://drive.google.com/file/d/0B9nKwMvhJo9KOWNBYVk0VzdPcWs/view?usp=sharing


Hi,
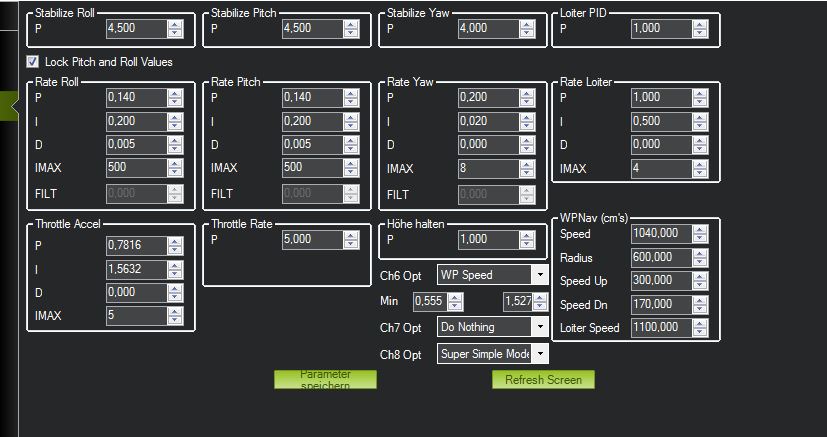
danke Dir!" ja, das habe ich auch bemerkt im Flug, dass er Roll etwas schwammig umsetzt, da ich den in Hand getrimmt habe, also Kopter über Kopf halten und im Acro Mode gespielt, bis er sich "gut" anfühlte. Autotune liefert leider nicht das ich möchte, daher muss ich manuell trimmen. Habe jetzt P einen Tick höher gesetzt und D ebenfalls einen "Tick", von 0,003 auf 0,004.
Hast Du auch noch den Zauber Parameter parat, damit er im AltHold Mode und PosHold etwas flotter steigt? Bei Gas voll auf schleicht er sich nur so nach oben während er sich im Stabilize Mode nach wenigen Sekunden schon im Orbit befindet.
Bei meinem Pixhawk, der heute kam habe ich dann mal 3.3.3 aufgespielt, statt der Default 3.4.0 nachdem hier einige Probleme berichtet wurden.
danke Dir!" ja, das habe ich auch bemerkt im Flug, dass er Roll etwas schwammig umsetzt, da ich den in Hand getrimmt habe, also Kopter über Kopf halten und im Acro Mode gespielt, bis er sich "gut" anfühlte. Autotune liefert leider nicht das ich möchte, daher muss ich manuell trimmen. Habe jetzt P einen Tick höher gesetzt und D ebenfalls einen "Tick", von 0,003 auf 0,004.
Hast Du auch noch den Zauber Parameter parat, damit er im AltHold Mode und PosHold etwas flotter steigt? Bei Gas voll auf schleicht er sich nur so nach oben während er sich im Stabilize Mode nach wenigen Sekunden schon im Orbit befindet.
Bei meinem Pixhawk, der heute kam habe ich dann mal 3.3.3 aufgespielt, statt der Default 3.4.0 nachdem hier einige Probleme berichtet wurden.
Zuletzt bearbeitet:
So, ist mein Problem weg? Sag mal wo Du das gesehen hast....
https://drive.google.com/file/d/0B9nKwMvhJo9Kd0RfZ1BUSnJBNVE/view?usp=sharing
https://drive.google.com/file/d/0B9nKwMvhJo9Kd0RfZ1BUSnJBNVE/view?usp=sharing
Grummel.... gefühlt sieht das schon recht gut aus. Nur bei Yaw Drehungen turnt er gerne mal mit einem Schlenker herum, taumelt etwas um die Yaw Achse. Alleridngs auch bei heftigem Speed. Irgendwo ist ja auch mal Ende bei 8 Bit und der Trägheit des Systems, das Teil ist ja schon viel besser als ich erwartet habe. Ich denke es ist das beste, wenn ich mir DesRoll und Roll mal life auf den Bildschirm hole beim Flug über den 433 Mhz Link und dann solage frickel, bis die beiden sich fast decken, denn ganz geht ja nicht.
Der kollege mag kein stabilize. die Phasen, wo man viel sehen kann sind rar. yaw sieht nicht so schlimm aus. die klassische tuningregel gilt hier aber auch nicht. man fliegt da eigentlich ohne "d" Anteil.
Generell:
stimmt so nicht ganz. wenn d raufgesetz wurde, muß p auch noch mal hoch. für i gilt die klassische regel I=P bis 2,5*P.
Der Kollege Superhobel bzw Elektroniker hier hat da schon Erfahrung, was passiert, wenn man zu wenig I hat.
Generell:
Also P (Roll) rauf bis Vibrationen, dann D, am Ende noch ein Schuß I.
Der Kollege Superhobel bzw Elektroniker hier hat da schon Erfahrung, was passiert, wenn man zu wenig I hat.
Hallo,
ich war heute nochmal im Feld, habe die Logs jetzt so, dass Roll und DesRoll sich deutlich mehr decken. Optisch sieht es aber schon etwas nach Überschwingen aus, der Kopter liegt sehr "scharf" in der Luft, Knüppel scharf links heisst auch, dass er scharf links zieht, Knüppel in die Mitte, er zieht genau scharf wieder gerade. Ok, nicht so ganz tragisch, die Werte sind auch sehr hart eingestellt jetzt. Stabilze gefällt mir jetzt so wie es ist, ist auch mein meist geflogener Mode.
Aber dafür ein anderes Problem:
Bei den GPS gestützten Modi, vor allem Drift habe ich ein starkes Aufschwingen bei höheren Geschwindigkeiten. Hoch = 60 km/h. Das geht soweit, dass ich Sorge habe, dass er sich nicht mehr fängt, da er zb in einer Drift Kurve in ein Taumeln übergeht. Im PosHold und Stillstand in der Luft habe ich auch leichte Schwinger, er schwingt leicht um die Roll Achse. Und mit zu wenig I driftet er nunmal im Wind ab,
@hulk: Bist ja auch "angezählt" worden. Wirst allerdings keinen einzigen Beitrag mehr von mir finden, da hat jemand meine Existenz und 320 Beiträge vollständig "ausgelöscht", fast schon hasserfüllt "ausradiert".
ich war heute nochmal im Feld, habe die Logs jetzt so, dass Roll und DesRoll sich deutlich mehr decken. Optisch sieht es aber schon etwas nach Überschwingen aus, der Kopter liegt sehr "scharf" in der Luft, Knüppel scharf links heisst auch, dass er scharf links zieht, Knüppel in die Mitte, er zieht genau scharf wieder gerade. Ok, nicht so ganz tragisch, die Werte sind auch sehr hart eingestellt jetzt. Stabilze gefällt mir jetzt so wie es ist, ist auch mein meist geflogener Mode.
Aber dafür ein anderes Problem:
Bei den GPS gestützten Modi, vor allem Drift habe ich ein starkes Aufschwingen bei höheren Geschwindigkeiten. Hoch = 60 km/h. Das geht soweit, dass ich Sorge habe, dass er sich nicht mehr fängt, da er zb in einer Drift Kurve in ein Taumeln übergeht. Im PosHold und Stillstand in der Luft habe ich auch leichte Schwinger, er schwingt leicht um die Roll Achse. Und mit zu wenig I driftet er nunmal im Wind ab,
@hulk: Bist ja auch "angezählt" worden. Wirst allerdings keinen einzigen Beitrag mehr von mir finden, da hat jemand meine Existenz und 320 Beiträge vollständig "ausgelöscht", fast schon hasserfüllt "ausradiert".
Zuletzt bearbeitet:
Es ist diese "Nützliche Glasfaser" hier, die mit 2213er/935kv Mots an 4s befeuert ist. Frame für 18 Euro, etwas noch versteift und das Teil tut es. Mit ca 1,4kg an 4,5kg Schub startet der senkrecht direkt in den Orbit (in 1 Min auf 400m), erreicht bei 50 Grad Neigung ca. 80 km/h und hat mit 5000mah/4s eine Streckenleistung von ca 6-7km.
https://www.amazon.de/Foxnovo-Nützliche-Glasfaser-MikroKopters-Quadcopter/dp/B00MNBG0JY
https://www.amazon.de/Foxnovo-Nützliche-Glasfaser-MikroKopters-Quadcopter/dp/B00MNBG0JY
Zuletzt bearbeitet:

