
FrSky S6R Empfänger mit 3 Achsen-Gyro & 3 Achsen-Beschleunigungssensor für Flugzeuge
- Themenstarter helle
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hallo,
nachdem ich diese Woche den STK Stick bekommen habe, und die Treiberprobleme des Sticks in den Griff bekommen habe, sieht mein Setup eigentlich ganz ordentlich aus. Allerdings sind noch ein paar Sachen offen:
Wegkalibrierung: Am Anfang habe ich eine Krise bekommen weil die Servos nur sehr merkwürdig reagiert haben. Die Anleitung zur Weganlernung scheint wohl auch nicht zu stimmen. Weiß jemand, wann der Servoweg angelernt wird(Beim Selbsttest (Blaue LED an, oder danach (Anleitung)).
Initialisierung beim einschalten: Ich kenne es von einigen FCs das nach dem einschalten der Beschleunigungssensor kalibriert wird. In der Anleitung des S6R liest es sich aber so als würde beim einschalten auch jedes Mal der Gyro kalibriert(Modell sollte gerade liegen, etc.). Ist das wirklich so? Oder wird nur durch den Selbsttest über K12 neu gelevelt? Ich hoffe nicht das man bei jedem einschalten Leveln muss.
Failsafe: Wie programmiere ich den failsafe im Empfänger? Das klassische Prozedere löst ja den Selbsttest aus.
Trimmung: Kann ich in jedem Modus nach belieben trimmen oder müssen die Nullpunkte in Stab und Autolevel 1500 betragen?
Ich hoffe mir kann jemand ein paar Tips geben....
Gregor
nachdem ich diese Woche den STK Stick bekommen habe, und die Treiberprobleme des Sticks in den Griff bekommen habe, sieht mein Setup eigentlich ganz ordentlich aus. Allerdings sind noch ein paar Sachen offen:
Wegkalibrierung: Am Anfang habe ich eine Krise bekommen weil die Servos nur sehr merkwürdig reagiert haben. Die Anleitung zur Weganlernung scheint wohl auch nicht zu stimmen. Weiß jemand, wann der Servoweg angelernt wird(Beim Selbsttest (Blaue LED an, oder danach (Anleitung)).
Initialisierung beim einschalten: Ich kenne es von einigen FCs das nach dem einschalten der Beschleunigungssensor kalibriert wird. In der Anleitung des S6R liest es sich aber so als würde beim einschalten auch jedes Mal der Gyro kalibriert(Modell sollte gerade liegen, etc.). Ist das wirklich so? Oder wird nur durch den Selbsttest über K12 neu gelevelt? Ich hoffe nicht das man bei jedem einschalten Leveln muss.
Failsafe: Wie programmiere ich den failsafe im Empfänger? Das klassische Prozedere löst ja den Selbsttest aus.
Trimmung: Kann ich in jedem Modus nach belieben trimmen oder müssen die Nullpunkte in Stab und Autolevel 1500 betragen?
Ich hoffe mir kann jemand ein paar Tips geben....
Gregor
Zuletzt bearbeitet:
Wegkalibrierung: Am Anfang habe ich eine Krise bekommen weil die Servos nur sehr merkwürdig reagiert haben. Die Anleitung zur Weganlernung scheint wohl auch nicht zu stimmen. Weiß jemand, wann der Servoweg angelernt wird(Beim Selbsttest (Blaue LED an, oder danach (Anleitung)).
Ich kenne es von einigen FCs das nach dem einschalten der Beschleunigungssensor kalibriert wird. In der Anleitung des S6R liest es sich aber so als würde beim einschalten auch jedes Mal der Gyro kalibriert(Modell sollte gerade liegen, etc.).
-(ACC-)Beschleunigungssensor misst die Gravitation (Erdbeschleunigung), erkennt also die Lage der Achsen zum Erdmittelpunkt. Falls eine Achse zum Erdmittelpunkt zeigt (Im Normalflug die Hochachse), ist eine Drehung um diese Achse ohne Auswirkung auf den ACC Wert.
-Gyro misst die Winkelgeschwindigkeit der drei Achsen
ACC erkennt also die Lage im Raum, Gyro erkennt, ob eine Drehung um eine der Achsen erfolgt
Mit diesen Informationen kann man sich das Regelverhalten des S6R ganz plausibel erklären. Meines Erachtens muss das Modell beim Einschalten ruhig stehen, damit der Gyro "genullt" werden kann. Ändert sich etwas, wenn das Modell beim Einschalten auf dem Kopf liegt? Sollte man mal probieren.
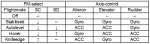
Mein Flugphasendiagramm habe ich mal erweitert, hilft vielleicht ein bißchen:
Failsafe: Wie programmiere ich den failsafe im Empfänger? Das klassische Prozedere löst ja den Selbsttest aus.
Trimmung: Kann ich in jedem Modus nach belieben trimmen oder müssen die Nullpunkte in Stab und Autolevel 1500 betragen?
Gruß Bernd
Zuletzt bearbeitet:
Was hast du festgestellt?
Als ich dann die Wegkalibrierung Anders als in der Anleitung beschrieben, während die blaue LED an war gemacht habe stand plötzlich der gesamte Knüppelweg in beide Richtungen zur Verfügung.
Vielleicht sollte man mal klar unterscheiden, was die beiden Sensorarten machen:
-(ACC-)Beschleunigungssensor misst die Gravitation (Erdbeschleunigung), erkennt also die Lage der Achsen zum Erdmittelpunkt. Falls eine Achse zum Erdmittelpunkt zeigt (Im Normalflug die Hochachse), ist eine Drehung um diese Achse ohne Auswirkung auf den ACC Wert.
-Gyro misst die Winkelgeschwindigkeit der drei Achsen
ACC erkennt also die Lage im Raum, Gyro erkennt, ob eine Drehung um eine der Achsen erfolgt
Mit diesen Informationen kann man sich das Regelverhalten des S6R ganz plausibel erklären. Meines Erachtens muss das Modell beim Einschalten ruhig stehen, damit der Gyro "genullt" werden kann. Ändert sich etwas, wenn das Modell beim Einschalten auf dem Kopf liegt? Sollte man mal probieren.
-(ACC-)Beschleunigungssensor misst die Gravitation (Erdbeschleunigung), erkennt also die Lage der Achsen zum Erdmittelpunkt. Falls eine Achse zum Erdmittelpunkt zeigt (Im Normalflug die Hochachse), ist eine Drehung um diese Achse ohne Auswirkung auf den ACC Wert.
-Gyro misst die Winkelgeschwindigkeit der drei Achsen
ACC erkennt also die Lage im Raum, Gyro erkennt, ob eine Drehung um eine der Achsen erfolgt
Mit diesen Informationen kann man sich das Regelverhalten des S6R ganz plausibel erklären. Meines Erachtens muss das Modell beim Einschalten ruhig stehen, damit der Gyro "genullt" werden kann. Ändert sich etwas, wenn das Modell beim Einschalten auf dem Kopf liegt? Sollte man mal probieren.
Failsafe: Also ist der Aufdruck "F/S" auf dem Empfänger auch ein Fehler.
Bis jetzt sehe ich keinen Grund für oder gegen 1500 us als Nullpunkt, außer dass es guter Stil ist, in der Mitte des Bereiches zu bleiben. Dieser Thread trägt ja erstmal die Informationen zusammen, deswegen ist es noch zu früh, hier fertige Informationen abzufragen. Mir ist auch Einiges noch nicht 100% klar.
Gruß Bernd
Gruß Bernd
Vielen Dank für die ausführliche Antwort
Gruß Gregor
Moin,
interessante Beobachtung zur Wegkalibrierung, bei mir hat sie gleich fuktioniert, aber ich glaube, so wie in der Anleitung beschrieben. Das werde ich nochmal testen.
Die ACC Sensoren messen natürlich auch de Beschleunigungen des Modells (Motor, Quer, Böen, Aufprall , etc.), aber die werden nicht zur Lageregelung benutzt. Das habe ich oben schlecht formuliert.
, etc.), aber die werden nicht zur Lageregelung benutzt. Das habe ich oben schlecht formuliert.
Bei der Lageregelung mit Hilfe des ACC Sensors wird die Modellachse auf eine bestimmte Richtung zur Erdachse festgenagelt. Bei Hoover z.B. muss die Gravitation für die Hochachse 0 und für die Längsachse 1 (oder -1?) sein. Die genaue Lage der Achsen kann in der Konfiguration beeinflusst werden. Der Einfluss unserer Steuerbewegungen gegen die Lageregelung kann über den Gain-Wert in der Konfiguraton beeinflusst werden. Trimmen ist eine konstante Steuerbewegung.
Eine Besonderheit ist der Autolevelmodus: Hier kann man die Position des Modells (vor Allem den Anstellwinkel) beim Selbsttest anlernen. Ob diese Anlernen auch die beiden anderen Fluglageregelungen beeinflußt, habe ich noch nicht probiert.
So reime ich mir zusammen, was ich bisher beobachtet habe.
Gruß Bernd
interessante Beobachtung zur Wegkalibrierung, bei mir hat sie gleich fuktioniert, aber ich glaube, so wie in der Anleitung beschrieben. Das werde ich nochmal testen.
Die ACC Sensoren messen natürlich auch de Beschleunigungen des Modells (Motor, Quer, Böen, Aufprall
, etc.), aber die werden nicht zur Lageregelung benutzt. Das habe ich oben schlecht formuliert.Bei der Lageregelung mit Hilfe des ACC Sensors wird die Modellachse auf eine bestimmte Richtung zur Erdachse festgenagelt. Bei Hoover z.B. muss die Gravitation für die Hochachse 0 und für die Längsachse 1 (oder -1?) sein. Die genaue Lage der Achsen kann in der Konfiguration beeinflusst werden. Der Einfluss unserer Steuerbewegungen gegen die Lageregelung kann über den Gain-Wert in der Konfiguraton beeinflusst werden. Trimmen ist eine konstante Steuerbewegung.
Eine Besonderheit ist der Autolevelmodus: Hier kann man die Position des Modells (vor Allem den Anstellwinkel) beim Selbsttest anlernen. Ob diese Anlernen auch die beiden anderen Fluglageregelungen beeinflußt, habe ich noch nicht probiert.
So reime ich mir zusammen, was ich bisher beobachtet habe.
Gruß Bernd
so .... nun habe ich das alles hier durchgelesen und auch die Hardware mal durchprobiert.
So ganz klar ist mir aber einiges nicht.
Wie lernt man die Wege an und speichert sie ab ?
Ich habe Ch12 auf einem Taster, der nur aktiv ist, wenn der Motorschalter auf aus (Gas aus) steht.
So wird verhindert, daß der Kanal ausgelöst werden kann, wenn das Modell freigegeben ist (Gas ein).
Wenn ich Ch12 auslöse erscheint eine blaue LE am S6R und nach kurzer Zeit laufen die Servos kurz hin und her.
Nach den Aussagen hier, soll man nun die Ruder alle mal auf maximalen Ausschlag bewegen.
Dannach sind die Ausschläge abgespeichert ?
Soweit so gut ....
Wenn ich nun den Empfänger einschalte, erscheint wieder die blaue LED und die Servos laufen kurz hin und her.
die Stabilisierung funktioniert aber erst, wenn ich die Knüppel wieder bewegt habe.
Ist das normal ?
Oder wo mache ich etwas falsch ?
So ganz klar ist mir aber einiges nicht.
Wie lernt man die Wege an und speichert sie ab ?
Ich habe Ch12 auf einem Taster, der nur aktiv ist, wenn der Motorschalter auf aus (Gas aus) steht.
So wird verhindert, daß der Kanal ausgelöst werden kann, wenn das Modell freigegeben ist (Gas ein).
Wenn ich Ch12 auslöse erscheint eine blaue LE am S6R und nach kurzer Zeit laufen die Servos kurz hin und her.
Nach den Aussagen hier, soll man nun die Ruder alle mal auf maximalen Ausschlag bewegen.
Dannach sind die Ausschläge abgespeichert ?
Soweit so gut ....
Wenn ich nun den Empfänger einschalte, erscheint wieder die blaue LED und die Servos laufen kurz hin und her.
die Stabilisierung funktioniert aber erst, wenn ich die Knüppel wieder bewegt habe.
Ist das normal ?
Oder wo mache ich etwas falsch ?
Sollte heißen: ca. 6 Sekunden nach dem Start des Selbsttest winken die Servos. Dann die Sticks bewegen. Man hat relativ viel Zeit dazu. Wie lange genau, habe ich nicht probiert. Kann auch sein, dass der S6R wartet, bis alle Kanäle eingelernt wurden. Wenn du Zeit hast und einen schönen Probeaufbau, kannst du ja mal testen.
Ich würde beim Test einfach Querruder Input abwechselnd auf 20% und 100% gewichten. Dann anlernen und mal Knifeedge aktivieren, dann macht der S6R Vollausschlag Quer und du kannst sehen, ob der geänderte Wert angelernt wurde, oder nicht.
Ich würde beim Test einfach Querruder Input abwechselnd auf 20% und 100% gewichten. Dann anlernen und mal Knifeedge aktivieren, dann macht der S6R Vollausschlag Quer und du kannst sehen, ob der geänderte Wert angelernt wurde, oder nicht.
Wahrscheinlich. Aber per opentx gehts auch super
Umstecken und umschalten nicht vergessen.
Ich misshandle meine Smartportgeräte seit Jahren mit der RS232 Schnittstelle.
Zuletzt bearbeitet:
So...
nun wollte ich meinen S6R updaten mit dem STK Modul.
Also Umschalter auf Update.
Stecker auf Anschluß 2.
Sport.exe gestartet.
Comport 3 wird erkannt.
Dann wähle ich die Software aus ...S6R161109 -> S6R_161109.frk (Non EU)
Bei Sport.exe fängt das rechte obere Feld grün zu blinken an.
"finding device" ....
das wars dann ????
Wer hat das schon mal gemacht ?
Wo liegt der Fehler ?
Beschreibung gibts natürlich mal wieder nix ......
nun wollte ich meinen S6R updaten mit dem STK Modul.
Also Umschalter auf Update.
Stecker auf Anschluß 2.
Sport.exe gestartet.
Comport 3 wird erkannt.
Dann wähle ich die Software aus ...S6R161109 -> S6R_161109.frk (Non EU)
Bei Sport.exe fängt das rechte obere Feld grün zu blinken an.
"finding device" ....
das wars dann ????
Wer hat das schon mal gemacht ?
Wo liegt der Fehler ?
Beschreibung gibts natürlich mal wieder nix ......
Zuletzt bearbeitet:
Beim Update mit FTDI Chips war da was das man den Rx erst während dem Finding Device anstecken bzw. mit Spannung versorgen darf damit dieser auch wirklich mit seinem Bootloader startet.
der USB3-Adapter von Frsky scheint das irgendwie automatisch zu machen.
- nächste Frage ist dann ob der verwendete USB-Port genug Strom fürs Update liefern kann..
( also kein Hub dazwischen, keine Servos mit am Empfänger ....)
Ralf
der USB3-Adapter von Frsky scheint das irgendwie automatisch zu machen.
- nächste Frage ist dann ob der verwendete USB-Port genug Strom fürs Update liefern kann..
( also kein Hub dazwischen, keine Servos mit am Empfänger ....)
Ralf
Zuletzt bearbeitet:
Ich habe alles nochmal gemacht.
Also Umschalter auf Update.
Stecker auf Anschluß 2.
Sport.exe gestartet.
Comport 3 wird in der Liste oben erkannt.
Unten steht "com3 file not available"
Dann wähle ich die File aus ...
Das rechte rote Feld beginnt grün zu blinken ....
Unten steht "findung device"
UND ERST JETZT DEN S6R AN DEN STK-ADAPTER ANSCHLIESSEN !!!
Danke an Ralf für den Tip !
Dann auf Download klicken und das Update beginnt ....
Geht doch einfach ... wenn man weiß wie !
Also Umschalter auf Update.
Stecker auf Anschluß 2.
Sport.exe gestartet.
Comport 3 wird in der Liste oben erkannt.
Unten steht "com3 file not available"
Dann wähle ich die File aus ...
Das rechte rote Feld beginnt grün zu blinken ....
Unten steht "findung device"
UND ERST JETZT DEN S6R AN DEN STK-ADAPTER ANSCHLIESSEN !!!
Danke an Ralf für den Tip !
Dann auf Download klicken und das Update beginnt ....
Geht doch einfach ... wenn man weiß wie !
- Status
- Nicht offen für weitere Antworten.

