
FunFly Controller Naze 32
- Themenstarter JUERGEN_
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Selbst noch nicht getestet, aber evtl. Läuft die hier:
http://code.google.com/p/mw-wingui/
http://code.google.com/p/mw-wingui/
Zuletzt bearbeitet:
Hallo Flieger
Hab es jetzt geschafft die Acro Naze32 mit Baro und Kompaß nachzurüsten.
Obwohl ich in solchen Arbeiten alles andere als versiert bin, hats geklappt.
Der Baro hat beim Anlöten mit Heißluft zuerst zicken gemacht, aber hab ihn dann mit dem Lötkolben noch nachgebessert dann gings.
Nicht unbedingt schön, aber selten.


Gruß
Hab es jetzt geschafft die Acro Naze32 mit Baro und Kompaß nachzurüsten.
Obwohl ich in solchen Arbeiten alles andere als versiert bin, hats geklappt.
Der Baro hat beim Anlöten mit Heißluft zuerst zicken gemacht, aber hab ihn dann mit dem Lötkolben noch nachgebessert dann gings.
Nicht unbedingt schön, aber selten.
Gruß
du gehst auf den naze per "putty" und gibst "help" ein, ist eigentlich alles gut beschrieben...
Mini FunFly Flight Controller “Naze32” (
Command Line Interface / configuration
Command Line Interface (hereafter CLI) is used to configure most functions of the board.
A terminal program (such as PuTTY or HyperTerminal) should be used.
Download PuTTY from http://www.chiark.greenend.org.uk/~sgtatham/putty/
Connect to USB Serial port at 115200 baud,
8bit, no parity, 1 stop bit. These are default
settings for most terminal programs. To enter
CLI, type ‘#’ into the terminal.
A message will be printed,
Entering CLI Mode, type 'exit' to return, or 'help'
Command line is interactive, and most commands will print something in return.
Available commands:
help print out a list of all commands with short description of each
defaults reset all settings to built in defaults, and reboot
feature enable, disable, or list enabled features (such as CPPM input, GPS, etc)
map configure RC channel mapping for CPPM and standard receiver
cmix create custom motor mix for non-standard airframe type
mixer set or show current multirotor mixer (such as Quad-/Hexa-/etc)
set set or list available parameters. Many settings are available.
status print out system status (voltage, uptime, enabled sensors, etc)
version print out firmware version and build date/time
save/exit save settings and reboot
WARNING Any changes to settings in cli, in particular related to motor output (throttle
values, etc) are accepted REALTIME and may result in motors starting up without warning.
Always configure with props disconnected or when model is only powered by USB.
Common usage examples:
To enable CPPM receiver, enable PPM feature:
# feature ppm
# save
To disable battery voltage monitoring, disable VBAT feature:
# feature -vbat
# save
To enable camera stabilization and change mixer to Quad-Plus:
# mixer quadp
# feature servo_tilt
# save
To configure CPPM receiver for EATR channel order and swap AUX1/2:
# map EATR2134
#save
Settings are applied real-time, however not saved until ‘save’ or ‘exit’ command is executed.
Mini FunFly Flight Controller “Naze32” (
Command Line Interface / configuration
Command Line Interface (hereafter CLI) is used to configure most functions of the board.
A terminal program (such as PuTTY or HyperTerminal) should be used.
Download PuTTY from http://www.chiark.greenend.org.uk/~sgtatham/putty/
Connect to USB Serial port at 115200 baud,
8bit, no parity, 1 stop bit. These are default
settings for most terminal programs. To enter
CLI, type ‘#’ into the terminal.
A message will be printed,
Entering CLI Mode, type 'exit' to return, or 'help'
Command line is interactive, and most commands will print something in return.
Available commands:
help print out a list of all commands with short description of each
defaults reset all settings to built in defaults, and reboot
feature enable, disable, or list enabled features (such as CPPM input, GPS, etc)
map configure RC channel mapping for CPPM and standard receiver
cmix create custom motor mix for non-standard airframe type
mixer set or show current multirotor mixer (such as Quad-/Hexa-/etc)
set set or list available parameters. Many settings are available.
status print out system status (voltage, uptime, enabled sensors, etc)
version print out firmware version and build date/time
save/exit save settings and reboot
WARNING Any changes to settings in cli, in particular related to motor output (throttle
values, etc) are accepted REALTIME and may result in motors starting up without warning.
Always configure with props disconnected or when model is only powered by USB.
Common usage examples:
To enable CPPM receiver, enable PPM feature:
# feature ppm
# save
To disable battery voltage monitoring, disable VBAT feature:
# feature -vbat
# save
To enable camera stabilization and change mixer to Quad-Plus:
# mixer quadp
# feature servo_tilt
# save
To configure CPPM receiver for EATR channel order and swap AUX1/2:
# map EATR2134
#save
Settings are applied real-time, however not saved until ‘save’ or ‘exit’ command is executed.
Ja das habe ich ja auch gefunden was mir nur gerade auffällt ist,
wie ist dann die X8 Motor Nummerierung ? Wo finde ich die Info auch in der CLI ?
wie ist dann die X8 Motor Nummerierung ? Wo finde ich die Info auch in der CLI ?
ansonsten ist die Motorbelegung auf Seite 6
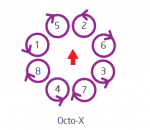
Images below show motor numbering and propeller rotation for various supported mixes.
The number corresponds to the motor index (M1 to M8) from Fig 3. Motor connections.
NOTE Configurations with more than 6 motors require CPPM receiver.
The number corresponds to the motor index (M1 to M8) from Fig 3. Motor connections.
NOTE Configurations with more than 6 motors require CPPM receiver.
und Anschlüsse auf Seite 3 / Fig 3
Zuletzt bearbeitet:
So habe mir die notwendigen Info direkt beim TimeCop geholt bzw. bestätigen lassen.
Also falls jemand die Lust für einen X8 Copter mit dem Naze32 verspürt
1 - REAR_R
2 - FRONT_R
3 - REAR_L
4 - FRONT_L
5 - UNDER_REAR_R
6 - UNDER_FRONT_R
7 - UNDER_REAR_L
8 - UNDER_FRONT_L
so sollten dann die Motoren aufgebaut werden.
mixer octox8
Drehrichtung ist wie bei der normalen multiwii
http://www.multiwii.com/wp-content/uploads/2011/01/OCTOX8_328-300x281.jpg
Ich werde es dann die Tage damit versuchen.
Also falls jemand die Lust für einen X8 Copter mit dem Naze32 verspürt
1 - REAR_R
2 - FRONT_R
3 - REAR_L
4 - FRONT_L
5 - UNDER_REAR_R
6 - UNDER_FRONT_R
7 - UNDER_REAR_L
8 - UNDER_FRONT_L
so sollten dann die Motoren aufgebaut werden.
mixer octox8
Drehrichtung ist wie bei der normalen multiwii
http://www.multiwii.com/wp-content/uploads/2011/01/OCTOX8_328-300x281.jpg
Ich werde es dann die Tage damit versuchen.
Zuletzt bearbeitet:
Hallo zusammen,
morgen möchte ich gerne bei meinen beiden zwei Naze Controlern (Acro und Naze32) die Firmware flashen. Beide sollen mit OSD, Bluetoothmodul, Kamera mit Pan/Tilt bestückt werden.
Bei einem (Naze32) kommt GPS zum Einsatz.
Nun zur eigentlichen Frage:
Was für eine Firmware empfehlt Ihr. Mit GPS die 225er (wurde vor längerer Zeit mal hier im Thread empfohlen) und ohne GPS die aktuelle 237er? Oder gibt es schon Änderungen das bei beiden Varianten die aktuelleste 237er genommen werden kann oder habt Ihr ggf. anderwaige Empfehlungen?
Gruß Oliver
morgen möchte ich gerne bei meinen beiden zwei Naze Controlern (Acro und Naze32) die Firmware flashen. Beide sollen mit OSD, Bluetoothmodul, Kamera mit Pan/Tilt bestückt werden.
Bei einem (Naze32) kommt GPS zum Einsatz.
Nun zur eigentlichen Frage:
Was für eine Firmware empfehlt Ihr. Mit GPS die 225er (wurde vor längerer Zeit mal hier im Thread empfohlen) und ohne GPS die aktuelle 237er? Oder gibt es schon Änderungen das bei beiden Varianten die aktuelleste 237er genommen werden kann oder habt Ihr ggf. anderwaige Empfehlungen?
Gruß Oliver
mein naze 32 ist mittlerweile auch eingetroffen
derzeit mache ich mir gedanken über den aufbau und die verkabelung. bevor ich jetzt was zerschiesse ein paar fragen bitte, auf die ich auf die schnelle keine defitive anleitung gefunden habe.
beim alten nanowii 0.5 gab es 2 lötbrücken die es zu beachten galt.
1x zum befeuern mit strom, in diesem fall durfte keine weitere stromquelle angeschlossen sein.
1x als "weiche" zur befeuerung des nanowii über ESC-BEC oder direkt vom lipo, das waren die JP1/2 auf dem nano.
beim naze finde ich nichts an info dazu.
kann ich wahlweise ESC-BEC oder direkt am lipo anschliessen, ohne es dem naze mitzuteilen?
wenn ich das naze 32 über ein ESC-BEC oder den lipo direkt mit strom versorge, kann ich dann problemlos parallel USB anschliessen zum konfigurieren?'
da ich zunächst mal mag/baro aussen vor lassen möchte, wie kann ich diese komplett deaktivieren in der software?
grüsse
der skyfreak
derzeit mache ich mir gedanken über den aufbau und die verkabelung. bevor ich jetzt was zerschiesse ein paar fragen bitte, auf die ich auf die schnelle keine defitive anleitung gefunden habe.
beim alten nanowii 0.5 gab es 2 lötbrücken die es zu beachten galt.
1x zum befeuern mit strom, in diesem fall durfte keine weitere stromquelle angeschlossen sein.
1x als "weiche" zur befeuerung des nanowii über ESC-BEC oder direkt vom lipo, das waren die JP1/2 auf dem nano.
beim naze finde ich nichts an info dazu.
kann ich wahlweise ESC-BEC oder direkt am lipo anschliessen, ohne es dem naze mitzuteilen?
wenn ich das naze 32 über ein ESC-BEC oder den lipo direkt mit strom versorge, kann ich dann problemlos parallel USB anschliessen zum konfigurieren?'
da ich zunächst mal mag/baro aussen vor lassen möchte, wie kann ich diese komplett deaktivieren in der software?
grüsse
der skyfreak
- Status
- Nicht offen für weitere Antworten.

