
Produktthread Hammerhead Nano - klappbarer Nanokopter
- Themenstarter Felias
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
@ tim19386
hallo Tim, damit das Anlernen der ESC mit dem Multiwii Programm sicher funktioniert muß man ggf. den Code ändern, hier habe ich geschrieben wie es geht.
Hatte heute auch mein Maiden mit dem Hammerhead (jedenfalls draußen, im Zimmer bin ich schon früher geflogen). Traumhaftes Wetter bei uns, 15°C und Sonne.
Abfluggewicht 390g mit 1000mAh bzw. 400g mit 1300mAh Akku. Dabei Fluguzeiten von gut 6min. bzw. gut 9min. Leichter Wind, bin flott geflogen. Nach ca. 2/3 der Zeit merkt man schon ein Nachlassen der Leistung, allerdings nicht so brutal wie du es beschrieben hast.
Grüße Ingo
hallo Tim, damit das Anlernen der ESC mit dem Multiwii Programm sicher funktioniert muß man ggf. den Code ändern, hier habe ich geschrieben wie es geht.
Hatte heute auch mein Maiden mit dem Hammerhead (jedenfalls draußen, im Zimmer bin ich schon früher geflogen). Traumhaftes Wetter bei uns, 15°C und Sonne.
Abfluggewicht 390g mit 1000mAh bzw. 400g mit 1300mAh Akku. Dabei Fluguzeiten von gut 6min. bzw. gut 9min. Leichter Wind, bin flott geflogen. Nach ca. 2/3 der Zeit merkt man schon ein Nachlassen der Leistung, allerdings nicht so brutal wie du es beschrieben hast.
Grüße Ingo
Nein, hatten Umgebungstemperatur.
Die Zuleitungen zu den Motoren haben bei mir 0,5 Quadrat. 0,25 scheint mir doch etwas gering - auch wenn der Draht im Motor selbst nicht dicker ist. Die Zuleitungen sind ja doch gute 10cm lang.
Für mich hört sich die Leistungsschwäche bei deinem HH aber eher nach nicht ganz aufmachenden ESC's an.
Jetzt gehe ich aber erst noch eine Runde Fliegen ...
Grüße
Die Zuleitungen zu den Motoren haben bei mir 0,5 Quadrat. 0,25 scheint mir doch etwas gering - auch wenn der Draht im Motor selbst nicht dicker ist. Die Zuleitungen sind ja doch gute 10cm lang.
Für mich hört sich die Leistungsschwäche bei deinem HH aber eher nach nicht ganz aufmachenden ESC's an.
Jetzt gehe ich aber erst noch eine Runde Fliegen ...
Grüße
Zuletzt bearbeitet:
Hallo Carsten,
wie infinity553 schon begeistert schrieb, das ist das "Findme" - Signal.
Wenns nervt:
In Alarms.cpp ändern:
#if defined(FAILSAFE)
if ( failsafeCnt > (5*FAILSAFE_DELAY) && f.ARMED) {
alarmArray[1] = 1; //set failsafe warning level to 1 while landing
if (failsafeCnt > 5*(FAILSAFE_DELAY+FAILSAFE_OFF_DELAY)) alarmArray[1] = 2; //start "find me" signal after landing
}
if ( failsafeCnt > (5*FAILSAFE_DELAY) && !f.ARMED) alarmArray[1] = 2; // tx turned off while motors are off: start "find me" signal
if ( failsafeCnt == 0) alarmArray[1] = 0; // turn off alarm if TX is okay
#endif
Das ist der verantwortliche Code-Abschnitt.
Die Zeile:
if ( failsafeCnt > (5*FAILSAFE_DELAY) && !f.ARMED) alarmArray[1] = 2; // tx turned off while motors are off: start "find me" signal
auskommentieren, dann sollte Ruhe sein.
Alternativ: Den Wert 5*FAILSAFE_DELAY höher setzen, vielleicht auf 100*FAILSAFE_DELAY, dann daurt es länger bis der Alarm einsetzt.
Hab beides noch nicht probiert, aber mich nevt das Signal auch - jedenfalls in der Wohnung. Draußen könnte es aber extrem nützlich sein - jedenfalls, wenn es lauter wäre!
wie infinity553 schon begeistert schrieb, das ist das "Findme" - Signal.
Wenns nervt:
In Alarms.cpp ändern:
#if defined(FAILSAFE)
if ( failsafeCnt > (5*FAILSAFE_DELAY) && f.ARMED) {
alarmArray[1] = 1; //set failsafe warning level to 1 while landing
if (failsafeCnt > 5*(FAILSAFE_DELAY+FAILSAFE_OFF_DELAY)) alarmArray[1] = 2; //start "find me" signal after landing
}
if ( failsafeCnt > (5*FAILSAFE_DELAY) && !f.ARMED) alarmArray[1] = 2; // tx turned off while motors are off: start "find me" signal
if ( failsafeCnt == 0) alarmArray[1] = 0; // turn off alarm if TX is okay
#endif
Das ist der verantwortliche Code-Abschnitt.
Die Zeile:
if ( failsafeCnt > (5*FAILSAFE_DELAY) && !f.ARMED) alarmArray[1] = 2; // tx turned off while motors are off: start "find me" signal
auskommentieren, dann sollte Ruhe sein.
Alternativ: Den Wert 5*FAILSAFE_DELAY höher setzen, vielleicht auf 100*FAILSAFE_DELAY, dann daurt es länger bis der Alarm einsetzt.
Hab beides noch nicht probiert, aber mich nevt das Signal auch - jedenfalls in der Wohnung. Draußen könnte es aber extrem nützlich sein - jedenfalls, wenn es lauter wäre!
Hallo,
nachdem ich den Entwicklungsthread und den Produktthread immer mitgelesen habe war es ende Januar soweit das ich mir den HH mit der Dämpfungplatte bestellt hab.
Da ich so einige 3S Akkus in meiner Sammlung habe fiel die Wahl dann auf ein 3S Setup.
Vorige Woche hatte ich dann alle Teile soweit zusammen:
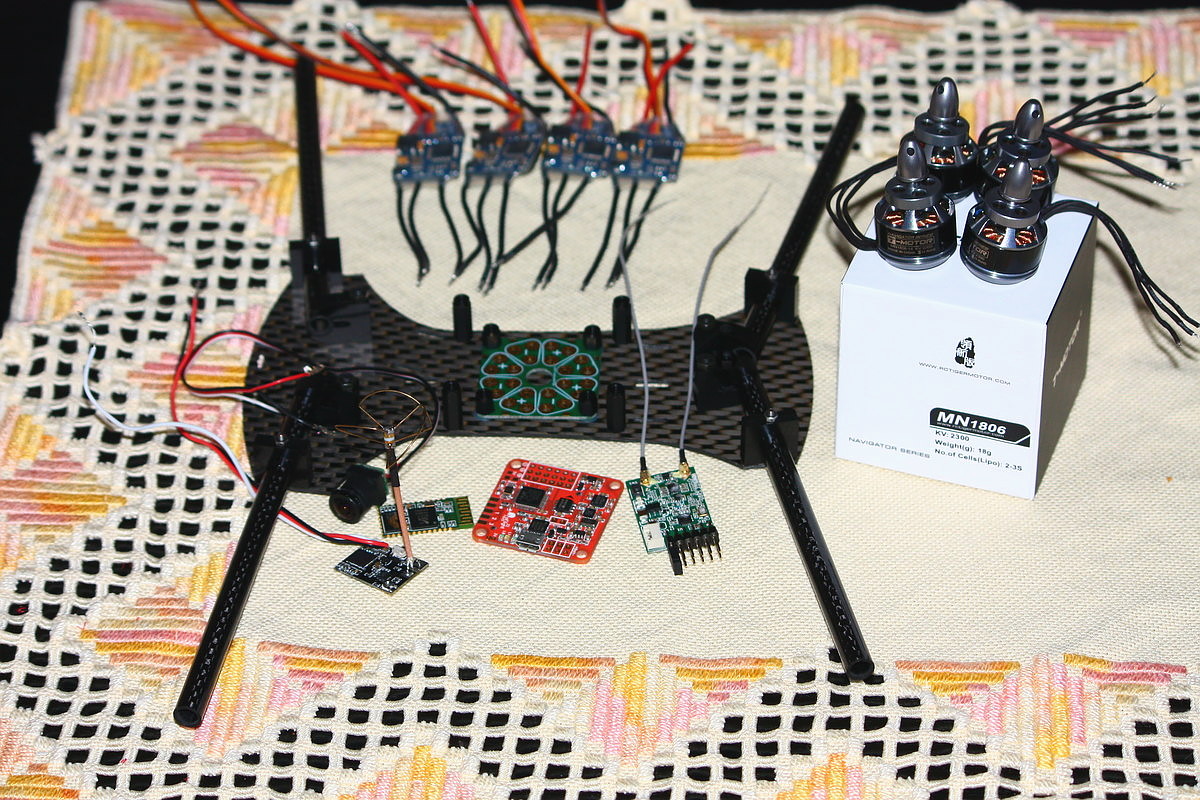
HH Carbon mit Dämpfungsplatte
Tiger MN 1806
Bulltech Premium ESC 12A mit SimonK schon geflasht ( nachdem der HH 1 Tag bei mir war gab es bei Nic auch ESC für 3S)
Naze32 ( rev5)
Stromverteilungsboard von Abusemark
FrSky D4r-II Emfpänger
HC05 Bluetooth Modul
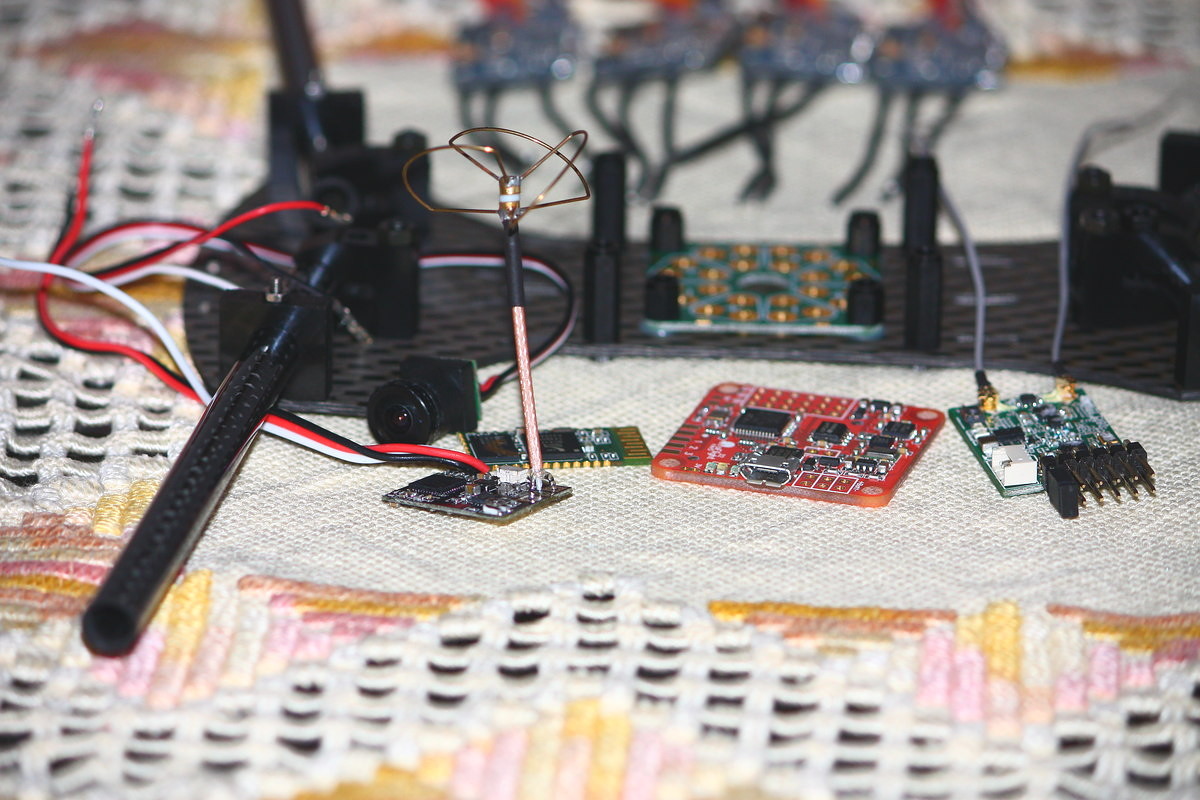
1,5 Gramm Cam mit WIDE ANGLE LENS FOR NANO CAMERA und 1,9 Gramm Videosender von FPV Hobby ( hatte ich schon länger da)
GPS Ublox NEO-6M von Drotek ( noch nicht vorhanden )
Letzte Woche dann mit dem Zusammenbau begonnen was dank der guten Anleitung kein Problem ist. Bei den ESC musste ich den Schrumpfschlauch etwas entfernen um gut an die Anschlüsse zu löten ( hab die verlängerten Motorkabel direkt an den ESC angelötet.) und damit die ESC noch gut reinpassen. Die hinteren schauen minimal über der Grundplatte hinaus, macht aber auch beim Zusammenklappen nichts.
Leider hatte ich einen ESC kaputtgemacht, Das vorhandene Lot schmilzt wohl erst ab 500 Grad Unter der Lötstelle ist noch eine Durchkontaktierung -> weggerissen. Mit Draht wieder hergestellt dabei warscheinlich einen Kurzschluss gebaut-> magischer Rauch. Also musste ich noch einen nachbestellen. Beim anlöten der Anschlüsse gleich noch die Drehrichtung der Motoren eingestellt.
Unter der Lötstelle ist noch eine Durchkontaktierung -> weggerissen. Mit Draht wieder hergestellt dabei warscheinlich einen Kurzschluss gebaut-> magischer Rauch. Also musste ich noch einen nachbestellen. Beim anlöten der Anschlüsse gleich noch die Drehrichtung der Motoren eingestellt.
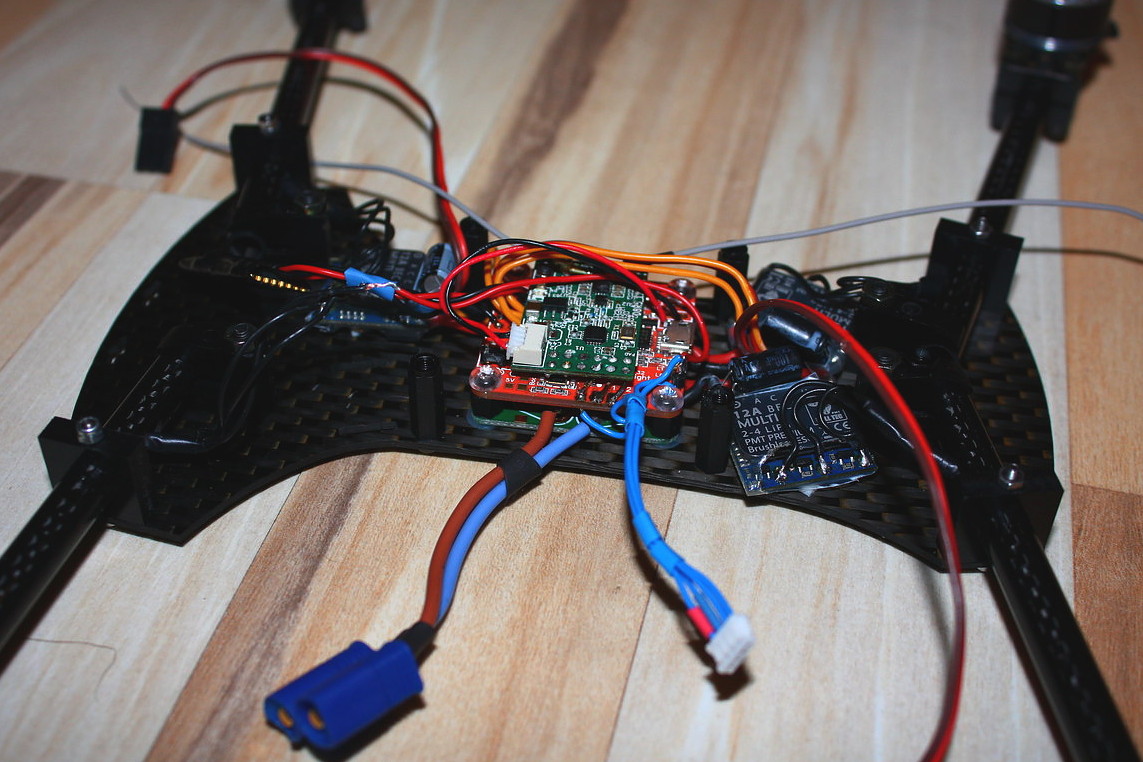
Den Empfänger hab ich huckepack auf die Naze geklebt, die Anschlüsse nur etwas verlängert und die Brücke für das Summensignal eingelötet, alle anderen Anschlüsse entfernt. Somit passt das noch über die naze. Gleichzeitig hält der Empfänger auch noch den Schaumstoff über den Baro fest.
Bei den MN1806 gehts auf der Motorträgerplatte doch ganz schön eng zu, die Muttern liegen am Motor an. Einen halben od. ganzen mm größere Motorträgerplatte würde sicherlich gut tun.

Bei den Tiger MN1806 bin ich aber von der Laufruhe enttäuscht. Im Gegensatz zu den MT2216 die ich auf dem TBS verbaut hab, gibts bei den 1806 schon ohne Propeller einiges an Vibrationen. Bei einen solch einen hohen Preis der Motoren hab ich mehr erwartet. Da kann man sicher von HK auch welche nehmen wo ich 4 Stück zum Preis eines 1806 bekomme.
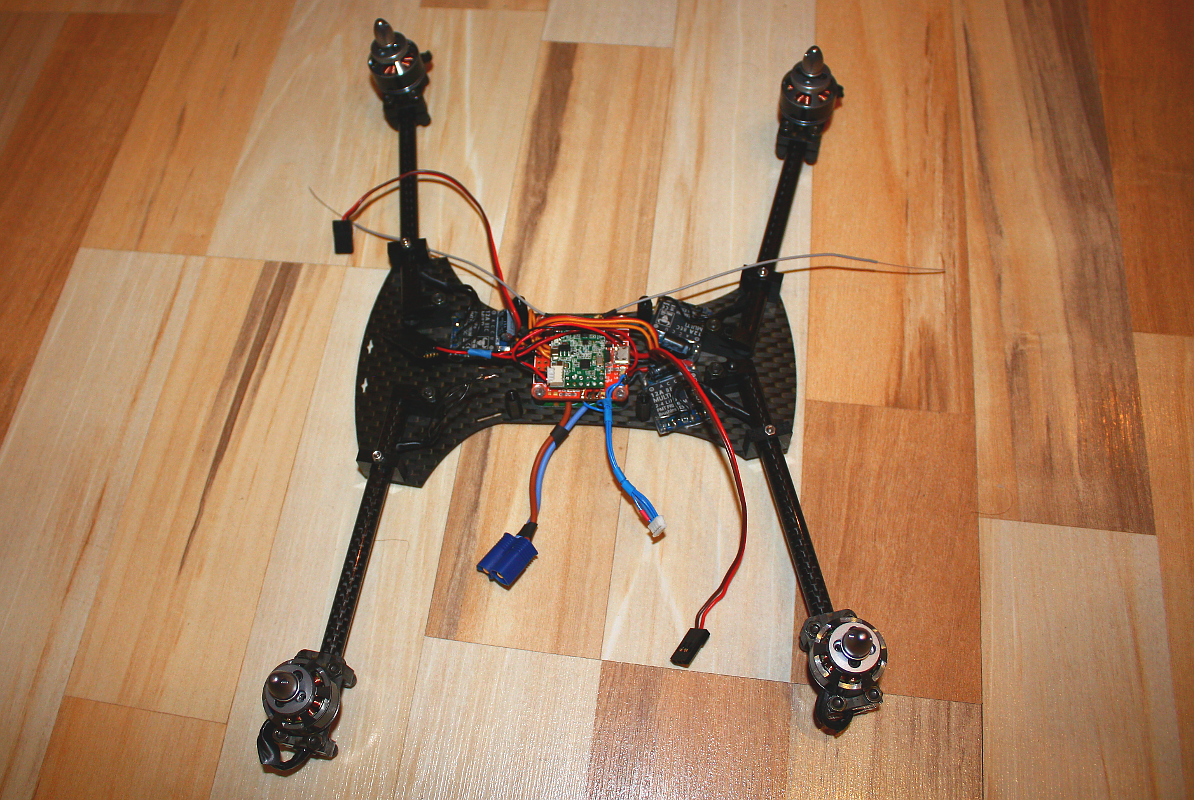
Dieses Wochenende dann fertig gebaut

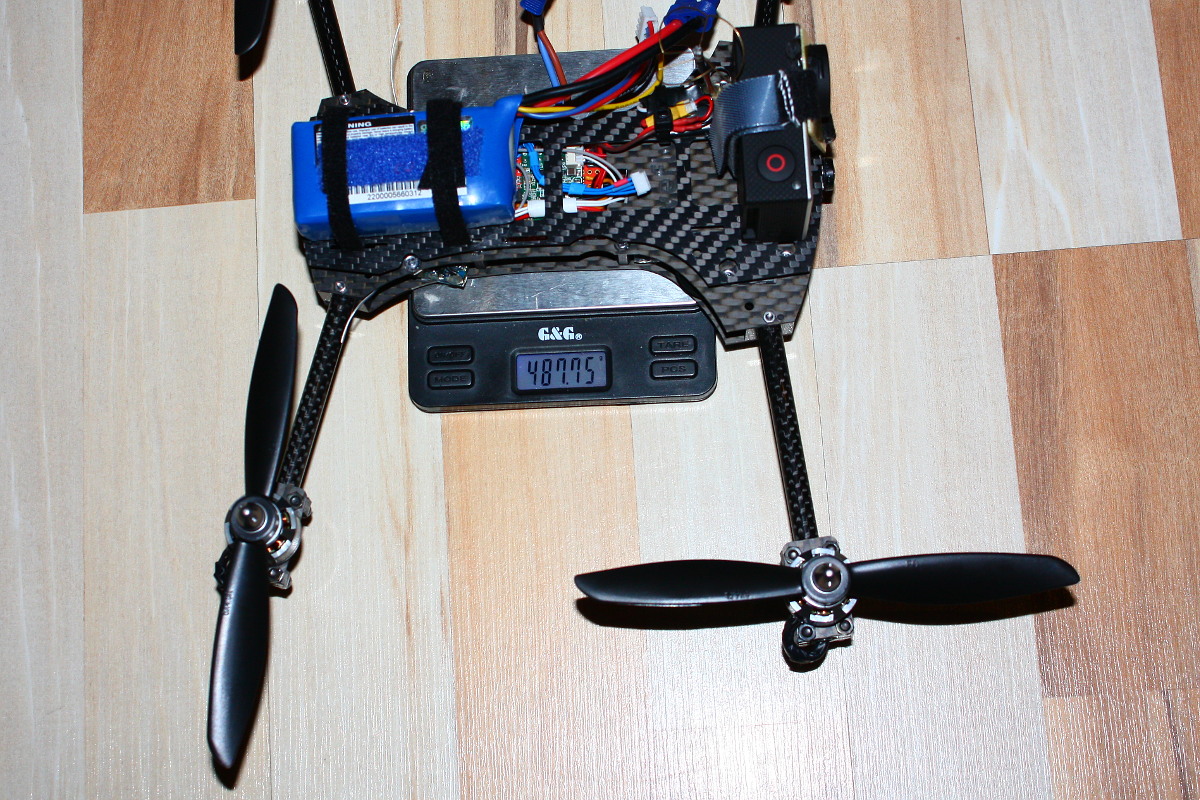
Zusammen mit dem GPS werden dann wohl knapp über 300 Gramm herauskommen.
Mit Akku 1300maH

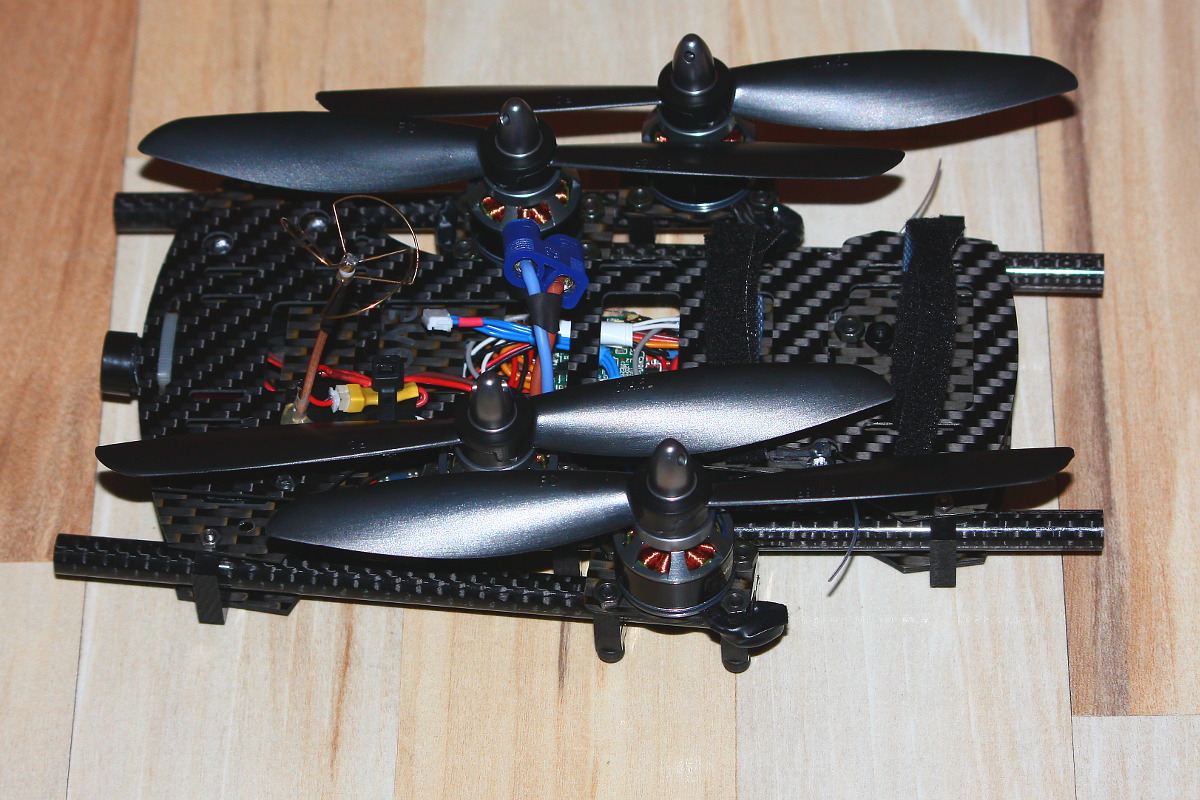
Sogar die GoPro passt noch mit drauf ( leider linker Prop leicht im Bild)

Die Motorenausrichtung mit dem Plättchen hab ich jetzt so nicht hinbekommen da die Motoren auf einer ebenen Fläche ja gar nicht aufliegen sondern die Grundplatte mit den Schrauben aufliegt. Außerdem lassen sich die Arme leicht verdrehen da die M2 Schraube ein klein wenig zu viel Spiel in der dafür vorgesehen Bohrung im Caron Rohr. Für die M2 Muttern wäre vieleicht eine selbssichernde Mutter besser ( hab ich leider nur noch 2 Stück von einen alten Heli 300X hier rumliegen)
Bei den MN1806 Motoren waren nur 4 M2 Schrauben dabei hab jetzt 2 für die Befestigung der Motoren an der Grundplatte und 2 für den Propeller Adapter genommen. reicht das?
Leider hab ich erst nachdem ich alle Teile da hatte gelesen das die rev5 Naze nicht richtig mit Harakiri kompatibel ist, hab aber ne Version von Carsten gefunden die doch funktioniert. Konfiguration mach ich mit dem Handy und Multiwii EZ-GUI , der Naze32 Configurator stürzt ab bei der SG2.6 Harakiri.
Propeller hab ich momentan die 6x4,5 von Nic drauf.
Heute dann probeschweben Indoor, hat leicht gewobbelt beim steigen. P Roll und Pitch auf 2,5 gesenkt klappt schon ganz gut.
Mit der Gopro drauf ca 6 Min 30 geschwebt und dann 930 mAh nachgeladen. Hab noch 2,2 Ah Nano Tech da sollte problemlos über 10 Min drin sein ( ohne Gopro) Schwebegas bei ca 40% ohne Gopro und knapp 50% mit Gopro.
Im Acromode recht quirlig, im auto-level sehr gut zu steuern. Erster Eindruck das Leistung ohne Ende da ist
Noch zu lösende Probleme:
Hab den BEC eines ESC für die Versorgung der Naze, ein anderer versorgt die Cam und der dritte den Videosender. Hab da leider recht viel Störungen im Bild und die ESC werden im Leerlauf schon recht warm, denke da sind einfache Linearregler drin. Beim runterregeln muss dann alles in Wärme verheizt werden. Leerlauf (naze Bluetooth , Cam, Videosender) ca 580 mA * ca 7 Volt = ca 4 Watt Verlustleistung in Wärme. Daher werde ich mir warscheinlich einen Pololu 5V 600mA Step-Down Spannungsregler D24V6F5 zulegen. Da ist? dann gleich ein LC Filter mit drin? Andere Vorschläge?
Was habt ihr denn mit den Empfänger Antennen gemacht? So richtig gefällt mir nicht das die 2 Antennen einfach seitlich herausschauen.
Abschirmung GPS Modul welches über der Naze kommt? etwas Leiterplattenmaterial zwischen GPS und Dämpfungplatte?
Laut Telemetrie( auf meiner Taranis) kommt vom Baro nach dem armen und etwas Gas damit die Motoren drehen 0-1 m Höhe
danach geht auf 1300 m Höhe und manchmal auf 635 m ( was meiner Höhe über NN hier entspricht) da traue ich mich gar nicht den Baro mit hinzuzuschalten. Baroproblem od. Telemetrieproblem? Leider gibts nach dem Armen keine Daten via Bluetooth?
Fazit: hat Spaß gemacht den HH zusammenzubauen ein Outdoor Test steht noch an aber bei dem Wind heute getraue ich mich nicht raus, grade bei einer FC die neu für mich ist.
jk
nachdem ich den Entwicklungsthread und den Produktthread immer mitgelesen habe war es ende Januar soweit das ich mir den HH mit der Dämpfungplatte bestellt hab.
Da ich so einige 3S Akkus in meiner Sammlung habe fiel die Wahl dann auf ein 3S Setup.
Vorige Woche hatte ich dann alle Teile soweit zusammen:
HH Carbon mit Dämpfungsplatte
Tiger MN 1806
Bulltech Premium ESC 12A mit SimonK schon geflasht ( nachdem der HH 1 Tag bei mir war gab es bei Nic auch ESC für 3S)
Naze32 ( rev5)
Stromverteilungsboard von Abusemark
FrSky D4r-II Emfpänger
HC05 Bluetooth Modul
1,5 Gramm Cam mit WIDE ANGLE LENS FOR NANO CAMERA und 1,9 Gramm Videosender von FPV Hobby ( hatte ich schon länger da)
GPS Ublox NEO-6M von Drotek ( noch nicht vorhanden )
Letzte Woche dann mit dem Zusammenbau begonnen was dank der guten Anleitung kein Problem ist. Bei den ESC musste ich den Schrumpfschlauch etwas entfernen um gut an die Anschlüsse zu löten ( hab die verlängerten Motorkabel direkt an den ESC angelötet.) und damit die ESC noch gut reinpassen. Die hinteren schauen minimal über der Grundplatte hinaus, macht aber auch beim Zusammenklappen nichts.
Leider hatte ich einen ESC kaputtgemacht, Das vorhandene Lot schmilzt wohl erst ab 500 Grad
Unter der Lötstelle ist noch eine Durchkontaktierung -> weggerissen. Mit Draht wieder hergestellt dabei warscheinlich einen Kurzschluss gebaut-> magischer Rauch. Also musste ich noch einen nachbestellen. Beim anlöten der Anschlüsse gleich noch die Drehrichtung der Motoren eingestellt.
Den Empfänger hab ich huckepack auf die Naze geklebt, die Anschlüsse nur etwas verlängert und die Brücke für das Summensignal eingelötet, alle anderen Anschlüsse entfernt. Somit passt das noch über die naze. Gleichzeitig hält der Empfänger auch noch den Schaumstoff über den Baro fest.
Bei den MN1806 gehts auf der Motorträgerplatte doch ganz schön eng zu, die Muttern liegen am Motor an. Einen halben od. ganzen mm größere Motorträgerplatte würde sicherlich gut tun.
Bei den Tiger MN1806 bin ich aber von der Laufruhe enttäuscht. Im Gegensatz zu den MT2216 die ich auf dem TBS verbaut hab, gibts bei den 1806 schon ohne Propeller einiges an Vibrationen. Bei einen solch einen hohen Preis der Motoren hab ich mehr erwartet. Da kann man sicher von HK auch welche nehmen wo ich 4 Stück zum Preis eines 1806 bekomme.
Dieses Wochenende dann fertig gebaut
Zusammen mit dem GPS werden dann wohl knapp über 300 Gramm herauskommen.
Mit Akku 1300maH
Sogar die GoPro passt noch mit drauf ( leider linker Prop leicht im Bild)
Die Motorenausrichtung mit dem Plättchen hab ich jetzt so nicht hinbekommen da die Motoren auf einer ebenen Fläche ja gar nicht aufliegen sondern die Grundplatte mit den Schrauben aufliegt. Außerdem lassen sich die Arme leicht verdrehen da die M2 Schraube ein klein wenig zu viel Spiel in der dafür vorgesehen Bohrung im Caron Rohr. Für die M2 Muttern wäre vieleicht eine selbssichernde Mutter besser ( hab ich leider nur noch 2 Stück von einen alten Heli 300X hier rumliegen)
Bei den MN1806 Motoren waren nur 4 M2 Schrauben dabei hab jetzt 2 für die Befestigung der Motoren an der Grundplatte und 2 für den Propeller Adapter genommen. reicht das?
Leider hab ich erst nachdem ich alle Teile da hatte gelesen das die rev5 Naze nicht richtig mit Harakiri kompatibel ist, hab aber ne Version von Carsten gefunden die doch funktioniert. Konfiguration mach ich mit dem Handy und Multiwii EZ-GUI , der Naze32 Configurator stürzt ab bei der SG2.6 Harakiri.
Propeller hab ich momentan die 6x4,5 von Nic drauf.
Heute dann probeschweben Indoor, hat leicht gewobbelt beim steigen. P Roll und Pitch auf 2,5 gesenkt klappt schon ganz gut.
Mit der Gopro drauf ca 6 Min 30 geschwebt und dann 930 mAh nachgeladen. Hab noch 2,2 Ah Nano Tech da sollte problemlos über 10 Min drin sein ( ohne Gopro) Schwebegas bei ca 40% ohne Gopro und knapp 50% mit Gopro.
Im Acromode recht quirlig, im auto-level sehr gut zu steuern. Erster Eindruck das Leistung ohne Ende da ist
Noch zu lösende Probleme:
Hab den BEC eines ESC für die Versorgung der Naze, ein anderer versorgt die Cam und der dritte den Videosender. Hab da leider recht viel Störungen im Bild und die ESC werden im Leerlauf schon recht warm, denke da sind einfache Linearregler drin. Beim runterregeln muss dann alles in Wärme verheizt werden. Leerlauf (naze Bluetooth , Cam, Videosender) ca 580 mA * ca 7 Volt = ca 4 Watt Verlustleistung in Wärme. Daher werde ich mir warscheinlich einen Pololu 5V 600mA Step-Down Spannungsregler D24V6F5 zulegen. Da ist? dann gleich ein LC Filter mit drin? Andere Vorschläge?
Was habt ihr denn mit den Empfänger Antennen gemacht? So richtig gefällt mir nicht das die 2 Antennen einfach seitlich herausschauen.
Abschirmung GPS Modul welches über der Naze kommt? etwas Leiterplattenmaterial zwischen GPS und Dämpfungplatte?
Laut Telemetrie( auf meiner Taranis) kommt vom Baro nach dem armen und etwas Gas damit die Motoren drehen 0-1 m Höhe
danach geht auf 1300 m Höhe und manchmal auf 635 m ( was meiner Höhe über NN hier entspricht) da traue ich mich gar nicht den Baro mit hinzuzuschalten. Baroproblem od. Telemetrieproblem? Leider gibts nach dem Armen keine Daten via Bluetooth?
Fazit: hat Spaß gemacht den HH zusammenzubauen ein Outdoor Test steht noch an aber bei dem Wind heute getraue ich mich nicht raus, grade bei einer FC die neu für mich ist.
jk
Also der Sender wird nach kurzer Zeit schon recht warm, hab das Ding ja eingeschrumfpt und augeklebt und gesichert mit einen Kabelbinder.
Leistung ist einstellbar, hab die Stromaufnahme gemessen und langsam runtergedreht bis der Strom auf ein Minimum war, dann wieder etwas hoch. So sollten 20mW anliegen. Hab bis jetzt immer noch ein paar ganz kurze Störungen drauf wobei ich noch nicht weiß ob es vom Sender Cam od. Stromversorgung kommt. Reichweite noch keine Erfahrungen, Die Antenne sieht ziemlich zerbrechlich aus. Ist sicherlich auch nicht die beste.
Leistung ist einstellbar, hab die Stromaufnahme gemessen und langsam runtergedreht bis der Strom auf ein Minimum war, dann wieder etwas hoch. So sollten 20mW anliegen. Hab bis jetzt immer noch ein paar ganz kurze Störungen drauf wobei ich noch nicht weiß ob es vom Sender Cam od. Stromversorgung kommt. Reichweite noch keine Erfahrungen, Die Antenne sieht ziemlich zerbrechlich aus. Ist sicherlich auch nicht die beste.
Bei den Tiger MN1806 bin ich aber von der Laufruhe enttäuscht. Im Gegensatz zu den MT2216 die ich auf dem TBS verbaut hab, gibts bei den 1806 schon ohne Propeller einiges an Vibrationen. Bei einen solch einen hohen Preis der Motoren hab ich mehr erwartet. Da kann man sicher von HK auch welche nehmen wo ich 4 Stück zum Preis eines 1806 bekomme.
ich hab mir auch vor ein paar Wochen so ein paar MN1806 gekönnt (auch für einen kleinen Klappquadro, Baubericht kommt bald) und kann die Aussage nicht bestätigen. Selten so laufruhige Motoren gesehen! Evtl hast du ja defekte Motoren erwischt und kriegst sie umgetauscht?
Grüße
Andreas
Selten so laufruhige Motoren gesehen! Evtl hast du ja defekte Motoren erwischt und kriegst sie umgetauscht?
Grüße
Andreas
Grüße
Andreas
Meine 1806 dagegen laufen alle 4 gleich schlecht. Mal sehen was der Händler dazu sagt.
jk
- Status
- Nicht offen für weitere Antworten.

