
Rabbit Flight Controller
- Themenstarter der-Frickler
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Woher bekommt man eigentlich die Kunststoff-Distanz- und Kunststoffschrauben?
- gibts die im Bauhaus o.ä.?
- gibts die im Bauhaus o.ä.?
Zuletzt bearbeitet:
http://www.tube-town.net/ttstore/pr...olzen-Polyamid--M3---30-mm--Innengewinde.html
oder mal shenzen googeln...^^
oder mal shenzen googeln...^^
Hallo Nitram,
wie einfach zusätzlich oben drauf?
stören sich die beiden nicht?
oder muss ich das kompass ic vom rabbit ablöten
wie einfach zusätzlich oben drauf?
stören sich die beiden nicht?
oder muss ich das kompass ic vom rabbit ablöten
mal zum Verständnis. Bei der Ansteuerung von I2C Bauteilen baut der Prozessor über den I2C Bus eine Initialisierungs-Sequenz auf, um zu prüfen, ob das Bauteil überhaupt vorhanden ist. Dazu hat jedes Bauteil (hier also Baro + Mag) eine bestimmte Adresse.
Wird nun an diese Adresse eine Nachricht gesendet und es kommt keine Antwort, dann ist das Bauteil nicht vorhanden oder defekt und die Kommunikation zu dieser Adresse wird muß eingestellt werden, sonst würde sich der Prozessor im deadlock befinden und das Programm würde sich aufhängen.
Anscheinend ist es so, dass bei Deinem Board auf der Adresse des Mag keine Antwort kommt. In diesem Fall kann man ein anderes IC mit der selben Adresse einfach parallel dazu anschließen. Es antworten dann ja nicht zwei, sondern nur das gute Bauteil.
Natürlich darf man das bei funktionierenden Bauteilen nicht tun, denn die würden dann quasi "durcheinander reden" und sich gegenseitig stören. Es sollte also niemand, der das hier liest, auf die Idee kommen, etwa aus Sicherheitsgründen ein zweites Board anzuschließen.
Zum Anschluss: Der I2C Bus besteht aus nur 2 Leitungen, die SDA und SCL genannt werden. Das sind die Pins an denen Du "irgendwelche Pulse" gesehen hast. Dazu kommen noch 2 Leitungen für die Stromversorgung also Minus (mit GND bezeichnet) und Plus (mit VCC bezeichnet). Wo Minus und Plus liegt, kannst Du mit einem Messgerät feststellen.
Welche der Leitung mit den Pulsen SDA und welche SCL ist, könnte man zwar durch Leitungsverfolgung auf der Platine feststellen, es geht aber auch anders. Du kannst diese Leitungen einfach anschließen. Wenn Du SDA auf SDA und SCL auf SCL hast, dann läuft alles. Hast Du das verwechselt, dann läuft es halt nicht, aber es geht auch nichts kaputt. Hier kann man also einfach probieren!
Nur der Vollständigkeit halber noch die Warnung, dass man bei GND und VCC nicht probieren kann sondern messen muß. Sonst ist das IC im Himmel!
Viel Erfolg und laß mal hören, ob es nach dieser Anleitung funktioniert hat. Falls nicht, dann ist das Mag gar nicht kaputt und es liegt an irgend etwas Anderem.
Falls Du die andere Methode mit dem Aus- und Einlöten des IC anwenden möchtest, sei noch gesagt, dass der Übeltäter sich neben dem Baro befindet und in Deinem Bild gut zu sehen ist (Bezeichnung L8832127).
Gruß Nitram
Zuletzt bearbeitet:
Ich habe gestern den ganzen Abend überlegt warum mein Okto beim Bremsen aus dem Vorwärtsflug (ca. 30km/h mit ein bisschen Rückenwind) plötzlich anfängt extrem zu trudeln und dann einfach runterfällt. Empfängerausfall schließe ich aus. Akku hatte nach dem Crash noch 40%. Dieses Verhalten hatt ich das letzte mal als ich den Okto gerade aufgebaut habe und die Motorlaufrichtungen nicht gestimmt haben, da wollte er aber gar nicht erst abheben. Beim Hexa hatte ich das noch nie und beim Okto seit ich die Laufrichtungen geändert habe auch nicht mehr. Wodurch kann so ein Trudelverhalten bei einem Multikopter überhaupt verursacht werden. Hat jemand eine Idee?
Hallo Andy,
vielen dank für deine ausführliche und gute erklärung
nun bin ich schlauer.
ich denke aber das ich alles so lasse wie es ist
ich finde man braucht den kompass (in dieser funktion )nicht
ich bin ja gestern ohne kompass geflogen und er fliegt super geradeaus
http://www.youtube.com/watch?v=2H4zUsv08DY
der kompass würde ja auch nur die richtung halten die der copter beim einschalten der funktion behält
ich würde mir wünschen das man vorher eine richtung bestimmen kann ( rückseite des copters zu mir zeigend)
und sobald ich dann den kompass aktiviere er wieder in dieser lage zurückdreht.
denn es passiert ja schon mal das man in der luft nicht erkennen kann wie der copter zu einem steht.
so würde mir die jetzige kompassfunktion ja nichts nützen.
aber vielleicht versuche ich trotzdem irgendwann mal das board zu reparieren
man will ja ein 100%funktionierendes board haben
noch mal vielen dank für deine hilfe
gruss
andy
Ich habe gestern den ganzen Abend überlegt warum mein Okto beim Bremsen aus dem Vorwärtsflug (ca. 30km/h mit ein bisschen Rückenwind) plötzlich anfängt extrem zu trudeln und dann einfach runterfällt. Empfängerausfall schließe ich aus. Akku hatte nach dem Crash noch 40%. Dieses Verhalten hatt ich das letzte mal als ich den Okto gerade aufgebaut habe und die Motorlaufrichtungen nicht gestimmt haben, da wollte er aber gar nicht erst abheben. Beim Hexa hatte ich das noch nie und beim Okto seit ich die Laufrichtungen geändert habe auch nicht mehr. Wodurch kann so ein Trudelverhalten bei einem Multikopter überhaupt verursacht werden. Hat jemand eine Idee?
ich gehe mal davon aus, dass Dein Copter ordentlich aufgebaut ist und Propeller keine starke Unwucht haben.
Dann fallen mir als weitere Punkte folgendes ein:
1. Der Regler hat eine zu hohe Verstärkung und ist beim Abbremsen überkritisch geworden. Insbesondere der P-Wert wäre dann zu verringern, oder einfach im GUI die nächst kleinere Coptergröße wählen.
2. Der Copter hat recht viel Gewicht für den Antrieb (z. B. Motoren, Propellergröße nicht optimal).
Im Gegensatz zu einem Heli, der die Flugmanöver durch Blattverstellung vornimmt, braucht der Regler eines Copters immer eine gewisse Sicherheitsreserve beim Gas. Diese muß um so größer sein, je rasanter die Flugmanover sind, die geflogen werden sollen.
Ein Beispiel dazu:
Ein Copter hat so viel Gewicht, dass 75% Gas zum Schweben erforderlich sind. Wird dieser Copter nun plötzlich abgebremst, dann muss der Copter ja gegen seine Flugrichtung gewinkelt werden und die Motoren müssen zum bremsen schneller laufen. Wird das Bremsmanöver so stark eingeleitet, dass mehr als 25% zusätzliches Gas erforderlich werden, dann reicht die Leistungsreserve nicht aus und der Regler im Copter wird schlagartig instabil.
Meiner Ansicht nach ist das eines der größten Nachteile eines Copters. Meinen kleinen, leichten Heli (Trex450) habe ich schon mit über 1KG Zusatzlast geflogen. Die Rotorblätter haben nur so gerattert und er flog auch nicht mehr schön, aber ein Regler kann da nicht instabil werden, wo keiner ist (außer der Regler, der sich zwischen den Augen befindet).
Gruß Nitram
Zuletzt bearbeitet:
....der kompass würde ja auch nur die richtung halten die der copter beim einschalten der funktion behält
ich würde mir wünschen das man vorher eine richtung bestimmen kann .....
ich würde mir wünschen das man vorher eine richtung bestimmen kann .....
ich glaube, es ist nicht zwingend die Richtung, die der Copter beim Einschalten hatte. Das ist nur dann so, wenn man Head Lock immer eingeschaltet hat. Wenn Du das auf einen Schalter legst, dann müßte er die Position halten, die im Moment des Einschaltens vorhanden war.
Du kannst also die Richtung im Flug einfach umprogrammieren mit Head Lock AUS, Copter in die gewünschte Position drehen und Head Lock EIN.
Auch für den Fall, dass man in größerer Entfernung total die Orientierung verloren hat, halte ich die Funktion für sinnvoll. Damit läßt sich immerhin sicherstellen, das der Copter sich nicht dreht. In welche Richtung er dann zeigt, kann man mit den Steuerknüppeln ja leicht herausfinden.
Dein Video gefällt mir übigens sehr gut. Ich vermute das war mit der CamOne.
Gruß Nitram
Hallo Andy,
ich glaube, es ist nicht zwingend die Richtung, die der Copter beim Einschalten hatte. Das ist nur dann so, wenn man Head Lock immer eingeschaltet hat. Wenn Du das auf einen Schalter legst, dann müßte er die Position halten, die im Moment des Einschaltens vorhanden war.
Du kannst also die Richtung im Flug einfach umprogrammieren mit Head Lock AUS, Copter in die gewünschte Position drehen und Head Lock EIN.
Auch für den Fall, dass man in größerer Entfernung total die Orientierung verloren hat, halte ich die Funktion für sinnvoll. Damit läßt sich immerhin sicherstellen, das der Copter sich nicht dreht. In welche Richtung er dann zeigt, kann man mit den Steuerknüppeln ja leicht herausfinden.
Dein Video gefällt mir übigens sehr gut. Ich vermute das war mit der CamOne.
Gruß Nitram
ich glaube, es ist nicht zwingend die Richtung, die der Copter beim Einschalten hatte. Das ist nur dann so, wenn man Head Lock immer eingeschaltet hat. Wenn Du das auf einen Schalter legst, dann müßte er die Position halten, die im Moment des Einschaltens vorhanden war.
Du kannst also die Richtung im Flug einfach umprogrammieren mit Head Lock AUS, Copter in die gewünschte Position drehen und Head Lock EIN.
Auch für den Fall, dass man in größerer Entfernung total die Orientierung verloren hat, halte ich die Funktion für sinnvoll. Damit läßt sich immerhin sicherstellen, das der Copter sich nicht dreht. In welche Richtung er dann zeigt, kann man mit den Steuerknüppeln ja leicht herausfinden.
Dein Video gefällt mir übigens sehr gut. Ich vermute das war mit der CamOne.
Gruß Nitram
Hallo Nitram,
ja das meinte ich mit einschalten
er hält die position die der copter in dem moment des einschalten der funktion hat
aber der copter hält so gut die richtung auch ohne kompass
so das man darauf ruhig verzichten kann
ja die onboard aufnahmen sind mit der camone gemacht
noch ne frage
an welchen reglern muss ich drehen damit der copter auch beim abstieg aus großen höhen ruhiger bleibt?
gruss
andy
Meiner schwebt bei ca. 50% und da er sich bei 100% noch gut steuern lässt gehen ich davon aus, dass Vollgas ≠ 100% ist.
Es war keine direkt Vollbremsung in der Luft, eher eine normale Gier/Roll Linkskurve die ich, zum Geschwindigkeit abbauen, machen wollte. Also eigentlich so wie ich es immer mache.
Meinst du damit einen vertikalen, geraden Sinkflug?
Edit: Ich habe AUX Stability und AUX Balance etwas hochgedreht. Geht sauber runter und wackelt kaum.
Es war keine direkt Vollbremsung in der Luft, eher eine normale Gier/Roll Linkskurve die ich, zum Geschwindigkeit abbauen, machen wollte. Also eigentlich so wie ich es immer mache.
an welchen reglern muss ich drehen damit der copter auch beim abstieg aus großen höhen ruhiger bleibt?
Edit: Ich habe AUX Stability und AUX Balance etwas hochgedreht. Geht sauber runter und wackelt kaum.
Zuletzt bearbeitet:
Hallo Jockey,
vielen dank ich werde das mal ausprobieren.
ich habe eben die aktuelle software auf meinen butterfly aufgespielt
autolanding scheint tatsächlich besser zu funktionieren
der copter landete sanft und schaltete sich selber ab
ABER die höhe halten funktion spinnt nun. mit der alten software hielt er ja gut die höhe
aber nun macht er sprünge von mehreren metern und fällt wieder unsanft bis auf den boden.
hat das noch jemand von euch mit der neuen firmware?
gruss
andy
vielen dank ich werde das mal ausprobieren.
ich habe eben die aktuelle software auf meinen butterfly aufgespielt
autolanding scheint tatsächlich besser zu funktionieren
der copter landete sanft und schaltete sich selber ab
ABER die höhe halten funktion spinnt nun. mit der alten software hielt er ja gut die höhe
aber nun macht er sprünge von mehreren metern und fällt wieder unsanft bis auf den boden.
hat das noch jemand von euch mit der neuen firmware?
gruss
andy
Das Problem mit den Höhensprüngen habe ich auch. Zwar nicht ständig aber immer wieder genau da wo ich gerne darauf verzichten würde...
Edit: Die ganz krassen Sprünge habe ich nur im Barobereich. Im US-Bereich schwank er immer zwischen 50cm und 1,5m. Aber das schon von anfang an. Mit dem Hexa hielt sich das noch in Grenzen aber mit dem Okto ist es extrem
Edit: Die ganz krassen Sprünge habe ich nur im Barobereich. Im US-Bereich schwank er immer zwischen 50cm und 1,5m. Aber das schon von anfang an. Mit dem Hexa hielt sich das noch in Grenzen aber mit dem Okto ist es extrem
Zuletzt bearbeitet:
Hallo Nitram,
noch ne frage
an welchen reglern muss ich drehen damit der copter auch beim abstieg aus großen höhen ruhiger bleibt?
noch ne frage
an welchen reglern muss ich drehen damit der copter auch beim abstieg aus großen höhen ruhiger bleibt?
ich denke Du solltest mal schauen, ob eine Erhöhung der P-Komponente oder/und D-Komponente eine Besserung bringt. Das senkrechte Absteigen ist allerdings bei allen Senkrechtstarten etwas problematisch. Hier sind selbst schon Kampfmaschinen des Militärs abgestürzt, weil sie zu schnell absteigen wollten.
Zur Reglereinstellung eines PID Reglers ist grundsätzlich zu sagen, dass eine höhere Verstärkung der Regelabweichung der P-Strecke (also Schieber nach rechts) ein schnelleres und meist besseres Regelverhalten bringt. Das geht so lange gut, bis die Regelstrecke (in diesem Fall das Ansprechverhalten Deines Copters) zu langsam wird für den Regler. Danach kommt der P-Regler in einen überkritischen Bereich und beginnt zu schwingen. Das sieht man in einem "wobbeln" oder zittern des Copters, welches bei geringer Überschreitung nur sehr leicht aussehen kann. Es kann sich bei größerer Überschreitung aber auch schlagartig so aufschaukeln, dass man nicht mehr viel machen kann.
Das ist eine tückische Eigenschaft, denn unmittelbar vor diesem kritischen Punkt hat der P-Regler das beste Regelverhalten überhaupt und man rechnet angesichts der sehr guten Flugeigenschaften nicht mit Schwierigkeiten.
Die Erhöhung der D Komponente bewirkt, dass der Regler schneller seinen Sollwert erreicht und dämpft damit die Schwingungsneigung des P-Reglers. Wenn der D-Wert zu hoch ist, bewirkt es aber, dass der Regler über seinen Sollwert hinausschießt und heizt damit die Schwingung noch an. Damit hat man dann genau das Gegenteil von dem erreicht, was man wollte.
Die I Komponente wird verwendet, weil ein realer P-Regler niemals zu 100% ausregeln kann. Es bleibt immer eine Abweichung vom Sollwert. Diese Abweichung ist um so geringer, je höher die Verstärkung der Regelabweichung ist. Wie vorgenannt kann man aber in der Praxis die Verstärkung nicht beliebig steigern, ohne ein Schwingen zu riskieren. Deshalb bleibt auch immer eine Regelabweichung beim P-Regler.
Der I-Regler korrigiert deshalb diese verbleibende Regelabweichung langsam, so dass nach einer gewissen Zeit die Abweichung zu 0 wird.
Soweit der PID Regler in Kurzfassung.
Ich würde Dir empfehlen die Werte vorsichtig immer weiter zu erhöhen. Du kannst Dich da z. B. an der Einstellung für den nächstgrößeren Copter orientieren. Die Entwickler haben ja die Einstellungen für alle Copter (gut aufgebaute und weniger gute) gewählt. Wenn Deiner gut aufgebaut ist, wenn die Motoren und Propeller optimiert sind und auch die Motor-Regler schnell sind, dann hast Du sicherlich noch viel Reserve nach oben.
Solltest Du dann aber schon im Schwebeflug ein leichtes Zittern sehen, dann sei vorsichtig und gehe wieder etwas zurück, auch dann, wenn Du noch der Ansicht bist, das Dich das nicht weiter stört. Du könntest ggf. recht schnell zu einer anderen Ansicht kommen.
Gruß Nitram
Könntest du mir bitte einen Gefallen tun und diese PID-Geschichte, zum besseren Verständnis, mit ein paar Zahlen versehen?
Trotz intensivem schlaulesen, blicke ich da immernoch nicht durch.
Edit:
STOPP! Ich habe die Regler verdreht, bzw. den Falschen Screenshot aufgemacht.
Es waren StabilityLevel & AUX Balance.
Edit2:
Nach erneutem intensivem Studium der PID-Kurzfassung, komme ich zum Ergebnis das mein trudel/wobbel/zitter Crash auf einen zu niedrigen D-Wert zurückzuführen ist. Könnte ich damit richtig liegen? Siehe Screenshot (Screenauflösung 3840x1080).
Edit3:
Habe Dyna Stability um 10% auf 40% angehoben. Vielleicht bringt es ja etwas. Getestet wird morgen.
Trotz intensivem schlaulesen, blicke ich da immernoch nicht durch.
Edit:
Hallo Jockey,
vielen dank ich werde das mal ausprobieren.
vielen dank ich werde das mal ausprobieren.
Es waren StabilityLevel & AUX Balance.
Edit2:
Nach erneutem intensivem Studium der PID-Kurzfassung, komme ich zum Ergebnis das mein trudel/wobbel/zitter Crash auf einen zu niedrigen D-Wert zurückzuführen ist. Könnte ich damit richtig liegen? Siehe Screenshot (Screenauflösung 3840x1080).
Edit3:
Habe Dyna Stability um 10% auf 40% angehoben. Vielleicht bringt es ja etwas. Getestet wird morgen.
Anhänge
-
 422,1 KB Aufrufe: 22
422,1 KB Aufrufe: 22
Zuletzt bearbeitet:
....autolanding scheint tatsächlich besser zu funktionieren
der copter landete sanft und schaltete sich selber ab
der copter landete sanft und schaltete sich selber ab
ABER die höhe halten funktion spinnt nun. mit der alten software hielt er ja gut die höhe
aber nun macht er sprünge von mehreren metern und fällt wieder unsanft bis auf den boden.
hat das noch jemand von euch mit der neuen firmware?
aber nun macht er sprünge von mehreren metern und fällt wieder unsanft bis auf den boden.
hat das noch jemand von euch mit der neuen firmware?
there is a bug in 1.208 and 1.209 in altitude hold mode............ if you have no baro (or you have not checked the baro in GUI), then the altitude hold will not work even if you have enable the sonar...
Vielleicht hat dein Baro-MAG Sensor Board doch einen Schaden?
- was zeigt den der Baro auf dem Tisch für Werte?
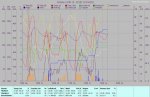
Weiterhin gab es Mi/Do/Fr starke Luftdruckveränderungen (weiße Linie), vielleicht auch ein Grund?
Zuletzt bearbeitet:
Könntest du mir bitte einen Gefallen tun und diese PID-Geschichte, zum besseren Verständnis, mit ein paar Zahlen versehen?
Trotz intensivem schlaulesen, blicke ich da immernoch nicht durch.
Trotz intensivem schlaulesen, blicke ich da immernoch nicht durch.
was meinst Du damit genau?
Möchtest Du die Formeln zur mathematischen Beschreibung eines PID Reglers oder möchtest Du weitergehende Erläuterungen zur Funktionsweise eines PID Reglers anhand von Beispielen?
Gruß Nitram
- Status
- Nicht offen für weitere Antworten.

