Mehr als max ca kannst du nicht Auftrieb haben. Wenn du das Profil (max ca) festgelegt hast, den Geschwindigkeitsbereich (Hang-/Thermikschleicher, Hotliner, ...) und die Tragflächengröße kennst, kannst du dir (etwas vereinfacht) den Maximalauftrieb über:
A = 0,6 × ca × v² × F
berechnen. Maximalauftrieb durch Eigenmasse des Seglers dividiert ergibt dein maximales Lastvielfache. Zwar sind eigentlich alle Parameter beim Entwurf noch unbekannt, aber andererseits weißt du ja, welchen Flugzeugtyp du bauen willst, dementsprechend sind die Größenordnungen der Einzelwerte abschätzbar.
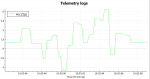
PS: Dennoch interessiert mich jetzt die Messung der Beschleunigungen am Modell...
![IMG_0771[1].JPG](/data/attachments/129/129976-ae319a0ec9c6435fd75b1ae45c801f0d.jpg)


 Der Sensor selbst könnte bis 16g. Was in iNav geht, weiß ich auch (noch) nicht.
Der Sensor selbst könnte bis 16g. Was in iNav geht, weiß ich auch (noch) nicht.