
GPS Rescue Problem
- Themenstarter Dr Evil
- Beginndatum
Jetzt, da mein GPS wieder funktioniert, habe ich auch mal GPS Rescue getestet. Und mich dann auch über das Nicken gewundert.
Aber laut dieser Beschreibung scheint das tatsächlich normal zu sein:

Bei mir ist das eher Gangnam Style. Das Nicken ist für meinen Geschmack etwas zu extrem. Mit welchem Parameter kann man das reduzieren?
das Nicken ist normal, steht auch irgendwo im Betaflight Wiki meine ich.
Bei mir ist das eher Gangnam Style. Das Nicken ist für meinen Geschmack etwas zu extrem. Mit welchem Parameter kann man das reduzieren?



")
Jetzt funktioniert GPS Rescue so einigermaßen. Ist immer noch etwas unruig beim Zurückfliegen. Aber "Steigen" und "Drehen" funktioniert mit den Default-Parameteren. Ich musste also lediglich die Geschwindigkeits-PIDs anpassen. Ich war irritiert, warum es bezüglich den Default-Werten so unterschiedliche Angaben gibt. Jedenfalls sind das jetzt meine Parameter:

Ich musste noch diesen Wert anpassen, denn mein Copter hovert bei ca. 40% Gas-Stellung:

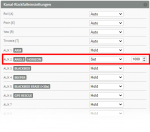
Und dann muss man den Copter noch in den Angle-Mode zwingen, damit er senkrecht steigt, falls man beim Aktivieren von GPS Rescue nicht gelevelt ist (z. B. eine Kurve fliegt):
Ich musste noch diesen Wert anpassen, denn mein Copter hovert bei ca. 40% Gas-Stellung:
Und dann muss man den Copter noch in den Angle-Mode zwingen, damit er senkrecht steigt, falls man beim Aktivieren von GPS Rescue nicht gelevelt ist (z. B. eine Kurve fliegt):

Das ist gut zu wissen, ich kann aber jedem eh empfehlen für Failsafe 1 ein paar Sekunden bei gleichem Throttle in den Angle Mode zu gehen, so verhindert man schnell mal den ein ider anderen Failsafe (neulich z.B. als ich zu nah an nen Funkturm ran kam). Wenn das für GPS Rescue auch noch hilft, win win win
Ich habe für Stage 1 auch throttle nahe oder etwas über Hover, Angle aktiv und ein bisschen Yaw damit das Quad sich dabei leicht dreht...
Meine Theorie: falls der Failsave zustande kam weil die Antenne gerade ungünstig zum Sender liegt kann ein wenig Yaw, also Drehung des Copters, vielleicht schon helfen. Insbesondere wenn man, wie ich, gerne die Immortal-T horizontal am Quad anbringt. Durch Yaw im Stage 1 des Failsaves kann die Antennen-Null dadurch weggedreht werden und der Empfang wird wieder drastisch besser.
Meine Theorie: falls der Failsave zustande kam weil die Antenne gerade ungünstig zum Sender liegt kann ein wenig Yaw, also Drehung des Copters, vielleicht schon helfen. Insbesondere wenn man, wie ich, gerne die Immortal-T horizontal am Quad anbringt. Durch Yaw im Stage 1 des Failsaves kann die Antennen-Null dadurch weggedreht werden und der Empfang wird wieder drastisch besser.
Oh, das mit dem Yaw ist ne geile Idee.... Ich hab aber absichtlich den Throttle einfach auf Hold, da kann ich die settings von Quad zu quad kopieren und es reicht im Angle eigentlich immer fürs aufsteigen...
Wichtig ist auch, dass man die Failsafe 1 Zeit deutlich hoch stellt, bei mir aktuell steht sie auf 5 Sekunden
Wichtig ist auch, dass man die Failsafe 1 Zeit deutlich hoch stellt, bei mir aktuell steht sie auf 5 Sekunden

