
Erster WiiCopter - Zusammenstellung Review - NanoWii
- Themenstarter droid
- Beginndatum
... goldwert der faden hier, genau nach meinem geschmack, danke an droid und die community 
ich habe mittlerweile 1.30h auf dem MWquad und bin hellauf begeistert.
einzig die 25A regler, die können definitv keine 4S und schon gar nicht wenn man über 10/12A zieht, sonst hätte ich schon viel mehr flugstunden drauf, so einen spass macht das teil. so habe ich nur einen alten ollen 3S 5000 mAh aber neue 3S sind schon geordert.
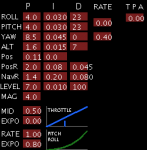
power hat der kollege ohne ende. jetzt bin ich bisi am tweaken, mittlerweile sieht es so aus ... nick roll kommen schon dem einigermassen entgegen was ich von MK und Naza gewohnt bin, gier ist mir noch zu lahm.
ich habe mittlerweile 1.30h auf dem MWquad und bin hellauf begeistert.
einzig die 25A regler, die können definitv keine 4S und schon gar nicht wenn man über 10/12A zieht, sonst hätte ich schon viel mehr flugstunden drauf, so einen spass macht das teil. so habe ich nur einen alten ollen 3S 5000 mAh aber neue 3S sind schon geordert.
power hat der kollege ohne ende. jetzt bin ich bisi am tweaken, mittlerweile sieht es so aus ... nick roll kommen schon dem einigermassen entgegen was ich von MK und Naza gewohnt bin, gier ist mir noch zu lahm.
Anhänge
-
 9,4 KB Aufrufe: 125
9,4 KB Aufrufe: 125
So mein erster Flugversuch ist vorbei. Gestern Abend habe ich es im Schatten der Dunkelheit gewagt und bin positiv überrascht. Das ganze Setup fliegt sich schon mal sehr fein. Leider dreht sich der Copter noch ziemlich um die Yaw Achse. Habe versucht auf der DX8 zu trimmen, was ich aber ziemlich schnell aufgegeben habe da sich kaum etwas gebessert hat. Nun werde ich mich heute mal der PID Werte annehmen.
Eine Frage habe ich gleich zu Beginn. Ist es ratsam die 4 Kanäle an der Funke so zu trimmen, dass ich in der Multiwii Conf in der Mittenstellung etwa auf 1500 lande? Oder einfach nach Gefühl im Flug trimmen? Wie geht ihr da vor? (bis jetzt alles ohne ACC)
Gestern Abend habe ich es im Schatten der Dunkelheit gewagt und bin positiv überrascht. Das ganze Setup fliegt sich schon mal sehr fein. Leider dreht sich der Copter noch ziemlich um die Yaw Achse. Habe versucht auf der DX8 zu trimmen, was ich aber ziemlich schnell aufgegeben habe da sich kaum etwas gebessert hat. Nun werde ich mich heute mal der PID Werte annehmen. Eine Frage habe ich gleich zu Beginn. Ist es ratsam die 4 Kanäle an der Funke so zu trimmen, dass ich in der Multiwii Conf in der Mittenstellung etwa auf 1500 lande? Oder einfach nach Gefühl im Flug trimmen? Wie geht ihr da vor? (bis jetzt alles ohne ACC)
So ich melde mich zurück nach einem weiteren Flugversuch. Leider habe ich nun ein bisschen das Vertrauen verloren. Bin relativ flott mit Nick nach vorne geflogen und wollte den Copter mit einem scharfen nicken in die Gegenrichtung abfangen. In dem Moment ist mir der Copter einfach links weggekippt und in pirouetten nach unten gefallen. (zum Glück in eine hohe Wiese) Nun ist mir nicht ganz klar an was das ganze liegt. Könnt ihr mir einen Tipp geben? Die PID Werte habe ich alle noch auf Standard.
Bin relativ flott mit Nick nach vorne geflogen und wollte den Copter mit einem scharfen nicken in die Gegenrichtung abfangen. In dem Moment ist mir der Copter einfach links weggekippt und in pirouetten nach unten gefallen. (zum Glück in eine hohe Wiese) Nun ist mir nicht ganz klar an was das ganze liegt. Könnt ihr mir einen Tipp geben? Die PID Werte habe ich alle noch auf Standard.Also die Motoren sind richtig angesteckt und das Nano sitzt denke ich auch richtig. (der Pfeil zeigt nach vorne) Props sind auch richtig drauf und die Motoren drehen auch korrekt. Habe es extra noch mal gecheckt. Wenn ich im Garten umher schwebe passt es auch. Anbei findest du auch noch mal einen Screen der aktuellen Settings.

Bin danach langsamer über Nick nach vorne geflogen und habe dann sanft in die Gegenrichtung "gebremst" und konnte dann auch kein falsches Verhalten feststellen. Habe mich halt nicht mehr getraut mit Schwung abzubremsen. Ich schließe also richtig aus deiner Antwort das es eigentlich nicht passieren sollte. Korrekt? Bisher nutze ich nur den reinen Acro Mode also keinen ACC.
Bin danach langsamer über Nick nach vorne geflogen und habe dann sanft in die Gegenrichtung "gebremst" und konnte dann auch kein falsches Verhalten feststellen. Habe mich halt nicht mehr getraut mit Schwung abzubremsen. Ich schließe also richtig aus deiner Antwort das es eigentlich nicht passieren sollte. Korrekt? Bisher nutze ich nur den reinen Acro Mode also keinen ACC.
hallo droid
erst mal gratulation zum maiden und gut, dass beim 2. flug nichts passiert ist!
ich habe mich die letzten 2 tage intensiv mit PID werten beim MWC beschäftigt.
fazit vorab: die standardwerte sollten für eine ziemlich weite range an konfigurationen passen.
ich kann nur von meiner aktuellen erfahrung sprechen.
- im arduino sketch sollten eigentlich nur 4 werte eine anpassung zwingend benötigen
(quadx - nanowii - minthrottel - art der funke)
- im multiwiiconf sollten die ausschläge rechts sich genauso bewegn wie der copter wenn man ihn in der hand hält.
- motor drehrichtung, proppeler drehrichtung, gaswege alles noch mal checken
- ACC wie folgt kalibrieren:
leere bierkiste nehmen, auf den die 4 ausleger plan aufliegen können.
ebene fläche suchen, am besten gefliest z.b. im bad.
kiste aufstellen und wasserwaage drauf in allen achsen und bei jeder messung auch die waage mal um 180° drehen und nachmessen. die kiste so ausleveln mix z.b. bierdeckeln, dass sie im wasser steht.
vorausgesetzt dein kopter ist einigermassen ordentlich aufgbaut, das teil draufstellen und den ACC im Tool kalibrieren.
- erst die funke an, dann den lipo an den kopter
- kopter einigermassen waagerecht auf den boden stellen und gyros mit stick kalibrieren
- kopter in die hand nehmen und motoren starten.
gegebenenfalls muss man hier am minthrottel noch was nachlegen dass alle anlaufen und gut rund sind.
ich haben die simonK firmware auf den 25A ESCs von flyduino. im sketch steht 1064 minthrottel, aber mit den motoren von chinaman brauche ich 1150 damit die rund laufen bei 3S im standgas.
- jetzt in der hand ganz wenig gas geben und das gas stehen lassen. wirklich nur ein wenig gas, damit die regelung nicht abschaltet. bei meinem quad reicht wirklich ein mini tick und schon merkt man, wenn man den MWC neigt wie die regelung die motoren gegenarbeiten lässt. jetzt kann man langsam und vorsichtig nick roll yaw alles wunderbar in der hand testen
- wenn das alles funktionier raus auf die wiese ... im ACC! wieder in der hand starten, noch mal alles testen und am ende gaaaaaaaaanz langsam gas geben bis man die hand öffnen kann und ihn mit einem leichten schubs vorwärts schweben lässt.
- das ganze natürlich bei noWind. als nächstes den ACC feintunen. nur naseschweben im ACC in alle 4 himmelsrichtungen und schauen wohin er zieht. landen und mit den sticks ACC feintunen. das spiel 2-4 mal wiederholen und schon steht er wie eine 1.
- als nächste mal im ACC testen wie er sich so im sehr gemachen rundflug verhält. dann das tempo ein wenig steigern und schauen, ob die sticks so reagieren wie man es gewohnt ist/ oder eben seinem stil entspricht.
- PID werte habe ich noch gar nicht angefasst, nur RC EXPO und RC RATE, und jetzt auch langsam nick/roll RATE und yaw RATE. die standard PID werte passen mir schon ganz gut.
so habe ich die letzten tage meine maiden und einstellen hinter mich gebracht. ich denke mal alles zwischen 380 und 550 quadx mit nanowii (vorausgesetzt aufbau und verhältnis prop/mot/ESC passen) sollte auf anhieb gut fliegbar sein. PID werte sind mit sicherheit sehr weit hinten anzusiedeln wenn es um das debugging der fulgeigenschaften geht.
wenn du schreibst, dass er giert von selbst ...
ich würde Tilmans liste erst mal der reihe nach abarbeiten:
Quad driftet stark weg oder dreht sich von selbst
gruss,
der skyfreak
erst mal gratulation zum maiden und gut, dass beim 2. flug nichts passiert ist!
ich habe mich die letzten 2 tage intensiv mit PID werten beim MWC beschäftigt.
fazit vorab: die standardwerte sollten für eine ziemlich weite range an konfigurationen passen.
ich kann nur von meiner aktuellen erfahrung sprechen.
- im arduino sketch sollten eigentlich nur 4 werte eine anpassung zwingend benötigen
(quadx - nanowii - minthrottel - art der funke)
- im multiwiiconf sollten die ausschläge rechts sich genauso bewegn wie der copter wenn man ihn in der hand hält.
- motor drehrichtung, proppeler drehrichtung, gaswege alles noch mal checken
- ACC wie folgt kalibrieren:
leere bierkiste nehmen, auf den die 4 ausleger plan aufliegen können.
ebene fläche suchen, am besten gefliest z.b. im bad.
kiste aufstellen und wasserwaage drauf in allen achsen und bei jeder messung auch die waage mal um 180° drehen und nachmessen. die kiste so ausleveln mix z.b. bierdeckeln, dass sie im wasser steht.
vorausgesetzt dein kopter ist einigermassen ordentlich aufgbaut, das teil draufstellen und den ACC im Tool kalibrieren.
- erst die funke an, dann den lipo an den kopter
- kopter einigermassen waagerecht auf den boden stellen und gyros mit stick kalibrieren
- kopter in die hand nehmen und motoren starten.
gegebenenfalls muss man hier am minthrottel noch was nachlegen dass alle anlaufen und gut rund sind.
ich haben die simonK firmware auf den 25A ESCs von flyduino. im sketch steht 1064 minthrottel, aber mit den motoren von chinaman brauche ich 1150 damit die rund laufen bei 3S im standgas.
- jetzt in der hand ganz wenig gas geben und das gas stehen lassen. wirklich nur ein wenig gas, damit die regelung nicht abschaltet. bei meinem quad reicht wirklich ein mini tick und schon merkt man, wenn man den MWC neigt wie die regelung die motoren gegenarbeiten lässt. jetzt kann man langsam und vorsichtig nick roll yaw alles wunderbar in der hand testen
- wenn das alles funktionier raus auf die wiese ... im ACC!
wieder in der hand starten, noch mal alles testen und am ende gaaaaaaaaanz langsam gas geben bis man die hand öffnen kann und ihn mit einem leichten schubs vorwärts schweben lässt.- das ganze natürlich bei noWind. als nächstes den ACC feintunen. nur naseschweben im ACC in alle 4 himmelsrichtungen und schauen wohin er zieht. landen und mit den sticks ACC feintunen. das spiel 2-4 mal wiederholen und schon steht er wie eine 1.
- als nächste mal im ACC testen wie er sich so im sehr gemachen rundflug verhält. dann das tempo ein wenig steigern und schauen, ob die sticks so reagieren wie man es gewohnt ist/ oder eben seinem stil entspricht.
- PID werte habe ich noch gar nicht angefasst, nur RC EXPO und RC RATE, und jetzt auch langsam nick/roll RATE und yaw RATE. die standard PID werte passen mir schon ganz gut.
so habe ich die letzten tage meine maiden und einstellen hinter mich gebracht. ich denke mal alles zwischen 380 und 550 quadx mit nanowii (vorausgesetzt aufbau und verhältnis prop/mot/ESC passen) sollte auf anhieb gut fliegbar sein. PID werte sind mit sicherheit sehr weit hinten anzusiedeln wenn es um das debugging der fulgeigenschaften geht.
wenn du schreibst, dass er giert von selbst ...
ich würde Tilmans liste erst mal der reihe nach abarbeiten:
Quad driftet stark weg oder dreht sich von selbst
- Im Acro-Mode: Nicht getrimmt
- Im Level-Mode: Nicht getrimmt, ACC nicht ordentlich kalibriert
- Ausleger krumm/Motoren nicht senkrecht parallel zueinander montiert
- Mittensignale liegen weit von 1500 entfernt (in der GUI kontrollieren)
- Propeller defekt oder verschiedene Propeller
- Gasweg bei den Reglern nicht angelernt
gruss,
der skyfreak
Vielen Dank für die ausführlichen Antworten. Hier sind einige Bilder vom Copter.




Was mir noch eingefallen ist. Kann es sein das der Akku aus der Halterung gerutscht ist und dadurch der Sturz zu Stande kam? Ich dachte im ersten Moment der Akku ist wegen dem Sturz aus der Halterung (Klettband) gerutscht, aber es könnte auch anders herum gewesen sein. (war zu weit weg um es wirklich beurteilen zu können) Das kalibrieren des Gyro muss man es wirklich von Hand machen (also über die Funke) oder wird der Copter nicht direkt nach dem booten der MultiWii kalibriert. (ich meine das irgendwo gelesen zu haben)
Achja und Strom bekommt der Copter über einen BEC eines ESC. Alle anderen ESCs haben nur Signal angeschlossen und sonst nichts. (aus der Stiftleiste habe ich, wie weiter vorne im Thread vorgeschlagen die Stifte entfernt)
Was mir noch eingefallen ist. Kann es sein das der Akku aus der Halterung gerutscht ist und dadurch der Sturz zu Stande kam? Ich dachte im ersten Moment der Akku ist wegen dem Sturz aus der Halterung (Klettband) gerutscht, aber es könnte auch anders herum gewesen sein. (war zu weit weg um es wirklich beurteilen zu können) Das kalibrieren des Gyro muss man es wirklich von Hand machen (also über die Funke) oder wird der Copter nicht direkt nach dem booten der MultiWii kalibriert. (ich meine das irgendwo gelesen zu haben)
Achja und Strom bekommt der Copter über einen BEC eines ESC. Alle anderen ESCs haben nur Signal angeschlossen und sonst nichts. (aus der Stiftleiste habe ich, wie weiter vorne im Thread vorgeschlagen die Stifte entfernt)
keine ahnung ob man die gyros mehrfach und immer wieder kalibrieren muss. bei meinem MK ist das so, ohne dem starten die motoren gar nicht. beim DJI geht es überhaupt nicht und beim MWC .... nun es ist ein frage von einer sekunde und ich mache es jedes mal wenn ich das nano mit strom versorge, ist eh schon so drin beim preflight check durch den MK.
den lipo nur mit einem klettband aussenrum sichern ... hmhmh ... ich habe immer noch einen flauschi am lipo und klett am rahmen. so wird der lipo bei schnellen flügen auch besser gegen verdrehen gesichert, wiegt nichts, und aussen drum noch ein klettband stramm für den halt.
den lipo nur mit einem klettband aussenrum sichern ... hmhmh ... ich habe immer noch einen flauschi am lipo und klett am rahmen. so wird der lipo bei schnellen flügen auch besser gegen verdrehen gesichert, wiegt nichts, und aussen drum noch ein klettband stramm für den halt.
btw, wenn ich mir deinen quad so anschaue nice nice, und nicht dass es irgendwas mit deinem problem zu tun hat, ist mir nur eben aufgefallen beim betrachten der bilder ... öhmmm summer?
... "aba isch abe dok gar keine summer!"
ist ein summer pflicht, habe ich was verpasst, ist mir was entgangen?
da ich eh keine lipowarnung schalten kann, lipo hängt über ESC/BEC dran (ich habe übrigens einfach von 3 ESCs auf anraten von flyduino paul den servopin des +pol gezogen und schlumpf drüber, also 3x S/GND 1x S/+/GND am nano), benötige ich da einen summer?
gruss,
der skyfreak
tante edith meint noch:
heute kamen die 3000.er 3S und auch das infrarotthermometer.
also feldtest mit NTM prop 1200KV - gemfan AP CF 8x,45" - flyduino 25A ESCs simonK - und ein junsi power logger dran um strom und leistung zu messen. vor den messungen habe ich auch immer mal 2-3 sekunden vollgas gegeben.
3S - ESCs werden auch nach 10 minuten rumheizen nur 43-47°C warm
4S - nach 3 minuten normalem bis flotten rundflug und 1x vollgas steigen 1. testmessung, oops 78-84°C
ergo die flyduino 25A ESCs simonK können definitiv keine 4S ab nicht bei 13A max. und 160W zumindest.
aber auch mit den 3S 3000 mAh wiegt der quad 841 gr. und geht ab wie die luzie
MWC ist grandios wenn es um spass geht, der DJI wird wohl sein ende als FPV esel finden.
... "aba isch abe dok gar keine summer!"
ist ein summer pflicht, habe ich was verpasst, ist mir was entgangen?
da ich eh keine lipowarnung schalten kann, lipo hängt über ESC/BEC dran (ich habe übrigens einfach von 3 ESCs auf anraten von flyduino paul den servopin des +pol gezogen und schlumpf drüber, also 3x S/GND 1x S/+/GND am nano), benötige ich da einen summer?
gruss,
der skyfreak
tante edith meint noch:
heute kamen die 3000.er 3S und auch das infrarotthermometer.
also feldtest mit NTM prop 1200KV - gemfan AP CF 8x,45" - flyduino 25A ESCs simonK - und ein junsi power logger dran um strom und leistung zu messen. vor den messungen habe ich auch immer mal 2-3 sekunden vollgas gegeben.
3S - ESCs werden auch nach 10 minuten rumheizen nur 43-47°C warm
4S - nach 3 minuten normalem bis flotten rundflug und 1x vollgas steigen 1. testmessung, oops 78-84°C
ergo die flyduino 25A ESCs simonK können definitiv keine 4S ab nicht bei 13A max. und 160W zumindest.
aber auch mit den 3S 3000 mAh wiegt der quad 841 gr. und geht ab wie die luzie
MWC ist grandios wenn es um spass geht, der DJI wird wohl sein ende als FPV esel finden.
Ich habe einen Lipo Warner von Stefans Lipo Shop verbaut. Bei diesem war auch der Summer dabei. Im Moment suche ich aber immer noch nach einer Lösung für das Yaw Problem. Bin gerade eben nochmal bei Windstille geflogen und konnte folgendes beobachten. Der Copter yawt sofort nach links wenn ich Gas gebe. Gerades steigen nach oben ist unmöglich. Das ganze hat mir nun schon den zweiten Propeller gekostet. Ich kann nun natürlich nochmal die Gaswege anlernen aber bin sicher das es nichts bringen wird. (habe ich ja schon getan) Mittelwerte habe ich nun alle per SubTrim auf 1500. Über trimmen an der Funke erreiche ich maximal das Gegenteil. Der Copter yawt dann nach rechts. Ein funktionierendes Setup habe ich noch nicht gefunden. Bin am weitersuchen. Kann es ein leicht Off Axis angebrachter Lipo verursachen?
Im Moment suche ich aber immer noch nach einer Lösung für das Yaw Problem. Bin gerade eben nochmal bei Windstille geflogen und konnte folgendes beobachten. Der Copter yawt sofort nach links wenn ich Gas gebe. Gerades steigen nach oben ist unmöglich. Das ganze hat mir nun schon den zweiten Propeller gekostet. Ich kann nun natürlich nochmal die Gaswege anlernen aber bin sicher das es nichts bringen wird. (habe ich ja schon getan) Mittelwerte habe ich nun alle per SubTrim auf 1500. Über trimmen an der Funke erreiche ich maximal das Gegenteil. Der Copter yawt dann nach rechts. Ein funktionierendes Setup habe ich noch nicht gefunden. Bin am weitersuchen. Kann es ein leicht Off Axis angebrachter Lipo verursachen?Hi droid,
das kann an mehreren sachen liegen .. aber am heufigsten liegt es an vibrationen. also halt den copter mal in der hand und gieb was gas .. im idealfall solltest du kaum-keine virationen haben .. ansonsten.. motoren wuchten:
http://www.youtube.com/watch?v=OgvayWfey78
und propeller auswuchten .. . viele glauben nicht wieviel das ausmacht..
gruß
Felix
das kann an mehreren sachen liegen .. aber am heufigsten liegt es an vibrationen. also halt den copter mal in der hand und gieb was gas .. im idealfall solltest du kaum-keine virationen haben .. ansonsten.. motoren wuchten:
http://www.youtube.com/watch?v=OgvayWfey78
und propeller auswuchten .. . viele glauben nicht wieviel das ausmacht..
gruß
Felix
Werde ich noch alles machen. Nach einem kapitalen Crash brauche ich nun erstmal neue Arme. Ich kann bestätigen das sich die Arme super schnell verbiegen. Jetzt übe ich erstmal weiter mit dem MQX. Die Orientierungs Blackouts haben mit dem Wii Copter zugenommen da er deutlich schneller ist. Jetzt schraube ich erstmal noch die Rate ganz nach unten.
Erster Erfahrungsbericht nach vier Flugtagen.
Für einen Anfänger sind die Arme meiner Meinung nach nicht zu empfehlen. Jeder Sturz auf den Arm führt unweigerlich zu einem verbiegen. (selbst Stürze aus geringer Höhe) Nach drei Stürzen habe ich nun in alle Richtungen verbogene Arme, was automatisch zu einem gearen führt. Durch die Länge entsteht ein ziemlicher Hebel der den Arm so verbiegen lässt. Wenn jemand von euch eine stabilere Variante kennt dann immer her damit.
Der Tipp die Motorschrauben nicht zu verwenden ist Gold wert. Die abgerundeten Schraubenköpfe lassen sich einfach an den Armen nicht richtig stabil befestigen.
Ansonsten macht das fliegen mit dem Paket ziemlich Spaß und so langsam kommt auch das Gefühl. :thumbup:
Für einen Anfänger sind die Arme meiner Meinung nach nicht zu empfehlen. Jeder Sturz auf den Arm führt unweigerlich zu einem verbiegen. (selbst Stürze aus geringer Höhe) Nach drei Stürzen habe ich nun in alle Richtungen verbogene Arme, was automatisch zu einem gearen führt.
Durch die Länge entsteht ein ziemlicher Hebel der den Arm so verbiegen lässt. Wenn jemand von euch eine stabilere Variante kennt dann immer her damit. Der Tipp die Motorschrauben nicht zu verwenden ist Gold wert. Die abgerundeten Schraubenköpfe lassen sich einfach an den Armen nicht richtig stabil befestigen.
Ansonsten macht das fliegen mit dem Paket ziemlich Spaß und so langsam kommt auch das Gefühl. :thumbup:
Hiho
Die Arme sind schon OK, hatte erst nach dem 10 absturz ein Arm verbogen,und ich zähl mich auch als Anfänger beim Fliegen.
Sonst hol dir zum Üben aus dem Baumarkt 10x10 (is auch nicht besser oder 15x15mm Alu4kant rohr.
Musst nur selbst sägen und Bohren.
Oder so ein Hartplastikrahmen,der is meiner Meinnung nach aber nicht so der Hit.
http://www.hobbyking.com/hobbyking/store/__502__501__Multi_Rotors_Parts-Frames_Kits.html
Oder die Teure Variante CFK Rohr, das mag aber garnicht gern gequescht werden, oder ein Schlag abkriegen, an den Enden.
Im Endeffekt geht jeder Rahmen zu Bruch bei Absturz (wenn Gewicht Geschwindigkeit und Aufschlagwinkel stimmen.), und die Motorwellen kriegen auch dann gern ein wech.
Mein Erster Copter war mit 13x13mm 4kant Eiche und Buche geht auch supi, is halt nur schwerer. Als nebeneffekt das Holz passt genau in die 15x15 Alu4kantrohre z.b. Motorhalter, Steckbarer Rahmen
und wech
Die Arme sind schon OK, hatte erst nach dem 10 absturz ein Arm verbogen,und ich zähl mich auch als Anfänger beim Fliegen.
Sonst hol dir zum Üben aus dem Baumarkt 10x10 (is auch nicht besser
oder 15x15mm Alu4kant rohr.Musst nur selbst sägen und Bohren.
Oder so ein Hartplastikrahmen,der is meiner Meinnung nach aber nicht so der Hit.
http://www.hobbyking.com/hobbyking/store/__502__501__Multi_Rotors_Parts-Frames_Kits.html
Oder die Teure Variante CFK Rohr, das mag aber garnicht gern gequescht werden, oder ein Schlag abkriegen, an den Enden.
Im Endeffekt geht jeder Rahmen zu Bruch bei Absturz (wenn Gewicht Geschwindigkeit und Aufschlagwinkel stimmen.)
, und die Motorwellen kriegen auch dann gern ein wech. Mein Erster Copter war mit 13x13mm 4kant Eiche und Buche geht auch supi, is halt nur schwerer. Als nebeneffekt das Holz passt genau in die 15x15 Alu4kantrohre z.b. Motorhalter, Steckbarer Rahmen
und wech

