Produce your own Accel Graphs to Evaluate your Vibration Control Success
In order to evaluate your own Vibration you will need to perform a simple test flight and generate an appropriate flight log and then after the flight display the relevant accelerometer data.
In order to record the necessary Accelerometer data to your flight logs you will need to enable RAW mode in the "Log" recording function of the APM (which is off by default).
Hook up your APM to you PC with the USB cable.
Start the Mission Planner Software on your PC.
DO NOT select the connection icon but instead select Terminal mode.
Type in "logs" and the enter key.
Type in "enable raw" and the enter key.
Raw Accelerometer and Gyro information for all 3 axes will now be recorded to the flight log that is produced each time you fly.
Disconnect from the PC.
Test fly your MultiCopter and acquire an appropriate Flight Log.
Hook up your Copter to fly as you normally would.
In calm winds make a short test flight.
In stabilize mode arm the copter (this will begin recording of the flight log).
Take off and hover a few feet off the ground.
Fly for 30 seconds or so stably hovering then land.
Disarm (very important to cause saving of recorded flight data.)
Disconnect your battery and return to your computer.
Display the Accel information you just recorded in Mission Planner
Hook your APM up to your PC as before with the USB cable and start Mission Planner.
DO NOT select the "Connection" icon but instead select Terminal mode.
In Terminal mode select the "Download Logs" tab.
When it displays a list of logs (may take a while) scroll down to the bottom log (the one you just recorded) and select it.
Then select the "Download These Logs" item.
Select "Exit".
Now select the "Browse Logs" tab.
Select the log you just downloaded.
You will be presented with a blank graph screen and several lines of text on the bottom of the screen.
Scroll down to the first "RAW" item heading on the left column of the text.
Click on the heading "RAW".
You will now see at the top of the text column headings for Gyro and Accel.
Select the box to the right of "RAW" under the "ACCEL X" column.
Select the "Graph This" box which will graph your accelerometers X displacement for the duration of your flight.
Repeat the above for "ACCEL Y" and "ACCEL Z".
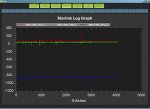
Interpret your Flight Logs Accelerometer information.
It is probably advisable to just window a portion of the flight log graph with the mouse and click it to display a smaller selection from a stable portion of the flight.
You will want to see the normal vertical excursions of the vibration present on the Accel axes so window accordingly.
The vertical numbers on the left of the graph are (I believe) in meters per second / per second however, due to a fortuitous circumstance 9.8 meters per second per second is one Gravity so 10 vertical units may be reasonably interpreted as one G.
Each vertical graph division is one tenth G.
Your vibration amplitude is what is significant here and that should be clearly visible to you now.
Keep in mind that the Accel Z axis is the vertical axis which will be offset by one G (or - 10) on the graphs scale.
The 2 horizontal Accelerometer X and Y should be centered around 0.
Your vibration amplitude is read relative to zero for the X and Y axes and relative to -10 for the vertical Z axis.
Vibration amplitude should be taken as the excursion from the axis 0 offset point in either direction, thus + and - 5 for example.
Since the Z axis is offset by gravity to - 10 a vibration amplitude from - 5 to - 15 would still be an amplitude of + and - 5.
A vibration amplitude of + and - 5 as above would represent one half G.
Since most of our flying takes place well inside the + and - one G range and we are attempting to use actual inertial movement of our airframe to determine location and level you can see that any vibration greatly interferes with this process.
The APM's internal software filtering can extract sufficient data for inertial navigation from vibration excursions of less than 1/2 G (5 on our scale).
However, reducing the vibration amplitude of each axis even lower, possibly even below one tenth G is a worthy pursuit and will be rewarded very stable horizontal and vertical position maintenance and smooth control.
Quelle:
http://code.google.com/p/arducopter/wiki/VibrationControl

")