
"UltraESC" bald gibt's was Neues
- Themenstarter ronco
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
hi,
.. also so ist halt entwicklung .. glaub mir, mir wäre nix lieber als wenn die teile immer sofort da wären.
aber ich mach eben nur entwicklung und hab kaum einfluss darauf was wie schnell gemacht wird..
den neuen bestücker hab ich.. der macht grade neue 20A (in bulgarien - nicht china) und da die's zum glück sehr genau nehmen, dauert's da eben auch länger (bauteile, lieferanten usw..)
troz das ich für flyduino arbeite, bin ich immer noch hier auch als "fanatischer hobby mensch" und da grade dieses projekt auch eben genau daraus entstanden ist, will ich hier keine werbe predigen halten.. da wäres vllt. klüger gewesen irgend welche schlau klingenden storys auf zu tischen..
gruß
felix
.. also so ist halt entwicklung .. glaub mir, mir wäre nix lieber als wenn die teile immer sofort da wären.
aber ich mach eben nur entwicklung und hab kaum einfluss darauf was wie schnell gemacht wird..
den neuen bestücker hab ich.. der macht grade neue 20A (in bulgarien - nicht china) und da die's zum glück sehr genau nehmen, dauert's da eben auch länger (bauteile, lieferanten usw..)
troz das ich für flyduino arbeite, bin ich immer noch hier auch als "fanatischer hobby mensch" und da grade dieses projekt auch eben genau daraus entstanden ist, will ich hier keine werbe predigen halten.. da wäres vllt. klüger gewesen irgend welche schlau klingenden storys auf zu tischen..
gruß
felix
Ich hab schon öfter gedacht, Du weißt ja nur wo gerade hinten und vorne ist, weil Du immer so nervös rumwackelst, wenn Du mal mit einer DSLR drauf einen gaaaaanz ruhigen großen Kreis um den Platz mit 10km/h machen solltest, würdest Du nach 1min im nächsten Buam hängen...
Ziemlich interessantes Projekt, aber des Verständnisses halber noch eine Frage:
Wie wird kommutiert? Trotz irgendeines Posts mit dem Sinus, gehe ich davon aus, dass trapezoidal gesteuert wird, richtig?
Schafft man bei den typischen Drehzahlen am Kopter überhaupt noch eine sinusoidale Steuerung?
Da wäre wahrscheinlich schon bald Field Oriented Control notwendig, oder? Aber das macht wohl der Controller nicht mehr mit, wenn ich recht in der Annahme gehe, dass ein 32U4 verbaut ist?
Wäre ja schon effizienztechnisch ganz nett, wenn nicht 20 % der Energie in Lagerzerstörung investiert würde
Mit freundlichen Grüßen
Hexakopter
Wie wird kommutiert? Trotz irgendeines Posts mit dem Sinus, gehe ich davon aus, dass trapezoidal gesteuert wird, richtig?
Schafft man bei den typischen Drehzahlen am Kopter überhaupt noch eine sinusoidale Steuerung?
Da wäre wahrscheinlich schon bald Field Oriented Control notwendig, oder? Aber das macht wohl der Controller nicht mehr mit, wenn ich recht in der Annahme gehe, dass ein 32U4 verbaut ist?
Wäre ja schon effizienztechnisch ganz nett, wenn nicht 20 % der Energie in Lagerzerstörung investiert würde
Mit freundlichen Grüßen
Hexakopter
Hi,
ja im normal betrieb ist das block kommutierung. nur im servo mode giebts sinus. und ja ist ein 32u4
zur schnellen sinus ansteuerung.. da giebts mittlerweile mit FOC und dem richtigen uC auch möglichkeiten das schnell genug zu machen. aber problem an FOC ist halt immer das man entweder nur festgelegte motore mit passenden propellern nehmen kann oder eben die daten des angeschlossenen motors pingelig genau wissen und eigeben muss. da ist plug and play vorbei
ah und die HW ist generell auwändiger / teurer ..
und soweit ich weis holt sinus kommutierung nicht 20% sondern 2-4% leisstung raus. wird aber bestimmt bald kommen
gruß
felix
ja im normal betrieb ist das block kommutierung. nur im servo mode giebts sinus
. und ja ist ein 32u4 zur schnellen sinus ansteuerung.. da giebts mittlerweile mit FOC und dem richtigen uC auch möglichkeiten das schnell genug zu machen. aber problem an FOC ist halt immer das man entweder nur festgelegte motore mit passenden propellern nehmen kann oder eben die daten des angeschlossenen motors pingelig genau wissen und eigeben muss. da ist plug and play vorbei
ah und die HW ist generell auwändiger / teurer ..
und soweit ich weis holt sinus kommutierung nicht 20% sondern 2-4% leisstung raus. wird aber bestimmt bald kommen
gruß
felix
Hi,
Danke erst einmal für die ausführliche Antwort!
Mir fiel auch noch ein, dass AFW auch nur Sinn bei Trapezoidaler Steuerung macht, wenn ich das richtig verstanden habe.
Ich lese mich nämlich da im Moment ein wenig ein, aber so ganz durchstiegen habe ich das wohl noch nicht.
Aus welchem Grund geht denn das Plug & Play nicht mehr, also an welcher Stelle bei FOC ist denn der entscheidende Unterschied?
Und klar, man müsste zumindest zwei Phasenströme noch mehr oder weniger genau bestimmen, was dann hardwaremäßig natürlich teurer würde.
Ich hatte mal irgendwo bis zu 30 % bei FOC gelesen, habe aber da nicht weiter nachgelesen. Dachte mir nur, das kann schon hinhauen, weil es sind ja immerhin bis zu 30 Grad Unterschied zwischen den Vektoren im idealen und realen Fall (also direct und quadrature). Und alle parallelen Komponenten des induzierten Magnetfeldes sorgen doch lediglich für eine Lagerquerbelastung, oder?
Was darf ich denn aus dem "wird bald kommen" schließen?! Dass die UltraESCs das bald beherrschen?!
Sinuskommutierung könnte der 32U4 auch noch schaffen, nur FOC dürfte nicht mehr drin sein?!
Wobei es da ja schon schöne Controller gibt, mit quasi-hardware FOC (TMPM370), wie ich letztens gesehen habe
Grüße
Hexakopter
Danke erst einmal für die ausführliche Antwort!
Mir fiel auch noch ein, dass AFW auch nur Sinn bei Trapezoidaler Steuerung macht, wenn ich das richtig verstanden habe.
Ich lese mich nämlich da im Moment ein wenig ein, aber so ganz durchstiegen habe ich das wohl noch nicht.
Aus welchem Grund geht denn das Plug & Play nicht mehr, also an welcher Stelle bei FOC ist denn der entscheidende Unterschied?
Und klar, man müsste zumindest zwei Phasenströme noch mehr oder weniger genau bestimmen, was dann hardwaremäßig natürlich teurer würde.
Ich hatte mal irgendwo bis zu 30 % bei FOC gelesen, habe aber da nicht weiter nachgelesen. Dachte mir nur, das kann schon hinhauen, weil es sind ja immerhin bis zu 30 Grad Unterschied zwischen den Vektoren im idealen und realen Fall (also direct und quadrature). Und alle parallelen Komponenten des induzierten Magnetfeldes sorgen doch lediglich für eine Lagerquerbelastung, oder?
Was darf ich denn aus dem "wird bald kommen" schließen?! Dass die UltraESCs das bald beherrschen?!
Sinuskommutierung könnte der 32U4 auch noch schaffen, nur FOC dürfte nicht mehr drin sein?!
Wobei es da ja schon schöne Controller gibt, mit quasi-hardware FOC (TMPM370), wie ich letztens gesehen habe
Grüße
Hexakopter
Moins,
ach die Blockkommultierung ist schon ok. Einzig der Anlauf ist das Problem, da man noch nicht die B_EMF messen kann. Stichwort virtueller Sternpunkt... Ich glaube auch das es wenig bringt und sehr aufwendig ist mit einer FOC zu arbeiten. Entweder jeder Motor bekommt eine Lageerkennung (Hall, Encoder) und/oder man muss es über Modelle lösen, Stichwort Motormodell mit Kalmanfilter. Welcher aber im Anlauf das gleiche Problem mit der Lage hat und ein exaktes Motormodell benötigt. Alles im allen nicht ganz so einfach ;-)
Es müsste aber auch eine FOC möglich sein ohne Positionserkennung nur mit dem virtuellen Stern, da hat ronco schon Recht, dass jeder Motor einzeln angepasst werden muss... Ich will das definitiv nicht umsetzen. Einzig der Verkauf von Motor + Regler macht hier Sinn, und das wird dann so irrsinnig teuer sein, dass sich das niemals eine Privatperson kaufen wird (zumindest keinen >=Hexa ;-) )
Da macht es eher Sinn einen Motor mit wirklichem trapezförmigem magnetischem Fluss aufzubauen, dann sind die Verluste auch geringer. Macht mal den Test und messt eure induzierten Spannungen an eurem BLDC, diese sind wahrscheinlich eher sinusförmig.
Kauft euch lieber ein paar Akkus und fertig ist
Gruß Terminus
ach die Blockkommultierung ist schon ok. Einzig der Anlauf ist das Problem, da man noch nicht die B_EMF messen kann. Stichwort virtueller Sternpunkt... Ich glaube auch das es wenig bringt und sehr aufwendig ist mit einer FOC zu arbeiten. Entweder jeder Motor bekommt eine Lageerkennung (Hall, Encoder) und/oder man muss es über Modelle lösen, Stichwort Motormodell mit Kalmanfilter. Welcher aber im Anlauf das gleiche Problem mit der Lage hat und ein exaktes Motormodell benötigt. Alles im allen nicht ganz so einfach ;-)
Es müsste aber auch eine FOC möglich sein ohne Positionserkennung nur mit dem virtuellen Stern, da hat ronco schon Recht, dass jeder Motor einzeln angepasst werden muss... Ich will das definitiv nicht umsetzen. Einzig der Verkauf von Motor + Regler macht hier Sinn, und das wird dann so irrsinnig teuer sein, dass sich das niemals eine Privatperson kaufen wird (zumindest keinen >=Hexa ;-) )
Da macht es eher Sinn einen Motor mit wirklichem trapezförmigem magnetischem Fluss aufzubauen, dann sind die Verluste auch geringer. Macht mal den Test und messt eure induzierten Spannungen an eurem BLDC, diese sind wahrscheinlich eher sinusförmig.
Kauft euch lieber ein paar Akkus und fertig ist
Gruß Terminus
Moins,
ach die Blockkommultierung ist schon ok. Einzig der Anlauf ist das Problem, da man noch nicht die B_EMF messen kann. Stichwort virtueller Sternpunkt... Ich glaube auch das es wenig bringt und sehr aufwendig ist mit einer FOC zu arbeiten. Entweder jeder Motor bekommt eine Lageerkennung (Hall, Encoder) und/oder man muss es über Modelle lösen, Stichwort Motormodell mit Kalmanfilter. Welcher aber im Anlauf das gleiche Problem mit der Lage hat und ein exaktes Motormodell benötigt. Alles im allen nicht ganz so einfach ;-)
Es müsste aber auch eine FOC möglich sein ohne Positionserkennung nur mit dem virtuellen Stern, da hat ronco schon Recht, dass jeder Motor einzeln angepasst werden muss... Ich will das definitiv nicht umsetzen. Einzig der Verkauf von Motor + Regler macht hier Sinn, und das wird dann so irrsinnig teuer sein, dass sich das niemals eine Privatperson kaufen wird (zumindest keinen >=Hexa ;-) )
Da macht es eher Sinn einen Motor mit wirklichem trapezförmigem magnetischem Fluss aufzubauen, dann sind die Verluste auch geringer. Macht mal den Test und messt eure induzierten Spannungen an eurem BLDC, diese sind wahrscheinlich eher sinusförmig.
Kauft euch lieber ein paar Akkus und fertig ist
Gruß Terminus
ach die Blockkommultierung ist schon ok. Einzig der Anlauf ist das Problem, da man noch nicht die B_EMF messen kann. Stichwort virtueller Sternpunkt... Ich glaube auch das es wenig bringt und sehr aufwendig ist mit einer FOC zu arbeiten. Entweder jeder Motor bekommt eine Lageerkennung (Hall, Encoder) und/oder man muss es über Modelle lösen, Stichwort Motormodell mit Kalmanfilter. Welcher aber im Anlauf das gleiche Problem mit der Lage hat und ein exaktes Motormodell benötigt. Alles im allen nicht ganz so einfach ;-)
Es müsste aber auch eine FOC möglich sein ohne Positionserkennung nur mit dem virtuellen Stern, da hat ronco schon Recht, dass jeder Motor einzeln angepasst werden muss... Ich will das definitiv nicht umsetzen. Einzig der Verkauf von Motor + Regler macht hier Sinn, und das wird dann so irrsinnig teuer sein, dass sich das niemals eine Privatperson kaufen wird (zumindest keinen >=Hexa ;-) )
Da macht es eher Sinn einen Motor mit wirklichem trapezförmigem magnetischem Fluss aufzubauen, dann sind die Verluste auch geringer. Macht mal den Test und messt eure induzierten Spannungen an eurem BLDC, diese sind wahrscheinlich eher sinusförmig.
Kauft euch lieber ein paar Akkus und fertig ist
Gruß Terminus
Die Motoren mit Halleffektsensoren oder Encodern sind aber um einiges mehr teurer und aufwendiger als ein yC, der ein bisschen Dampf hat. Deswegen bin ich bisher immer der Meinung gewesen, lieber ein bisschen mehr Software
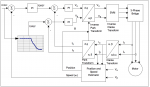
Wenn ich dich richtig verstehe, dann braucht man also im Bereich "Position and Speed Estimator" aufwendige Mathematik/Reglungstechnik?
Weil statt BEMF oder Positionssensoren sind hier ja nur zwei Phasenströme notwendig zu messen. Das sollte ja nicht soo ein riesiger Mehraufwand sein.
Und die Anpassungen auf den Motor sind dann auch im "Position and Speed Estimator" bzw den PI-Parametern notwendig? Weil Park und Clark sowie dessen Inverse sollten ja nicht motorspezifisch sein
Genau, gerade weil die induzierten Spannungen in meinem Motor wunderschön sinusförmig sind, bin ich ja der Meinung, dass trapezoidal recht ineffizient ist.
Und andere Motoren zu entwickeln ist ja auch wieder teurer, als intelligente Software...
Viele Grüße
Hexakopter
[Bild: http://ww1.microchip.com/downloads/en/appnotes/01078b.pdf]
Anhänge
-
 205 KB Aufrufe: 37
205 KB Aufrufe: 37
Zuletzt bearbeitet:
ne dank simon k ist es viel effizienter geworden. Aber auch nur Lastfrei, was ja am Kopter quasi der Fall ist.
Die Strommessung ist nicht das Problem kostet halt Kohle, nur die Positionserkennung /Abschätzung ist es. die Park-Transformationen benötigen auch noch den genauen Rotorwinkel, sonst ist das ganze recht ineffektiv. Um den genauen Posiwert zu bekommen braucht man ein genaues Motormodell oder einen Sensor. Hinzu kommt noch, dass die Modellbaumotoren viele Polpaare haben... in die Park geht der elektrische Winkel. Dein Bild ist nicht ganz korrekt, die Störgrößenaufschaltung der induzierten Spannung benötigt zusätzlcihe die aktuelle GEschwindigkeit (und die Motordaten)
Sonst kann man den PI-Regler nicht so einfach auslegen da die Strecke nicht mehr linear ist... (da man die Regler aber sovieso nicht spezifisch programmieren kann ist es auch egal)
Wäre auch mal nett zu sehen in welchen Bereich man die Feldschwächung treiben kann damit man noch schub rausholen kann
Gruß Termi
Die Strommessung ist nicht das Problem kostet halt Kohle, nur die Positionserkennung /Abschätzung ist es. die Park-Transformationen benötigen auch noch den genauen Rotorwinkel, sonst ist das ganze recht ineffektiv. Um den genauen Posiwert zu bekommen braucht man ein genaues Motormodell oder einen Sensor. Hinzu kommt noch, dass die Modellbaumotoren viele Polpaare haben... in die Park geht der elektrische Winkel. Dein Bild ist nicht ganz korrekt, die Störgrößenaufschaltung der induzierten Spannung benötigt zusätzlcihe die aktuelle GEschwindigkeit (und die Motordaten)
Sonst kann man den PI-Regler nicht so einfach auslegen da die Strecke nicht mehr linear ist... (da man die Regler aber sovieso nicht spezifisch programmieren kann ist es auch egal)
Wäre auch mal nett zu sehen in welchen Bereich man die Feldschwächung treiben kann damit man noch schub rausholen kann
Gruß Termi
Hatte das Schema jetzt von hier http://ww1.microchip.com/downloads/en/appnotes/01078b.pdf
Habe das Dokument auch noch nicht richtig gelesen aber befürchte, dass ich es auch noch nicht so ganz verstehen werde. Das Problem ist, dass mir eine Menge Grundlagen fehlen, und ich mich erst seit 3, 4 Tagen mit der Materie beschäftige.
Nur fängt das bei mir schon an, dass ich ein PI-Regler nicht vollständig verstanden habe, weil man das bis zum 2. Semester noch nicht gemacht hat -.-
Dauert wohl noch ein bisschen, bis ich da mal einen gescheiten Durchblick habe.
Muss mal in die Bib an der Uni und nach Fachliteratur suchen, das dauernde Application Note lesen ist ja schön und gut, aber mir fehlen leider noch ein paar Grundlagen.
Habe das Dokument auch noch nicht richtig gelesen aber befürchte, dass ich es auch noch nicht so ganz verstehen werde. Das Problem ist, dass mir eine Menge Grundlagen fehlen, und ich mich erst seit 3, 4 Tagen mit der Materie beschäftige.
Nur fängt das bei mir schon an, dass ich ein PI-Regler nicht vollständig verstanden habe, weil man das bis zum 2. Semester noch nicht gemacht hat -.-
Dauert wohl noch ein bisschen, bis ich da mal einen gescheiten Durchblick habe.
Muss mal in die Bib an der Uni und nach Fachliteratur suchen, das dauernde Application Note lesen ist ja schön und gut, aber mir fehlen leider noch ein paar Grundlagen.
Hi,
ja also fürs UESC ginge sinus wirklich nur mit sensoren. aber das will ich nicht. und auch wenn das für einen block kommu. regler schon recht effektiv ist, ging es mir ja hauptsächlich um eine schnelle und saubere drehzahlsteuerung des motors. und die geht so ganz gut.
und wie man beim vor/rückwertslauf sehen kann, haben weder simonk noch das uesc probleme mit dem blind anlaufen
wenn man aber FOC nehmen will, muss das eben auch sauber laufen damit der motor fein geregelt werden kann. ich denke das das für den "einfachen" copter berreich so schnell nix wird. mit das wirds bestimmt bald geben meinte ich eigentlich die uC's die im moment rauskommen (z. b http://www.toshiba-components.com/automotive/MotorControlTechnology.html) weiss net obs der war, aber da giebts schon welche die brauchen nur einen strom sensor und machen den rest virtuel.
diese ganzen FOC uC's sind aber meisstens für langsam leufer gedacht. und ja wird sich zeigen ob die auch bei so "hohen" drehzahlen wie wir sie brauchen noch sauber laufen. es giebt da ja beispiele (https://vimeo.com/56773384) der hat das mit irgenteinem PIC uC gemacht .. ist aber auch eben nur auf diesen motor mit diesem prob. abgestimmt.
noch ein vorteil einer sinus ansteuerung wäre das die leiser sind .. kein pfeifen mehr .. also sehe so regler eher in der high end videocopter klasse.
aber mal sehn
gruß
felix
ja also fürs UESC ginge sinus wirklich nur mit sensoren. aber das will ich nicht. und auch wenn das für einen block kommu. regler schon recht effektiv ist, ging es mir ja hauptsächlich um eine schnelle und saubere drehzahlsteuerung des motors. und die geht so ganz gut.
und wie man beim vor/rückwertslauf sehen kann, haben weder simonk noch das uesc probleme mit dem blind anlaufen
wenn man aber FOC nehmen will, muss das eben auch sauber laufen damit der motor fein geregelt werden kann. ich denke das das für den "einfachen" copter berreich so schnell nix wird. mit das wirds bestimmt bald geben meinte ich eigentlich die uC's die im moment rauskommen (z. b http://www.toshiba-components.com/automotive/MotorControlTechnology.html) weiss net obs der war, aber da giebts schon welche die brauchen nur einen strom sensor und machen den rest virtuel.
diese ganzen FOC uC's sind aber meisstens für langsam leufer gedacht. und ja wird sich zeigen ob die auch bei so "hohen" drehzahlen wie wir sie brauchen noch sauber laufen. es giebt da ja beispiele (https://vimeo.com/56773384) der hat das mit irgenteinem PIC uC gemacht .. ist aber auch eben nur auf diesen motor mit diesem prob. abgestimmt.
noch ein vorteil einer sinus ansteuerung wäre das die leiser sind .. kein pfeifen mehr
.. also sehe so regler eher in der high end videocopter klasse.aber mal sehn
gruß
felix
Ja, keine Frage, dass die UESC schon gute Blockkommutierung machen, das will ich auch garnicht anzweifeln (bin ja vorallem auch von dem Umschalten der Drehrichtung in der Luft beeindruckt, dass es da nicht einfach nur alles zerfetzt ), aber nachdem ich mich ein wenig angefangen hatte in das Thema einzulesen, war ich etwas verwundert, wie 'schlecht' Blockkommutierung prinzipiell geeignet ist, aber wie gut sie dafür doch funktioniert.
Also insbesondere war ich davon überzeugt, dass man große Effizienzsteigerung erreichen könnte, weil es nur noch die "Quadrature"-Komponente geben würde, und man eben nicht nur 6 Magnetflussrichtungen erreichen kann. Außerdem würde das ja die Lager auch wesentlich weniger belasten. Und zu guter letzt keine komischen Geräusche und Schwingungen mehr, da man nicht mehr mit quasi unendlicher Steigung Strom und Spannung einschaltet, was ja bekanntlichermaßen nach Fourier zu schönsten Oberwellen führt
Ich habe mich auch schonmal nach diesem TMPM370 umgesehen, ihn aber nicht wirklich im Handel gefunden. Bin dann aber über einen Design-Wettbewerb von Elektor gestolpert, wo es ihn scheinbar doch schon gibt. http://www.elektor-projects.com/project/design-wettbewerb-mit-toshibas-m370.12988.html
Ah, cool, sowas hatte ich schonmal gesucht, aber nicht gefunden. Scheint ja schon ganz anständig zu laufen bei ihm. Da wäre ich ja mal an gemessener Effizienzerhöhung interessiert.
Und dass man solche Regler nicht auf einem Heizerkopter verwenden würde, ist ja klar.
Gruß
Hexakopter
), aber nachdem ich mich ein wenig angefangen hatte in das Thema einzulesen, war ich etwas verwundert, wie 'schlecht' Blockkommutierung prinzipiell geeignet ist, aber wie gut sie dafür doch funktioniert.Also insbesondere war ich davon überzeugt, dass man große Effizienzsteigerung erreichen könnte, weil es nur noch die "Quadrature"-Komponente geben würde, und man eben nicht nur 6 Magnetflussrichtungen erreichen kann. Außerdem würde das ja die Lager auch wesentlich weniger belasten. Und zu guter letzt keine komischen Geräusche und Schwingungen mehr, da man nicht mehr mit quasi unendlicher Steigung Strom und Spannung einschaltet, was ja bekanntlichermaßen nach Fourier zu schönsten Oberwellen führt
Ich habe mich auch schonmal nach diesem TMPM370 umgesehen, ihn aber nicht wirklich im Handel gefunden. Bin dann aber über einen Design-Wettbewerb von Elektor gestolpert, wo es ihn scheinbar doch schon gibt. http://www.elektor-projects.com/project/design-wettbewerb-mit-toshibas-m370.12988.html
Ah, cool, sowas hatte ich schonmal gesucht, aber nicht gefunden. Scheint ja schon ganz anständig zu laufen bei ihm. Da wäre ich ja mal an gemessener Effizienzerhöhung interessiert.
Und dass man solche Regler nicht auf einem Heizerkopter verwenden würde, ist ja klar.
Gruß
Hexakopter
Hi,
ja also zur effizienz. klar ist da mehr möglich, wieviel genau weiss ich aber auch nicht. wass ich aber weiss ist das man mit dem richtigen motor und blockommutierung schon auf knapp über 90% kommen kann. also habe mal im RC-Network gesehen das einer da 91,xx% geschafft hatte. und ein paar prozent werden ja immer an lager, luft und leitungen hängenbleiben. deshalb denke ich nicht das die effizienz da wirklich groß ins gewicht fallen wird. zumindest bei modellflieger motore und drehzalen nicht. aber klar was die laufruhe angeht ist da bestimmt eine besserung zu erwarten.
ich glaube halt im moment auch noch das es schwieriger ist, gleich schnelle reaktionen mit FOC hinzubekommen. weil man eben nicht einfach das PWM hochfahren kann und dann guckt wann das nächste zero crossing kommt, sondern die sinuskurven ja immer erst einmal ins blaue vorgegeben werden und man erst nachher sieht obs gepasst hat und was man anpassen muss. und so brauchts denke ich immer ein paar elektrische umdrehungen um sich auf eine neue drehzahl ein zu stellen. aber ich lass mich da auch gerne eines besseren belehren .. sind nur meine gedanken dazu
gruß
felix
ja also zur effizienz. klar ist da mehr möglich, wieviel genau weiss ich aber auch nicht. wass ich aber weiss ist das man mit dem richtigen motor und blockommutierung schon auf knapp über 90% kommen kann. also habe mal im RC-Network gesehen das einer da 91,xx% geschafft hatte. und ein paar prozent werden ja immer an lager, luft und leitungen hängenbleiben. deshalb denke ich nicht das die effizienz da wirklich groß ins gewicht fallen wird. zumindest bei modellflieger motore und drehzalen nicht. aber klar was die laufruhe angeht ist da bestimmt eine besserung zu erwarten.
ich glaube halt im moment auch noch das es schwieriger ist, gleich schnelle reaktionen mit FOC hinzubekommen. weil man eben nicht einfach das PWM hochfahren kann und dann guckt wann das nächste zero crossing kommt, sondern die sinuskurven ja immer erst einmal ins blaue vorgegeben werden und man erst nachher sieht obs gepasst hat und was man anpassen muss. und so brauchts denke ich immer ein paar elektrische umdrehungen um sich auf eine neue drehzahl ein zu stellen. aber ich lass mich da auch gerne eines besseren belehren .. sind nur meine gedanken dazu
gruß
felix
Hi,
ja also zur effizienz. klar ist da mehr möglich, wieviel genau weiss ich aber auch nicht. wass ich aber weiss ist das man mit dem richtigen motor und blockommutierung schon auf knapp über 90% kommen kann. also habe mal im RC-Network gesehen das einer da 91,xx% geschafft hatte. und ein paar prozent werden ja immer an lager, luft und leitungen hängenbleiben. deshalb denke ich nicht das die effizienz da wirklich groß ins gewicht fallen wird. zumindest bei modellflieger motore und drehzalen nicht. aber klar was die laufruhe angeht ist da bestimmt eine besserung zu erwarten.
ich glaube halt im moment auch noch das es schwieriger ist, gleich schnelle reaktionen mit FOC hinzubekommen. weil man eben nicht einfach das PWM hochfahren kann und dann guckt wann das nächste zero crossing kommt, sondern die sinuskurven ja immer erst einmal ins blaue vorgegeben werden und man erst nachher sieht obs gepasst hat und was man anpassen muss. und so brauchts denke ich immer ein paar elektrische umdrehungen um sich auf eine neue drehzahl ein zu stellen. aber ich lass mich da auch gerne eines besseren belehren .. sind nur meine gedanken dazu
gruß
felix
ja also zur effizienz. klar ist da mehr möglich, wieviel genau weiss ich aber auch nicht. wass ich aber weiss ist das man mit dem richtigen motor und blockommutierung schon auf knapp über 90% kommen kann. also habe mal im RC-Network gesehen das einer da 91,xx% geschafft hatte. und ein paar prozent werden ja immer an lager, luft und leitungen hängenbleiben. deshalb denke ich nicht das die effizienz da wirklich groß ins gewicht fallen wird. zumindest bei modellflieger motore und drehzalen nicht. aber klar was die laufruhe angeht ist da bestimmt eine besserung zu erwarten.
ich glaube halt im moment auch noch das es schwieriger ist, gleich schnelle reaktionen mit FOC hinzubekommen. weil man eben nicht einfach das PWM hochfahren kann und dann guckt wann das nächste zero crossing kommt, sondern die sinuskurven ja immer erst einmal ins blaue vorgegeben werden und man erst nachher sieht obs gepasst hat und was man anpassen muss. und so brauchts denke ich immer ein paar elektrische umdrehungen um sich auf eine neue drehzahl ein zu stellen. aber ich lass mich da auch gerne eines besseren belehren .. sind nur meine gedanken dazu
gruß
felix
Vielen Dank für die kleine Nachhilfe und die Erklärungen über FOC auf jeden Fall mal.
Gruß
Hexakopter
- Status
- Nicht offen für weitere Antworten.

