
GEFUNDEN Einziehfahrwerk Tarot FY680
- Themenstarter Blumenkindle
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hallo,
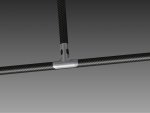
Hat jemand einen Tipp wo man die T-Stücke für das LG kaufen kann? Hab schon beim Drachenbau gestöbert aber nix gefunden.
Würde mir gerieben LG in den Wintermonaten zusammenbauen. Irgendwas muss man ja zum basteln haben ;-)
Gruß
Andreas
Hat jemand einen Tipp wo man die T-Stücke für das LG kaufen kann? Hab schon beim Drachenbau gestöbert aber nix gefunden.
Würde mir gerieben LG in den Wintermonaten zusammenbauen. Irgendwas muss man ja zum basteln haben ;-)
Gruß
Andreas
Hat jemand ne Idee wie ich ein Adapterstück bauen kann? Also vom rectractable auf den Ausleger. Mir fehlt irgendwie die Idee und einen 3D Drucker habe ich auch nicht
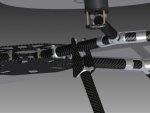
Problem ist, daß die Landebein-Aufnahme auf der (eingefahrenen) Oberseite bündig mit dem Drehstück sein muß, und es seitlich auf den ersten Millimetern nicht dicker als dasselbe sein darf.
Zuletzt bearbeitet:
Hier der Link zum t-Stück
http://www.rc-shopmk.de/epages/es26006.sf/de_DE/?ObjectPath=/Shops/es26006/Products/TL68B16
Gruß
Andreas
http://www.rc-shopmk.de/epages/es26006.sf/de_DE/?ObjectPath=/Shops/es26006/Products/TL68B16
Gruß
Andreas
Hallo Akai747fan,
Sieht schick aus deine Idee.
Den einzigen Nachteil bei einem normalen Servo ist dass es Strom zieht unter Belastung.
Ich hatte nur ein 0815 HK micro Servo zum testen, jedoch immer wenn das Ruderhorn belastet wird wirkt das Servo dagegen und zieht somit andauernd unnötig Strom. Im Schwebeflug sicherlich minimal wenn das Landegestell nicht zuviel wiegt. Beim Steigen oder Kurvenflug wird durch die Fliehkräfte dann mehr belastet und somit mehr Strom gezogen.
Man müsste den Stromverbrauch mal bei stärkeren Servos testen hatte ich leider keine Möglichkeit dazu.
Im ausgefahrenen Zustand wäre es ansich egal. Man startet ja schnellstmöglich und nach dem Landen ist ja sowieso der Akku meist leer.
Bin gerade dabei ein Mechanismus zu bauen wobei das Landegestell genau im eingefahrenen Zustand 90 Grad zum Ausleger steht und 70 Grad ausfährt mit jeweils einem kleinen Micro Getriebemotor und M3 Gewindestange je Seite mit ungefähr 2000u/min.
Die Elektronik besteht lediglich aus 2 RC Schaltern(Für beide Seiten zusammen)und 2 Endschalter(je Seite).
Kostenpunkt wäre um die 70 Euro für 2 Getriebemotoren, 2 RC-Schalter, 4 Endschalter.
Funktion ist einfach, Schalter an der Funke nach Oben, Landegestell fährt nach oben bis es am Endschalter ankommt. Dadurch wird die Stromversorgung unterbrochen(Seitenunabhängig) und das Landegestell bleibt stehen und somit ist nur noch ein Ausfahren wieder möglich. Schalter an der Funke nach unten und dir RC Schalter polen den Motor um und fahren das Landegestell aus bis es den Endschalter betätigt.
Der Vorteil des Gewindes liegt darin dass es durch die Steigung des Gewindes das Landegestell in Position hällt ohne die Belastung zu sehr auf den Motor zu übertragen.
Werde die Schaltung und mal eine Zeichnung rein stellen
Gruss
Christian
Sieht schick aus deine Idee.
Den einzigen Nachteil bei einem normalen Servo ist dass es Strom zieht unter Belastung.
Ich hatte nur ein 0815 HK micro Servo zum testen, jedoch immer wenn das Ruderhorn belastet wird wirkt das Servo dagegen und zieht somit andauernd unnötig Strom. Im Schwebeflug sicherlich minimal wenn das Landegestell nicht zuviel wiegt. Beim Steigen oder Kurvenflug wird durch die Fliehkräfte dann mehr belastet und somit mehr Strom gezogen.
Man müsste den Stromverbrauch mal bei stärkeren Servos testen hatte ich leider keine Möglichkeit dazu.
Im ausgefahrenen Zustand wäre es ansich egal. Man startet ja schnellstmöglich und nach dem Landen ist ja sowieso der Akku meist leer.
Bin gerade dabei ein Mechanismus zu bauen wobei das Landegestell genau im eingefahrenen Zustand 90 Grad zum Ausleger steht und 70 Grad ausfährt mit jeweils einem kleinen Micro Getriebemotor und M3 Gewindestange je Seite mit ungefähr 2000u/min.
Die Elektronik besteht lediglich aus 2 RC Schaltern(Für beide Seiten zusammen)und 2 Endschalter(je Seite).
Kostenpunkt wäre um die 70 Euro für 2 Getriebemotoren, 2 RC-Schalter, 4 Endschalter.
Funktion ist einfach, Schalter an der Funke nach Oben, Landegestell fährt nach oben bis es am Endschalter ankommt. Dadurch wird die Stromversorgung unterbrochen(Seitenunabhängig) und das Landegestell bleibt stehen und somit ist nur noch ein Ausfahren wieder möglich. Schalter an der Funke nach unten und dir RC Schalter polen den Motor um und fahren das Landegestell aus bis es den Endschalter betätigt.
Der Vorteil des Gewindes liegt darin dass es durch die Steigung des Gewindes das Landegestell in Position hällt ohne die Belastung zu sehr auf den Motor zu übertragen.
Werde die Schaltung und mal eine Zeichnung rein stellen
Gruss
Christian
Hallo Christian,
Servo wird aber nicht direkt ein Landebein ansteuern, sondern indirekt über eine Kulisse ähnlich einer Schnecke.
Vorteil in beiden Endstellungen ist das Fahrwerk eingerastet und Servo bleibt unbelastet.
Vor- und Nachteil, die Geometrie der Kulisse bestimmt den Winkel und kann nicht mehr verändert werden.
Grüße Radu
Servo wird aber nicht direkt ein Landebein ansteuern, sondern indirekt über eine Kulisse ähnlich einer Schnecke.
Vorteil in beiden Endstellungen ist das Fahrwerk eingerastet und Servo bleibt unbelastet.
Vor- und Nachteil, die Geometrie der Kulisse bestimmt den Winkel und kann nicht mehr verändert werden.
Grüße Radu
Hallo Radu,
Ok das konnte ich auf dem Bild nicht erkennen")
Klingt interessant. Würde gerne mal mehr davon sehen!
Eine andere Möglichkeit die ich mir doch noch offen lasse ist das HK Einziehfahrwerk.
Habe die Baugleichen SMD Taster gefunden die HK als Endschalter verbaut. Somit muss man den anderen Taster nicht entlöten. Wie ich ja schon schrieb ist eine Position zum Löten vorgesehen um den Taster zu versetzen wodurch ein anderer Ausfahrwinkel(<90 Grad) möglich ist.
Preislich wäre dies einfach am Günstigsten
Ein paar Fräs und Drehteile dazu, fertig.
Gruss
Christian
Ok das konnte ich auf dem Bild nicht erkennen
Klingt interessant. Würde gerne mal mehr davon sehen!
Eine andere Möglichkeit die ich mir doch noch offen lasse ist das HK Einziehfahrwerk.
Habe die Baugleichen SMD Taster gefunden die HK als Endschalter verbaut. Somit muss man den anderen Taster nicht entlöten. Wie ich ja schon schrieb ist eine Position zum Löten vorgesehen um den Taster zu versetzen wodurch ein anderer Ausfahrwinkel(<90 Grad) möglich ist.
Preislich wäre dies einfach am Günstigsten
Ein paar Fräs und Drehteile dazu, fertig.
Gruss
Christian
Hallo Christian,
ein Baubericht wird in kürze folgen. Ich möchte in erster Linie so leicht wie möglich bauen. Dann kommt noch ein 3D-BLGimbal.
Ein EZFW halte ich persönlich für nicht unbedingt lebensnotwendig. Wenn man mit größeren Kameras fliegt, hält man den Kopter sowieso ruhiger in der Luft, auch die Drehzahl auf den Motoren ist(sollte) eine andere (sein). Nur beim Schwenken der Kamera, hat man noch die Landebeine im Bild.
Verstehe ich das richtig, du möchtest die Schalter gleichzeitig als Referenz und Motorschalter einsetzen? Ich halte das für keine gute Idee, wenn es so sein sollte. Referenzschalter für die Position der Spindel(Gewindes) ja, aber dann würde ich das Steuersignal an einer Motorsteuerung für die weiter Verarbeitung senden. Linearsysteme scheinen auf dem ersten Blick sehr einfach, wenn sie aber dann funktionieren, sind sie doch recht komplex und anspruchsvoll.
Grüße Radu
ein Baubericht wird in kürze folgen. Ich möchte in erster Linie so leicht wie möglich bauen. Dann kommt noch ein 3D-BLGimbal.
Ein EZFW halte ich persönlich für nicht unbedingt lebensnotwendig. Wenn man mit größeren Kameras fliegt, hält man den Kopter sowieso ruhiger in der Luft, auch die Drehzahl auf den Motoren ist(sollte) eine andere (sein). Nur beim Schwenken der Kamera, hat man noch die Landebeine im Bild.
Verstehe ich das richtig, du möchtest die Schalter gleichzeitig als Referenz und Motorschalter einsetzen? Ich halte das für keine gute Idee, wenn es so sein sollte. Referenzschalter für die Position der Spindel(Gewindes) ja, aber dann würde ich das Steuersignal an einer Motorsteuerung für die weiter Verarbeitung senden. Linearsysteme scheinen auf dem ersten Blick sehr einfach, wenn sie aber dann funktionieren, sind sie doch recht komplex und anspruchsvoll.
Grüße Radu
Hallo Radu,
Klar ist das Einziehfahrwerk kein muss, jedoch bei einem 3 Achs Gimbal nie schlecht
Hatte mir hald überlegt was einfacher ist, das Gimbal mit Landegestell drehen oder ein Einziehfahrwerk.
Ich bin der Meinung dass ein Einziehfahrwerk einfacher zu realisieren ist und einfacher an verschiedene Modelle anpassabr ist.
Motorsteuerung? es handelt sich um einen Motor der an 6V läuft.
Es ist eine ganz einfache Steuerung/schaltung die hald 6V an den Motor anlegt und je nach Richtung umpolt.
Die Steuerung bringt hald nur mitsich dass das Fahrgestell bis zum Anschlag eingefahren werden muss bevor es wieder ausgefahren werden kann. Die RC Steuersignale gehen nur auf die RC Schalter(Fertigteile)
Wenn ich aus dem Urlaub zurück bin stelle ich die Schaltung rein.
Gruss
Christian
Klar ist das Einziehfahrwerk kein muss, jedoch bei einem 3 Achs Gimbal nie schlecht
Hatte mir hald überlegt was einfacher ist, das Gimbal mit Landegestell drehen oder ein Einziehfahrwerk.
Ich bin der Meinung dass ein Einziehfahrwerk einfacher zu realisieren ist und einfacher an verschiedene Modelle anpassabr ist.
Motorsteuerung?
es handelt sich um einen Motor der an 6V läuft.Es ist eine ganz einfache Steuerung/schaltung die hald 6V an den Motor anlegt und je nach Richtung umpolt.
Die Steuerung bringt hald nur mitsich dass das Fahrgestell bis zum Anschlag eingefahren werden muss bevor es wieder ausgefahren werden kann. Die RC Steuersignale gehen nur auf die RC Schalter(Fertigteile)
Wenn ich aus dem Urlaub zurück bin stelle ich die Schaltung rein.
Gruss
Christian
hey,
bei mir klappts jetzt auch. es war zwar alles nur als versuchsaufbau und test ges´dacht, aber mit ordentlich starken servos mit metallgetriebe und 18kg auf 1cm servohorn klappt es sogar, dass die servos im eingfahrenen zustand (flugbetrieb) nicht regeln. das getriebe ist so träge,dass keine ströme fließen musssen um die landebeine oben zu halten.
einen harten aufsetzer hatte ich auch schon, es hällt alles prima, obwohl es ja anfangs nur als test gestell gedacht war.
http://vimeo.com/77789609
liebe grüße
rené




bei mir klappts jetzt auch. es war zwar alles nur als versuchsaufbau und test ges´dacht, aber mit ordentlich starken servos mit metallgetriebe und 18kg auf 1cm servohorn klappt es sogar, dass die servos im eingfahrenen zustand (flugbetrieb) nicht regeln. das getriebe ist so träge,dass keine ströme fließen musssen um die landebeine oben zu halten.
einen harten aufsetzer hatte ich auch schon, es hällt alles prima, obwohl es ja anfangs nur als test gestell gedacht war.
http://vimeo.com/77789609
liebe grüße
rené
Hier hat auch noch einer was gebastelt: http://www.rcgroups.com/forums/showthread.php?t=1658259#post21698225
Bzw. hat jemand die Datei zum Nachdrucken?
Hallo René,
Super dass du das bestätigen konntest mit dem Servo und dem Strom ziehen.
Für meinen Schweren Hexa (>5kg) kommt dieses direkte anbringen an einem Servo glaube ich leider nicht in Frage. Ich würde dem Ruderhorn nicht so sehr trauen.
Gruss
Christian
Super dass du das bestätigen konntest mit dem Servo und dem Strom ziehen.
Für meinen Schweren Hexa (>5kg) kommt dieses direkte anbringen an einem Servo glaube ich leider nicht in Frage. Ich würde dem Ruderhorn nicht so sehr trauen.
Gruss
Christian
hey,
ok da hast du recht bei 5 kg könnte das wirklich ein bisschen heftig werden.
die servos haben 18kg/cm
der copter wiegt 1,7kg
die beine am servo sind 13 cm lang
________________________________
18/13=1,38 (pro servo)
also dürfte der copter bei der länge der beine und der stärke der sevos maximal 2,7 Kg wiegen.
das ist allerdings auf die ungünstigste servostellung bezogen. Wenn die servos nämlich ausgefahren sind, stehen sie ja fast 90° zum boden und sind dadurch dementsprechend entlastet. in diesem zustand müsste man sie eigentlich um ein vielfaches belasten können. das läst sich aber meiner meinung nach nicht berechnen, sondern nur ausprobieren.
gekostet hat alles so um die 50€ (10€servohörner,20€ servos,20€ altes landegestell)
liebe grüße
rené
- Status
- Nicht offen für weitere Antworten.

