
4ESC by Martinez max. 6S
- Themenstarter martinez
- Beginndatum
- Status
- Nicht offen für weitere Antworten.


In deim Zusammenhang, eine Firmware die über eine GUI eventuell über Uart oder I2C in Real Time das Timing, Drehrichtung, Aktiv freilauf usw. verstellen kann wäre echt eine Bereicherung auf dem Prüfstand!
@imcoref wenn Du also "schon dabei" bist...
@imcoref wenn Du also "schon dabei" bist...
aber das überschreitet im Augenblick meinen zeitlichen Rahmen, auch wenn es eine super Idee ist.
Sven
Hier mal ne kleine vorschau, werde sie am WE drucken wenn jemand etwas mit eigenem namen oder so will ? ^^

Mein Temperatur Sensor ist unterwegs und ich denke am Wochenende kann ich dann verlässliche Log Daten mit verschiedenen Lasten liefern. Stottern konnte ich bei meinen Motoren auch bei Vollgas nicht beobachten...
siehe oben, Kondensatoren dran gelötet.
Ich bereite gerade den Octo dafür vor.
Was soll ich machen?
Ich bereite gerade den Octo dafür vor.
Was soll ich machen?
Was du machen sollst.
Ich denke du kennst du ganz gut aus, was man mit einer Neuentwicklung so macht.
Gerne kannst du auch Vergleiche auf in Motorprüfstand bzgl. deiner "alten" ESC machen.
Auf jeden Fall sollte jeder erst einmal sehr vorsichtig mit sein teuern Copter umgehen!
Testet die Motoren erst einmal am Boden.
Das programmierte File ist mit "aktiven Freilauf", was ein sehr schnelles reagieren des Motors bedeutet.
Bedenkt das bei eurer FC PID Regelung.
Je kleiner der Propeller desto schneller werden die Drehzahländerungen umgesetzt.
Wenn es der Copter zu lässt macht einen "Handtest" am Boden.
Ist das Gehäuse wärme-ableitend? Sonst würde ich meine Regler nicht gegen Kälte schützen wollen
Mein Temperatur Sensor ist unterwegs und ich denke am Wochenende kann ich dann verlässliche Log Daten mit verschiedenen Lasten liefern. Stottern konnte ich bei meinen Motoren auch bei Vollgas nicht beobachten...
Mein Temperatur Sensor ist unterwegs und ich denke am Wochenende kann ich dann verlässliche Log Daten mit verschiedenen Lasten liefern. Stottern konnte ich bei meinen Motoren auch bei Vollgas nicht beobachten...
Schön zu hören, dass deine Motoren gut laufen.
Deine Messwerte werden bestimmt helfen.
Es wäre sehr gut, wenn alle Tester ein paar Daten zu den verwendeten Komponenten auslisten.
z.B. so:
Copterart: X8
Akku: 6S1P 5000mAh
Motor: MN3508 380kv
Propeller: 14x5
Flightcontroller: Naza V2
Abfluggewicht: 3kg
Sonstiges: Gimbal + FPV Onboard
Viele Grüße
Martinez
Habe gerade mal die compOFF-Firmware getestet - keine Verbesserung feststellbar. Das Stottern klingt jetzt anders und ist eher noch etwas schlimmer (Drehzahl bricht weiter bzw. für längere Zeit ein). Lediglich das Gaswegnehmen hängt jetzt erwartungsgemäß nicht mehr so stark am Knüppel.
Die Timing-Versuche werde ich am Wocheende mal angehen.
Übrigens: das KK-Flashtool funktioniert bei mir nicht, es spuckt stattdessen beim Verify Timeouts. Zum Glück ging es direkt mit avrdude. Das Problem würde ich also eher auf kk-Tool-Seite sehen.
Die Timing-Versuche werde ich am Wocheende mal angehen.
Übrigens: das KK-Flashtool funktioniert bei mir nicht, es spuckt stattdessen beim Verify Timeouts. Zum Glück ging es direkt mit avrdude. Das Problem würde ich also eher auf kk-Tool-Seite sehen.
Übrigens: das KK-Flashtool funktioniert bei mir nicht, es spuckt stattdessen beim Verify Timeouts. Zum Glück ging es direkt mit avrdude. Das Problem würde ich also eher auf kk-Tool-Seite sehen.
Dann kann ich das abstellen.
Gruß Christian
Habe gerade nochmal auf den Schaltplan geschaut: wozu ist eigentlich der 1µF-Kondensator an der Phase gut (C4-C6)? Kann das sein, dass der das Sensing etwas durcheinder bringt? Was für Folgen hätte das, den mal wegzunehmen?
http://ww1.microchip.com/downloads/en/DeviceDoc/22201B.pdf
Habe gerade nochmal auf den Schaltplan geschaut: wozu ist eigentlich der 1µF-Kondensator an der Phase gut (C4-C6)? Kann das sein, dass der das Sensing etwas durcheinder bringt? Was für Folgen hätte das, den mal wegzunehmen?
Den braucht der Treiber für die Ladepumpe.
http://ww1.microchip.com/downloads/en/DeviceDoc/22201B.pdf
http://ww1.microchip.com/downloads/en/DeviceDoc/22201B.pdf
Richtig, ohne die Kondis funktionieren die Treiber nicht. Das ist nicht das Problem.
Es ist wohl eine Frage des Timings.
Das bekommen wir hin!
Gruß
Martinez
Richtig, ohne die Kondis funktionieren die Treiber nicht.
Es ist wohl eine Frage des Timings.
Ich kann mir nicht so richtig vorstellen, wieso eine andere Reglerplatine (mehr ist es ja im Prinzip nicht) da eine Änderung im Timing verlangt. Die Software ist ja exakt die Gleiche, und der Motor inkl. Akku und Prop ebenfalls.
was sind das für RCT-ESC, die Du da vorher hattest?
hast Du mal n Bild der Platine, ne Bezeichung, irgendwas?
Temperatur Kurve
Ich habe jetzt den Temperatursensor verbaut und mal kurz getestet, der Kopter war im Keller festgeschnallt und im manual mode Gas gegeben, erst 20A dann 30A Gesamtstrom.
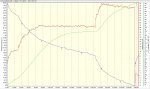
Motoren: T-Motor MN 3508-29
Props: 15x5,5
Akku: 5S, 5800
Regler temperatur war noch im grünen Bereich aber es roch schon verdächtig warm, einer der Motoren war deutlich überbelastet, dann habe ich den Test abgebrochen.
Werde morgen das ganze im Flug testen.
Ich habe jetzt den Temperatursensor verbaut und mal kurz getestet, der Kopter war im Keller festgeschnallt und im manual mode Gas gegeben, erst 20A dann 30A Gesamtstrom.
Motoren: T-Motor MN 3508-29
Props: 15x5,5
Akku: 5S, 5800
Regler temperatur war noch im grünen Bereich aber es roch schon verdächtig warm, einer der Motoren war deutlich überbelastet, dann habe ich den Test abgebrochen.
Werde morgen das ganze im Flug testen.
So, habe mal eine kleine Testserie gemacht. Dank Bootloader ist das Programmieren ja wirklich sehr komfortabel. Leider ohne substanziellen Fortschritt.
Irgendwie habe ich das Gefühl, als ob ein negativer Offset zusammen mit etwas mehr Advance helfen würde...
Und noch was: die FETs blieben bei den ganzen Stalls absolut kalt, der Motor hingegen leicht am Stinken...
Meine bisherigen ESCs: HVSK-40A. Platinenfoto ist leider nicht so einfach, da als "4 Lagen für Arme" gefertigt, sprich zwei gestapelte Platinen, fest verlötet.
Code:
adv offset
18 0 Standard, rauh bei schnellem Beschleuigen im unteren Bereich, Stall im oberen
15 0 kein Unterschied
12 0 wird unten immer rauher
10 0 Probleme bei wenig Gas
10 25 wieder besser
8 25 kein Unterscheid
4 25 etwas besser
0 50 bisher beste Einstellung, aber trotzdem Stall bei ca. 75% Gas
0 100 nicht mehr als Halbgas möglich, totaler Stall
20 0 unklar
22 0 Vollgas wird schlechter
25 0 Vollgas auch extrem langsam kaum noch erreichbar
25 25 Mehr als 30% Gas nicht möglichUnd noch was: die FETs blieben bei den ganzen Stalls absolut kalt, der Motor hingegen leicht am Stinken...
Meine bisherigen ESCs: HVSK-40A. Platinenfoto ist leider nicht so einfach, da als "4 Lagen für Arme" gefertigt, sprich zwei gestapelte Platinen, fest verlötet.
Zuletzt bearbeitet:
ich habe noch mal ein bisschen rum gesucht und in einem anderen Forum etwas gefunden, wo manche Probleme mit Multistar Motoren mit hoher Polzahl hatten.
Die schreiben, sie hätten noch mit dieser Änderung Erfolg gehabt:
<EDIT:>
ich sehe gerade, dass Du das auch in die XX.inc einsetzen kannst und nicht im tgy.asm Änderungen vornehmen musst
</EDIT>
in "tgy.asm"
.equ POWER_RANGE = 1600 * CPU_MHZ / 16 + MIN_DUTY
in "XX.inc"
.equ MOTOR_ADVANCE = 25
Ist nur ein Vorschlag!
Die schreiben, sie hätten noch mit dieser Änderung Erfolg gehabt:
<EDIT:>
ich sehe gerade, dass Du das auch in die XX.inc einsetzen kannst und nicht im tgy.asm Änderungen vornehmen musst
</EDIT>
in "tgy.asm"
.equ POWER_RANGE = 1600 * CPU_MHZ / 16 + MIN_DUTY
in "XX.inc"
.equ MOTOR_ADVANCE = 25
Ist nur ein Vorschlag!
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

