
TauLabs: GPS Funktionen
- Themenstarter cGiesen
- Beginndatum
In den Settings muss bei Homelocation.Set=FALSE stehen. Dann übernimmt der Home mit dem ersten 3D Fix nach dem Einschalten.
Jetzt will ich das gerade testen und beokmme ums Verreckn keinen Fix

Wieso vergisst das blöde GPS eigentlich immer die Satelliten?
Wenn er ein mal einen fix hatte, dann findet er den beim Anstecken des nächsten akkus direkt wieder, aber der erste durchlauf dauert manchmal ewig.
VG
Eben habe ich mal nach einer ordentlichen 6-Achsen Kalibierung PH getestet und man kann schon sagen, dass das zufriedenstellend funktioniert! Trotz wind hat er ganz ordentlich die Position gehalte.
Was allerdings noch nicht so recht funktioniert, ist das AltHold.
Da regelt er irgendwie "hektisch". Genau genommen hält er schon irgendwie die Höhe, aber das ganze macht einen sehr unruhigen Eindruck.
Kann mir jemand sagen, wie ich das Thema PIDs für AltHold angehe?
Ich habe ein bisschen rumgespielt, aber ich konnte keine signifikante Verbesserung erzielen.
VG
Was allerdings noch nicht so recht funktioniert, ist das AltHold.
Da regelt er irgendwie "hektisch". Genau genommen hält er schon irgendwie die Höhe, aber das ganze macht einen sehr unruhigen Eindruck.
Kann mir jemand sagen, wie ich das Thema PIDs für AltHold angehe?
Ich habe ein bisschen rumgespielt, aber ich konnte keine signifikante Verbesserung erzielen.
VG
Ich habe es zwar noch nicht gemacht, aber ich würde so vorgehen:
1. I=0,D=0, Speed auf max 4m/s.
2. dann schrittweise P erhöhen, bis er schwingt.
3. P wieder etwas zurück und I=P.
4. schließlich D etwas erhöhen. Muss aber nicht sein.
1. I=0,D=0, Speed auf max 4m/s.
2. dann schrittweise P erhöhen, bis er schwingt.
3. P wieder etwas zurück und I=P.
4. schließlich D etwas erhöhen. Muss aber nicht sein.
Gibt ja nur P und I in dem Reiter (kann mich aber auch gerade irren, habe gerade keinen Zugriff drauf)
Dann teste ich nachher mal weiter
Ungefähr so habe ich ja auch schon angefangen, aber leider war das noch nicht so richtig erfolgreich. Interessant wäre es, mal Referenzwerte zu haben.
VG
Also meine Einstellungen sind wie folgt für Altitude Hold:
er hält in einem Bereich von ca +- einem Meter die Höhe. Aber! Es ist ganz entscheidend was für ein Schaumstoff du verwendest und wie böhig der Wind ist.
Bei Windstille in der Garage klappt es perfekt. Bei Sonnenschein und böhigem Wind schwankt er schon mehr.
Bei mir hat es mit einem schwarzen dichtem Schaumstoff am besten funktioniert. Normaler Matratzenschaumstoff (gelb) war nicht so toll. Der Baro reagiert extrem auf Licht.
Hier mal ein Video von mir:
http://www.youtube.com/watch?v=hZN-2uh7yFI
Dämmerung und Windstille.
- PositionKP: 2m/s
- Velocity KP: 0,3
- Velocity KI: 0,3
- Attitude Comp: true
- max Rate: 2m/s
- Expo: 40
er hält in einem Bereich von ca +- einem Meter die Höhe. Aber! Es ist ganz entscheidend was für ein Schaumstoff du verwendest und wie böhig der Wind ist.
Bei Windstille in der Garage klappt es perfekt. Bei Sonnenschein und böhigem Wind schwankt er schon mehr.
Bei mir hat es mit einem schwarzen dichtem Schaumstoff am besten funktioniert. Normaler Matratzenschaumstoff (gelb) war nicht so toll. Der Baro reagiert extrem auf Licht.
Hier mal ein Video von mir:
http://www.youtube.com/watch?v=hZN-2uh7yFI
Dämmerung und Windstille.
Zuletzt bearbeitet:
Also meine Einstellungen sind wie folgt für Altitude Hold:
er hält in einem Bereich von ca +- einem Meter die Höhe. Aber! Es ist ganz entscheidend was für ein Schaumstoff du verwendest und wie böhig der Wind ist.
Bei Windstille in der Garage klappt es perfekt. Bei Sonnenschein und böhigem Wind schwankt er schon mehr.
Bei mir hat es mit einem schwarzen dichtem Schaumstoff am besten funktioniert. Normaler Matratzenschaumstoff (gelb) war nicht so toll. Der Baro reagiert extrem auf Licht.
Hier mal ein Video von mir:
http://www.youtube.com/watch?v=hZN-2uh7yFI
Dämmerung und Windstille.
- PositionKP: 2m/s
- Velocity KP: 0,3
- Velocity KI: 0,3
- Attitude Comp: true
- max Rate: 2m/s
- Expo: 40
er hält in einem Bereich von ca +- einem Meter die Höhe. Aber! Es ist ganz entscheidend was für ein Schaumstoff du verwendest und wie böhig der Wind ist.
Bei Windstille in der Garage klappt es perfekt. Bei Sonnenschein und böhigem Wind schwankt er schon mehr.
Bei mir hat es mit einem schwarzen dichtem Schaumstoff am besten funktioniert. Normaler Matratzenschaumstoff (gelb) war nicht so toll. Der Baro reagiert extrem auf Licht.
Hier mal ein Video von mir:
http://www.youtube.com/watch?v=hZN-2uh7yFI
Dämmerung und Windstille.
Sonnenlicht bekommt der Sensor nicht direkt ab, weil der Q mitten im Frame sitzt. Aber der Schaumstoff ist in der Tat noch mal ein Punkt, den man austesten könnte.
VG und Danke!
Hatte zwar nur wenig Zeit zum testen, aber mittlerweile muss ich sagen, dass er ziemlich gut die Höhe hält. Was noch nicht so richtig perfekt ist, ist der PH. Da steuert er ab und an mal relativ hektisch nach, aber auch da würde ich sagen, dass er nach der 6-Punkt Kalibrierung auf 1-2m genau die Postion hält (danke für den Tip mit der Kalibrierung!)
Jetzt habe ich aber noch ein Problem offen, wo ich nicht hinter komme. Und zwar die Home Position anzeige im minimOSD.
Die GPS Koords passen, die HP wird auch ordentlich gesetzt (in der GUI Kontrolliert), aber der HomePosition Pfeil bewegt sich nicht.
Er bewegt sich auch nicht in die falsche Richtung, sondern er bewegt sich einfach gar nicht.
Kann/muss man da noch was einstellen?
VG
Jetzt habe ich aber noch ein Problem offen, wo ich nicht hinter komme. Und zwar die Home Position anzeige im minimOSD.
Die GPS Koords passen, die HP wird auch ordentlich gesetzt (in der GUI Kontrolliert), aber der HomePosition Pfeil bewegt sich nicht.
Er bewegt sich auch nicht in die falsche Richtung, sondern er bewegt sich einfach gar nicht.
Kann/muss man da noch was einstellen?
VG
das freut mich, dass es bei dir soweit funktioniert
Zum MinimOSD kann ich nicht viel sagen. Ich hab die Firmware geflashed und alles angeschlossen und schon hats funktioniert
Nur leider bekomm ich beim Gasgeben, OSD aussetzer. ich Vermute hier aber Störungen. Wenn mein neuer Rahmen fertig ist und ordentlich fliegt, werde ich mir das dann nochmal genauer anschauen.
Was ich aber weis, und vielleicht hilft dir das schon, es gibt eine extra Firmware für Taulabs.
Worin der Unterschied ist, weis ich allerdings nicht. Rein optisch sind beide gleich.
Anbei der Link zum Wiki von Taulabs.
und der Link zum OSD Firmware.
Zum MinimOSD kann ich nicht viel sagen. Ich hab die Firmware geflashed und alles angeschlossen und schon hats funktioniert
Nur leider bekomm ich beim Gasgeben, OSD aussetzer. ich Vermute hier aber Störungen. Wenn mein neuer Rahmen fertig ist und ordentlich fliegt, werde ich mir das dann nochmal genauer anschauen.
Was ich aber weis, und vielleicht hilft dir das schon, es gibt eine extra Firmware für Taulabs.
Worin der Unterschied ist, weis ich allerdings nicht. Rein optisch sind beide gleich.
Anbei der Link zum Wiki von Taulabs.
und der Link zum OSD Firmware.
das freut mich, dass es bei dir soweit funktioniert
Zum MinimOSD kann ich nicht viel sagen. Ich hab die Firmware geflashed und alles angeschlossen und schon hats funktioniert
Nur leider bekomm ich beim Gasgeben, OSD aussetzer. ich Vermute hier aber Störungen. Wenn mein neuer Rahmen fertig ist und ordentlich fliegt, werde ich mir das dann nochmal genauer anschauen.
Was ich aber weis, und vielleicht hilft dir das schon, es gibt eine extra Firmware für Taulabs.
Worin der Unterschied ist, weis ich allerdings nicht. Rein optisch sind beide gleich.
Anbei der Link zum Wiki von Taulabs.
und der Link zum OSD Firmware.
Zum MinimOSD kann ich nicht viel sagen. Ich hab die Firmware geflashed und alles angeschlossen und schon hats funktioniert
Nur leider bekomm ich beim Gasgeben, OSD aussetzer. ich Vermute hier aber Störungen. Wenn mein neuer Rahmen fertig ist und ordentlich fliegt, werde ich mir das dann nochmal genauer anschauen.
Was ich aber weis, und vielleicht hilft dir das schon, es gibt eine extra Firmware für Taulabs.
Worin der Unterschied ist, weis ich allerdings nicht. Rein optisch sind beide gleich.
Anbei der Link zum Wiki von Taulabs.
und der Link zum OSD Firmware.
Ich bin der Meinung, dass ich genau das genommen habe. Ich kann mich aber auch irren, weil ich zwischendrin mal was anderes ausprobiert habe, da ich Darstellungsprobleme hatte, aber vllt ist das schon das Problem.
Ich werde die Tage einfach nochmal die SW aufspielen und schauen, ob sich dann was tut.
Ich hatte auch Störungen, solange ich das minimOSD über den Quanton mit 5V versorgt habe.
Seit ich nen 5V BEC extra für's minimOSD genommen habe, ist das Bild super!
VG
Hey,
Habe ein etwas anderes Problem mit meiner GPS Konfiguration. Bin etwas fremd dieser art und weise der Programmierung gegenüber.
Das GPS Modul ist ein Ublox Neo 6m
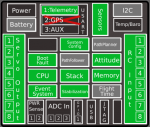
Systemstatus (Anhang1)
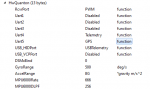
Module settings (Anhang2) (ich hatte es schon kurz soweit dass der GPS sensor erkannt wurde jedoch war das fliegen danach unmöglich. habe den Ausgangszustand wieder hergestellt und nur GPS aktiviert)
UART Settings (Anhang3)
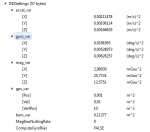
INS settings (Anhang4) daran habe ich nichts verändert.
was mache ich falsch? das GPS modul wurde vorhin kurz erkannt. habe nur die Baudrate eingestellt und das GPS modul aktiviert.
Gruß
Sven
Habe ein etwas anderes Problem mit meiner GPS Konfiguration. Bin etwas fremd dieser art und weise der Programmierung gegenüber.
Das GPS Modul ist ein Ublox Neo 6m
Systemstatus (Anhang1)
Module settings (Anhang2) (ich hatte es schon kurz soweit dass der GPS sensor erkannt wurde jedoch war das fliegen danach unmöglich. habe den Ausgangszustand wieder hergestellt und nur GPS aktiviert)
UART Settings (Anhang3)
INS settings (Anhang4) daran habe ich nichts verändert.
was mache ich falsch? das GPS modul wurde vorhin kurz erkannt. habe nur die Baudrate eingestellt und das GPS modul aktiviert.
Gruß
Sven
Anhänge
-
 17,5 KB Aufrufe: 13
17,5 KB Aufrufe: 13 -
 40,1 KB Aufrufe: 14
40,1 KB Aufrufe: 14 -
 10,4 KB Aufrufe: 14
10,4 KB Aufrufe: 14 -
 13,9 KB Aufrufe: 13
13,9 KB Aufrufe: 13
ok der Fehler besteht jedoch trotzdem auch bei Rücksetzen von INS
Nur Kurz noch die Anmerkung das Modul ist richtig verkabelt und die Status LED blinkt. So wie ich das verstehe müsste ich doch um die GPS daten zu bekommen nur das GPS Modul aktivieren sonst dürfte keine weitere einstellung nötig sein. Solange ich nichts damit ansteuern möchte oder?
Nur Kurz noch die Anmerkung das Modul ist richtig verkabelt und die Status LED blinkt. So wie ich das verstehe müsste ich doch um die GPS daten zu bekommen nur das GPS Modul aktivieren sonst dürfte keine weitere einstellung nötig sein. Solange ich nichts damit ansteuern möchte oder?
ok der Fehler besteht jedoch trotzdem auch bei Rücksetzen von INS
Nur Kurz noch die Anmerkung das Modul ist richtig verkabelt und die Status LED blinkt. So wie ich das verstehe müsste ich doch um die GPS daten zu bekommen nur das GPS Modul aktivieren sonst dürfte keine weitere einstellung nötig sein. Solange ich nichts damit ansteuern möchte oder?
Nur Kurz noch die Anmerkung das Modul ist richtig verkabelt und die Status LED blinkt. So wie ich das verstehe müsste ich doch um die GPS daten zu bekommen nur das GPS Modul aktivieren sonst dürfte keine weitere einstellung nötig sein. Solange ich nichts damit ansteuern möchte oder?
Seit einiger Zeit kann man die Module über den Reiter "Modules" zuschalten.
Anhang anzeigen 103126
Die markierten Module sind die, die Du für GPS benötigst.
Hier gibt es noch eine sehr gute Anleitung (ich würde die manuelle Konfiguration bevorzugen, da ich den Config File nicht auf alle Module hochladen konnte, die manuelle Config aber bei allen funktioniert hat):
https://github.com/TauLabs/TauLabs/wiki/Ublox-GPS-Configuration-for-Tau-Labs-FC
Und wie oben schon beschrieben, kann es auch ein paar Minuten dauern, bis das GPS 7 Sats hat. Und erst dann kannst Du die MOtoren starten.
Und in Deinem Screenshot ist das AltHold Modul nicht aktiv.
Und weiter gibt dir die GCS eigentlich einen Hinweis darauf, wo das Problem liegt. Unten im Footer der GCS solltest Du ein gelbes Dreick sehen, welches beim Mouseover sagt, welche Module problematisch sind. Gleiches mit dem roten Kreis.
Und wenn Du in der Modulübersicht (das Bild, was Du gepostet hast), auf das GPS Modul clickst, dann bekommst Du nochmal explizit informationen zum Modul.
Hast Du denn überhaupt den Akku dran gehabt? Das GPS Modul startet nur, wenn der Akku dran ist.
VG
seit gestern abend benutz ich die neuste software und auch die neue "Master" firmware zum fliegen. hatte vorher die "Jenkins next" drauf.
Ja AltHold war nicht aktiv. Die restlichen benötigten Module auch nicht.
Ok dann schau ich mal nach der Anleitung danke
Es funktioniert jetzt dann auch soweit jedoch schaukelt der Copter ziemlich hin und her.
Akku war dran der gibt ja die Stromversorgung für das GPS Modul.
Gruß
Sven
Ja AltHold war nicht aktiv. Die restlichen benötigten Module auch nicht.
Ok dann schau ich mal nach der Anleitung danke
Es funktioniert jetzt dann auch soweit jedoch schaukelt der Copter ziemlich hin und her.
Akku war dran der gibt ja die Stromversorgung für das GPS Modul.
Gruß
Sven
seit gestern abend benutz ich die neuste software und auch die neue "Master" firmware zum fliegen. hatte vorher die "Jenkins next" drauf.
Ja AltHold war nicht aktiv. Die restlichen benötigten Module auch nicht.
Ok dann schau ich mal nach der Anleitung danke
Es funktioniert jetzt dann auch soweit jedoch schaukelt der Copter ziemlich hin und her.
Akku war dran der gibt ja die Stromversorgung für das GPS Modul.
Gruß
Sven
Ja AltHold war nicht aktiv. Die restlichen benötigten Module auch nicht.
Ok dann schau ich mal nach der Anleitung danke
Es funktioniert jetzt dann auch soweit jedoch schaukelt der Copter ziemlich hin und her.
Akku war dran der gibt ja die Stromversorgung für das GPS Modul.
Gruß
Sven
VG
Eig wollt ich GPS und PH als excitement haben..... nach erneuter 6 achsen Kalibrierung(Bevor ich GPS drauf hatte hatte ich die auch schon gemacht flog wunderbar) kippte der Copter bei PH nach links und ab in den Acker.... ich sehe du bist vom Eyefly Support mein Quadrixette hat wunderbar überlebt. Tausche jetzt den Kaputten Rotor und dann mal schauen.... ich lad mal die Einstellungen Hoch vielleicht seht ihr ja da direkt noch einen Fehler
Gruß
Sven
Gruß
Sven
Hier die Datei gewollt wäre eig. nur dass er in der Luft stehen bleibt also auch mit Throttle Control. wenn ich bei den Filtern was einstelle (daher der Absturz) ist die Lage dese Copters immer! auch nach neuer Kalibrierung in schieflage. das versteh ich nicht.
https://www.dropbox.com/s/ybqm88l1r9hg1u2/quadrixette.uav?dl=0
hier der Dropbox link dazu
https://www.dropbox.com/s/ybqm88l1r9hg1u2/quadrixette.uav?dl=0
hier der Dropbox link dazu

