
Aerodynamik für RaceCopter
- Themenstarter maulwurfpauli
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Ja ist mein ernst, der Black Bullet sieht deutlich anders aus als der Hornet der momentan dort leider nicht zu finden ist.
Da ich ihn aber Persönlich kenne kann ich dir versichern das er gut ist und ja man es ist ein tilt frame nur ist das nicht so offensichtlich.
Die Hornet gefällt mir optisch auch nicht, technisch ist sie aber richtig gut.
Da ich ihn aber Persönlich kenne kann ich dir versichern das er gut ist und ja man es ist ein tilt frame nur ist das nicht so offensichtlich.
Die Hornet gefällt mir optisch auch nicht, technisch ist sie aber richtig gut.
die yaw-drehung bei coptern wird ja über drehzahlunterschiede zwischen cw- und cww-motoren erzeugt die durch das veränderte drehmoment den copter zum gieren bewegen. mit zunehmender anwinkelung der motoren wird dieser einfluss auf die yaw-achse immer geringer, im theoretischen extremfall von 90° motorstellung hätten drehzahlunterschiede überhaupt keinen einfluss mehr auf das gieren.
Jetzt ist es soweit, musste die Restekiste nach geeigneten Materialien durchsuchen um mal schnell einen Frame zu bauen:
sowas schwebt mir vor:

hier der erste Prototyp (noch nicht viel dran, aber wird noch)


Also ich hab kein Problem mit versetzten Propellerebenen und technisch eine + Anordnung ist es auch. Wäre auch relativ leicht als Aluframe mit wenigen Frästeilen zu bewerkstelligen, aber ohne Fräse würde das schneiden Stunden dauern. Der Mittelteil bietet genug Platz für 2x 3S3300 hinter der FC VTX und Empfänger, ganz vorne die Kamera. Mittelteil wird auch verkleidet (Folie). Der Copter wäre also komplett geschlossen. ESC hab ich immer gerne an den Auslegern wegen der Kühlung.
Gleich vorweg ich bin so ein Frame schon mal geflogen (war noch mit der GU344), fliegt sich als Kopter ganz normal, hab das aber leider nicht gefilmt oder fotografiert (schon ewig lange her, war mein erstes selbstgebautes und entworfenes Frame)
lg Ferdl
sowas schwebt mir vor:
hier der erste Prototyp (noch nicht viel dran, aber wird noch)
Also ich hab kein Problem mit versetzten Propellerebenen und technisch eine + Anordnung ist es auch. Wäre auch relativ leicht als Aluframe mit wenigen Frästeilen zu bewerkstelligen, aber ohne Fräse würde das schneiden Stunden dauern. Der Mittelteil bietet genug Platz für 2x 3S3300 hinter der FC VTX und Empfänger, ganz vorne die Kamera. Mittelteil wird auch verkleidet (Folie). Der Copter wäre also komplett geschlossen. ESC hab ich immer gerne an den Auslegern wegen der Kühlung.
Gleich vorweg ich bin so ein Frame schon mal geflogen (war noch mit der GU344), fliegt sich als Kopter ganz normal, hab das aber leider nicht gefilmt oder fotografiert (schon ewig lange her, war mein erstes selbstgebautes und entworfenes Frame)
lg Ferdl
Ich dachte im ersten Moment eher an eine klassische X-Form, nur halt vertikal aufgebaut. Problem ist halt ne stabile Kreuzverbindung. Das funktioniert vermutlich nur durch laminieren, selbst wenn statt den vier Rotorblättern nur zwei CFK Streifen überkreuz zusammen steckt werden. Als Kreuzverbindung würde eventuell auch ne Raute Sinn machen. So ein vertikaler Aufbau würde natürlich genauso bei einem H-Frame funktionieren. Vieleicht sogar verschraubbar, da man ja nur zwei T-Verbindungen braucht(Grundplatte eventuell auch vertikal).
ESC's könnten zentral mit an die Kreuzverbindung. Motorkabel verlaufen in den vertikalen Armen, oder man klebt Kupferstreifen direkt auf die Arme. Als Motorgondel soll ein Stück T-Profil aus Alu oder CFK dienen, was einfach in den geschlitzten Arm geklebt oder geschraubt wird.
Gibt es solche Versuche schon irgendwo im Netz? Mich würden vor allen die Flugeigenschaften und Möglichkeiten einer Kreuzverbindungen(oder T-Verbindung) interessieren.
Anhänge
-
 111,2 KB Aufrufe: 61
111,2 KB Aufrufe: 61
Framebauart ist nur CFK-Rohr / Stab Lochbohr Superkleber Bauart, nix besonderes. Wird auch kein 5kg Copter sondern eher <1kg, also das reicht sicher.
Zu den Kreuzverbindungen, wenn mit CA fixiert und dann mit CFK-Band darüberlaminiert hält das bombenfest.
Über die Flugeigenschaften werde ich berichten, aber wie schon zuvor geschrieben, im Schnellflug kann man sich auch durch Ruder helfen.
lg Ferdl
Zu den Kreuzverbindungen, wenn mit CA fixiert und dann mit CFK-Band darüberlaminiert hält das bombenfest.
Über die Flugeigenschaften werde ich berichten, aber wie schon zuvor geschrieben, im Schnellflug kann man sich auch durch Ruder helfen.
lg Ferdl
Zitat von schnellmaleben
Na leicht, das können wir:
411g abflugfertig mit 4S, ok ein halber Prop fehlt gerade
- Renngetestet, inzwischen gegen Metall & andere harte Sachen
- 1A Flugeigenschaften, fast eine Propellerebene
- mit HDcam (wer mag...), ca. 38°, FPV-Cam ca. 30°
- geringste Frontalfläche bei 35° Neigung (weniger macht meiner Meinung nach keinen Sinn, eher noch mehr)
toll, das ergebniss kann sich echt sehen lassen und sieht nach konsequentem leichtbau aus!
und mit den winkeln sind wir uns auch einig, bei mir sind es jetzt ebenfalls 30° für die fpv-cam und ca. 35° für die hd-cam (mobius). und richtig, der durchschnittliche anstellwinkel wird zwischen 40 und 50° liegen. daher wäre mir die umsetzung beim block270 deutlich zu zaghaft, bei willas "derbe" scheint es aber sehr gut zu passen.
viele grüße, gerald.
ps: freut mich dass das thema hier so reges interesse findet
Na leicht, das können wir:
411g abflugfertig mit 4S, ok ein halber Prop fehlt gerade
- Renngetestet, inzwischen gegen Metall & andere harte Sachen
- 1A Flugeigenschaften, fast eine Propellerebene
- mit HDcam (wer mag...), ca. 38°, FPV-Cam ca. 30°
- geringste Frontalfläche bei 35° Neigung (weniger macht meiner Meinung nach keinen Sinn, eher noch mehr)
toll, das ergebniss kann sich echt sehen lassen und sieht nach konsequentem leichtbau aus!
und mit den winkeln sind wir uns auch einig, bei mir sind es jetzt ebenfalls 30° für die fpv-cam und ca. 35° für die hd-cam (mobius). und richtig, der durchschnittliche anstellwinkel wird zwischen 40 und 50° liegen. daher wäre mir die umsetzung beim block270 deutlich zu zaghaft, bei willas "derbe" scheint es aber sehr gut zu passen.
viele grüße, gerald.
ps: freut mich dass das thema hier so reges interesse findet
War auch mal Zeit für so ein Thema, ist ja ne entscheidende Sache bei den Geschwindigkeiten.
Hier kommen viele schöne Ideen ans Tageslicht, der Copter von schnellmaleben gefällt mir z.B. super.
Mit den Kamerawinkeln stimme ich euch zu, bei mir hat sich der Winkel auch auf etwas über 30° für die FPV-Cam eingependelt.
Wenn ich das alles hier so sehe juckt mich mein CAD-Bastelfinger den Block 270 auch nochmal zu überarbeiten, mit mehr Winkel und weniger Gewicht
")
...Wenn ich das alles hier so sehe juckt mich mein CAD-Bastelfinger den Block 270 auch nochmal zu überarbeiten, mit mehr Winkel und weniger Gewicht
- größe wie zuvor, also etwa 270-280mm (bei zuviel freizeit gern auch noch eine verkleinerte version für 4" mit etwa 180-190mm)
- rumpf etwa 40° angestellt, propeller dennoch etwa in einer ebene
- der rumpfkasten sollte trotzdem recht schmal und nicht zu hoch werden. die ausleger müssten diesmal also nicht durch den rumpf gehen sondern vorn drunter und hinten oben drüber montiert sein
- ausleger gern wieder paarweise durchgehend (nicht einzeln), zumindest für vorn wegen erhöhter stabilität
- perfekt aber nicht so einfach umzusetzen wären hochkant-ausleger wie beim derbe. einerseits behindern die kaum den abwind der propeller und andererseits wird im vorwärtsflug auftrieb anstatt abtrieb erzeugt. falls das technisch/konstruktiv nur schwer umsetzbar ist die waagerechten ausleger schmal halten (max. 20mm breit).
- bis etwa 40° verstellbare halterung für fpv-cam (gern HS1177 da schön klein und einfache befestigung über seitliche aufnahme- bzw drehpunkte möglich)
-> also insgesamt dem "derbe" schon recht ähnlich und wenn das framegewicht am ende nicht über 150gramm kommt wäre das schon recht gut. noch weniger ist bei so einer konstruktion wohl schwierig möglich wenn man auf sandwichmaterial verzichtet.
viele grüße, gerald.
oh ja, bitte! und wenn wir hier bei "wünsch dir was" sind wären das meine punkte:
- größe wie zuvor, also etwa 270-280mm (bei zuviel freizeit gern auch noch eine verkleinerte version für 4" mit etwa 180-190mm)
- rumpf etwa 40° angestellt, propeller dennoch etwa in einer ebene
- der rumpfkasten sollte trotzdem recht schmal und nicht zu hoch werden. die ausleger müssten diesmal also nicht durch den rumpf gehen sondern vorn drunter und hinten oben drüber montiert sein
- ausleger gern wieder paarweise durchgehend (nicht einzeln), zumindest für vorn wegen erhöhter stabilität
- perfekt aber nicht so einfach umzusetzen wären hochkant-ausleger wie beim derbe. einerseits behindern die kaum den abwind der propeller und andererseits wird im vorwärtsflug auftrieb anstatt abtrieb erzeugt. falls das technisch/konstruktiv nur schwer umsetzbar ist die waagerechten ausleger schmal halten (max. 20mm breit).
- bis etwa 40° verstellbare halterung für fpv-cam (gern HS1177 da schön klein und einfache befestigung über seitliche aufnahme- bzw drehpunkte möglich)
-> also insgesamt dem "derbe" schon recht ähnlich und wenn das framegewicht am ende nicht über 150gramm kommt wäre das schon recht gut. noch weniger ist bei so einer konstruktion wohl schwierig möglich wenn man auf sandwichmaterial verzichtet.
viele grüße, gerald.
- größe wie zuvor, also etwa 270-280mm (bei zuviel freizeit gern auch noch eine verkleinerte version für 4" mit etwa 180-190mm)
- rumpf etwa 40° angestellt, propeller dennoch etwa in einer ebene
- der rumpfkasten sollte trotzdem recht schmal und nicht zu hoch werden. die ausleger müssten diesmal also nicht durch den rumpf gehen sondern vorn drunter und hinten oben drüber montiert sein
- ausleger gern wieder paarweise durchgehend (nicht einzeln), zumindest für vorn wegen erhöhter stabilität
- perfekt aber nicht so einfach umzusetzen wären hochkant-ausleger wie beim derbe. einerseits behindern die kaum den abwind der propeller und andererseits wird im vorwärtsflug auftrieb anstatt abtrieb erzeugt. falls das technisch/konstruktiv nur schwer umsetzbar ist die waagerechten ausleger schmal halten (max. 20mm breit).
- bis etwa 40° verstellbare halterung für fpv-cam (gern HS1177 da schön klein und einfache befestigung über seitliche aufnahme- bzw drehpunkte möglich)
-> also insgesamt dem "derbe" schon recht ähnlich und wenn das framegewicht am ende nicht über 150gramm kommt wäre das schon recht gut. noch weniger ist bei so einer konstruktion wohl schwierig möglich wenn man auf sandwichmaterial verzichtet.
viele grüße, gerald.
FerdinandK
Wegen der Propellerebenen, man kann auch die vorderen Motoren nach unten und die hinteren Motoren nach oben montieren, dann hat man bei angestelltem Rumpf ebenfalls alle Propeller in einer Ebene.
Wegen der Propellerebenen, man kann auch die vorderen Motoren nach unten und die hinteren Motoren nach oben montieren, dann hat man bei angestelltem Rumpf ebenfalls alle Propeller in einer Ebene.

Auf jeden Fall viele gute Vorschläge von erfahrenen Quad-Bauern, man könnte daraus eine wunderbare Anforderungsliste für einen neuen Race-Quad zusammenstellen.
Vielleicht find ich ja etwas Zeit über den Herbst, ansonsten könnt ihr gern auch die CAD Dateien haben und selber rumbasteln ... einfach kurz melden
genau, so hatte ich es ja auch in meiner wunschliste angedacht...
eine andere idee hatte ich aber heut auch noch: anfangs wollte ich mal einen simplen H-quad mit durchgehenden 12mm cfk-rohren als ausleger nutzen welche in rohrschellen drehbar sind um so den anstellwinkel der motoren einzustellen. in dem fall haben wir allerdings genau das beschriebene gier-problem wenn der winkel zu groß wird...
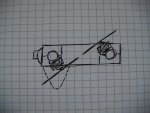
aber man könnte ja auch die vorderen motoren nach unten drehen und die hinteren "normal" lassen. so bekommt einen flachen rumpf ohne zusätzliche aufbauten für die angewinkelte befestigung der ausleger, also aerodynamisch schonmal recht günstig.
nachteil sind die vorderen props welche beim starten und landen zuerst bodenkontakt haben aber eine mittige landekuve würde abhilfe schaffen.
hab das zur verdeutlichung mal kurz skizziert:
...die ausleger müssten diesmal also nicht durch den rumpf gehen sondern vorn drunter und hinten oben drüber montiert sein...
aber man könnte ja auch die vorderen motoren nach unten drehen und die hinteren "normal" lassen. so bekommt einen flachen rumpf ohne zusätzliche aufbauten für die angewinkelte befestigung der ausleger, also aerodynamisch schonmal recht günstig.
nachteil sind die vorderen props welche beim starten und landen zuerst bodenkontakt haben aber eine mittige landekuve würde abhilfe schaffen.
hab das zur verdeutlichung mal kurz skizziert:
Anhänge
-
 547,6 KB Aufrufe: 53
547,6 KB Aufrufe: 53
Egal wie die Motoren angeordnet sind, die FC muss dennoch immer parallel zur Propellerebene sitzen. Mixt man aber an der Funke
30%Seite und 70% Roll auf den Knüppel "Roll", und 70%Seite und 30% Roll auf den Knüppel "Seite", dann merkt man im Flug nix davon. (Die Werte variieren natürlich je nach Anstellwinkel. Hat man eine schwenkbare Cam könnte man das sogar im Mixer berücksichtigen.
lg Ferdl
30%Seite und 70% Roll auf den Knüppel "Roll", und 70%Seite und 30% Roll auf den Knüppel "Seite", dann merkt man im Flug nix davon. (Die Werte variieren natürlich je nach Anstellwinkel. Hat man eine schwenkbare Cam könnte man das sogar im Mixer berücksichtigen.
lg Ferdl
die yaw-drehung bei coptern wird ja über drehzahlunterschiede zwischen cw- und cww-motoren erzeugt die durch das veränderte drehmoment den copter zum gieren bewegen. mit zunehmender anwinkelung der motoren wird dieser einfluss auf die yaw-achse immer geringer, im theoretischen extremfall von 90° motorstellung hätten drehzahlunterschiede überhaupt keinen einfluss mehr auf das gieren.
es gab schon einige versuche mit stark angestellten motoren die meines wissens nach alle wieder eingestellt wurden aus den genannten gründen. für ein sauberes steuer- und regelverhalten sollten die propeller daher in etwa einer ebene liegen.
es gab schon einige versuche mit stark angestellten motoren die meines wissens nach alle wieder eingestellt wurden aus den genannten gründen. für ein sauberes steuer- und regelverhalten sollten die propeller daher in etwa einer ebene liegen.
Wenn ich die Kamera-Längsachse als horizontal annehme (im Vorwärtsflug), dann spielt es doch keine Rolle ob nur die Propeller nach vorne geneigt sind oder die ganze Prop-Ebene. In beiden Fällen könnte ich bei der 90° Stellung der Motoren zur Kamera keine Gierwirkung mehr durch verändern des Drehmoments erreichen. Ich könnte allerdings eine Gierbewegung für die Kamera dadurch ausführen, dass ich den Schub links oder rechts erhöhe, wie das normalerweise beim Rollen gemacht wird. Oder anderst gesagt: bei Stellung 90° ist Gieren Rollen und Rollen Gieren
.Es sollte also vom Gier-Verhalten her keine Rolle spielen ob ich die Ebene neige oder nur die Motoren; in beiden Fällen müsste ich Rollen und Gieren entsprechend dem Neigungswinkel Mischen.
Versuch mal bei 90grad nach vorne gekippten Motoren zu pitchen - dann wird der grundlegende Unterschied der Konzepte klar. Da geht nichts mehr, weil unterschiedliche Drehzahlen vorne/hinten zu - taraaa - addiertem Schub nach hinten werden, sonst nichts, keine Nickkontrolle und damit Regelung mehr möglich.
Gewinkelte Motoren sind einfach Murks weil zwei Wirkachsen (alt:yaw und alt:roll) sich aufeinander zu bewegen und nicht mehr strikt 90° zueinander (orthogonal) sind wie die FC es üblicherweise erwartet. Bei (theoretischer) 90° Kippung der Motoren passiert bei zwei Aktionen dasselbe:
- Unterschiedliches Yaw-Moment => Drehung um alt:Roll
- Unterschiedliche Drehzahlen rechts und links => Drehung um alt:Roll
- Und Pitch fehlt, weil dafür kein Hebel bezogen auf den CoG mehr da ist.
Bei 10-20° Kippung merkt man davon noch nichts, aber trotzdem ist die Flugphysik nicht "sauber", weil die Yaw-Drehachse (immer senkrecht zu den Propellern) und die Roll-Drehachse (gedachte Verbindungsline der vorderen und hinteren Motoren bzw. normale Längsachse) nicht orthogonal sind, sondern nun 70-80° beträgt - die Achsen beeinflussen sich gegenseitig, damit auch die Regelung, die von unabhängigen Achsen ausgeht. Deshalb ist überhaupt spezielle Tilt-Software in der FC vonnöten.
Ab irgend einem Anstellwinkel kommt dann noch das Problem hinzu dass der Abwind der vorderen Props die hinteren trifft. Beim gedachten Extrem 90° Motorkippung ist es eigentlich kein Quad mehr, sondern ein Koax-Bicopter (und ratet mal, warum ein Bicopter Servos braucht).
Roll wird zu Yaw oder umgekehrt wie auch immer man es sehen will (das ist aber auch beim angestellten Acro/LoS-Fliegen so, da knüppelt man ja auch mit Roll durch die Kurve) - und zu einer Wirkrichtung - das ist das Hauptproblem beim Tilt-Motor-Konzept - und das läßt sich auch nicht "irgendwie" in Software kompensieren. Das ist ein Problem der Flugphysik.
Bei geneigter Propellerebene bleiben die Wirkrichtungen orthogonal - das ist ja ein ganz normaler Quad wo die Cam oder evtl. die Centerplate oder der mittlere Aufbau oder was auch immer in irgend eine, für die Flugphysik irrelevante, Richtung zeigen.
Die Mischer-Lösungen wie z.B. von Ferdl vorgeschlagen verschieben das Drehkoordinaten-System etwas in "Blickrichtung" wenn die Roll-Wirkachse nicht mehr genau in Kamerarichtung zeigt - kann man bei beiden Konzepten machen, ist an sich eine gute Idee. Bisher haben es aber alle Piloten mit geneigten Kameras noch so zu fliegen gelernt und geben automatisch etwas Yaw bei Roll mit, und umgekehrt, das kommt automatisch (Schaut mal die Stickvideos von BorisB oder so).
Edit: ausführlicher, klarer formuliert, hoffentlich (Zeichnung nötig?)
Ferls Konzept wird aber funktionieren, ich bin gespannt
Gewinkelte Motoren sind einfach Murks weil zwei Wirkachsen (alt:yaw und alt:roll) sich aufeinander zu bewegen und nicht mehr strikt 90° zueinander (orthogonal) sind wie die FC es üblicherweise erwartet. Bei (theoretischer) 90° Kippung der Motoren passiert bei zwei Aktionen dasselbe:
- Unterschiedliches Yaw-Moment => Drehung um alt:Roll
- Unterschiedliche Drehzahlen rechts und links => Drehung um alt:Roll
- Und Pitch fehlt, weil dafür kein Hebel bezogen auf den CoG mehr da ist.
Bei 10-20° Kippung merkt man davon noch nichts, aber trotzdem ist die Flugphysik nicht "sauber", weil die Yaw-Drehachse (immer senkrecht zu den Propellern) und die Roll-Drehachse (gedachte Verbindungsline der vorderen und hinteren Motoren bzw. normale Längsachse) nicht orthogonal sind, sondern nun 70-80° beträgt - die Achsen beeinflussen sich gegenseitig, damit auch die Regelung, die von unabhängigen Achsen ausgeht. Deshalb ist überhaupt spezielle Tilt-Software in der FC vonnöten.
Ab irgend einem Anstellwinkel kommt dann noch das Problem hinzu dass der Abwind der vorderen Props die hinteren trifft. Beim gedachten Extrem 90° Motorkippung ist es eigentlich kein Quad mehr, sondern ein Koax-Bicopter (und ratet mal, warum ein Bicopter Servos braucht).
Roll wird zu Yaw oder umgekehrt wie auch immer man es sehen will (das ist aber auch beim angestellten Acro/LoS-Fliegen so, da knüppelt man ja auch mit Roll durch die Kurve) - und zu einer Wirkrichtung - das ist das Hauptproblem beim Tilt-Motor-Konzept - und das läßt sich auch nicht "irgendwie" in Software kompensieren. Das ist ein Problem der Flugphysik.
Bei geneigter Propellerebene bleiben die Wirkrichtungen orthogonal - das ist ja ein ganz normaler Quad wo die Cam oder evtl. die Centerplate oder der mittlere Aufbau oder was auch immer in irgend eine, für die Flugphysik irrelevante, Richtung zeigen.
Die Mischer-Lösungen wie z.B. von Ferdl vorgeschlagen verschieben das Drehkoordinaten-System etwas in "Blickrichtung" wenn die Roll-Wirkachse nicht mehr genau in Kamerarichtung zeigt - kann man bei beiden Konzepten machen, ist an sich eine gute Idee. Bisher haben es aber alle Piloten mit geneigten Kameras noch so zu fliegen gelernt und geben automatisch etwas Yaw bei Roll mit, und umgekehrt, das kommt automatisch (Schaut mal die Stickvideos von BorisB oder so).
Edit: ausführlicher, klarer formuliert, hoffentlich (Zeichnung nötig?)
Ferls Konzept wird aber funktionieren, ich bin gespannt
Zuletzt bearbeitet:
Ersteres Ja, zweiteres Ja grundsätzlich auch, stimmt.
Cleanflight/baseflight und sicher auch OpenPilot kann die FC/IMU in Software "virtuell" zu den Wirkachsen verdrehen - bei meinem Copter ist 270° Yaw (wg. USB Seitlich) und -35° Roll (wegen den angestellten Armen) eingestellt und damit denkt die FC Propellerebene gerade ist gerade = Schweben und damit ist es gut.
Cleanflight/baseflight und sicher auch OpenPilot kann die FC/IMU in Software "virtuell" zu den Wirkachsen verdrehen - bei meinem Copter ist 270° Yaw (wg. USB Seitlich) und -35° Roll (wegen den angestellten Armen) eingestellt und damit denkt die FC Propellerebene gerade ist gerade = Schweben und damit ist es gut.
Zuletzt bearbeitet:
Gewinkelte Motoren sind einfach Murks weil zwei Wirkachsen (alt:yaw und alt:roll) sich aufeinander zu bewegen und nicht mehr strikt 90° zueinander (orthogonal) sind wie die FC es üblicherweise erwartet. Bei (theoretischer) 90° Kippung der Motoren passiert bei zwei Aktionen dasselbe:
- Unterschiedliches Yaw-Moment => Drehung um alt:Roll
- Unterschiedliche Drehzahlen rechts und links => Drehung um alt:Roll
- Und Pitch fehlt, weil dafür kein Hebel bezogen auf den CoG mehr da ist.
Bei 10-20° Kippung merkt man davon noch nichts, aber trotzdem ist die Flugphysik nicht "sauber", weil die Yaw-Drehachse (immer senkrecht zu den Propellern) und die Roll-Drehachse (gedachte Verbindungsline der vorderen und hinteren Motoren bzw. normale Längsachse) nicht orthogonal sind, sondern nun 70-80° beträgt - die Achsen beeinflussen sich gegenseitig, damit auch die Regelung, die von unabhängigen Achsen ausgeht. Deshalb ist überhaupt spezielle Tilt-Software in der FC vonnöten.
Ab irgend einem Anstellwinkel kommt dann noch das Problem hinzu dass der Abwind der vorderen Props die hinteren trifft. Beim gedachten Extrem 90° Motorkippung ist es eigentlich kein Quad mehr, sondern ein Koax-Bicopter (und ratet mal, warum ein Bicopter Servos braucht).
- Unterschiedliches Yaw-Moment => Drehung um alt:Roll
- Unterschiedliche Drehzahlen rechts und links => Drehung um alt:Roll
- Und Pitch fehlt, weil dafür kein Hebel bezogen auf den CoG mehr da ist.
Bei 10-20° Kippung merkt man davon noch nichts, aber trotzdem ist die Flugphysik nicht "sauber", weil die Yaw-Drehachse (immer senkrecht zu den Propellern) und die Roll-Drehachse (gedachte Verbindungsline der vorderen und hinteren Motoren bzw. normale Längsachse) nicht orthogonal sind, sondern nun 70-80° beträgt - die Achsen beeinflussen sich gegenseitig, damit auch die Regelung, die von unabhängigen Achsen ausgeht. Deshalb ist überhaupt spezielle Tilt-Software in der FC vonnöten.
Ab irgend einem Anstellwinkel kommt dann noch das Problem hinzu dass der Abwind der vorderen Props die hinteren trifft. Beim gedachten Extrem 90° Motorkippung ist es eigentlich kein Quad mehr, sondern ein Koax-Bicopter (und ratet mal, warum ein Bicopter Servos braucht).
Die Probelme, zumindest diejenigen, die sich physikalisch/aerodynamisch ergeben, liesen sich aber dadurch lösen, dass die hinteren Props höher angebracht sind als die vorderen. Dadurch hätte man den Hebel für pitch wieder und der Propwash der vorderen Propeller würde auch die Hintern nich beeinflussen.
Zusätzlich hätte man einen kleineren Frontalquerschnitt als mit der geneigten Ebene.
Natürlich bleibt das Softwareproblem der FC, was du beschrieben hast. Aber Softwareprobleme kann man ja lösen ... also ich nicht, aber "man"

Moin,
habe mit dem DERBE erst einen Flug machen können und habe dabei folgendes beobachtet...: Bei normalem Speedflug ist alles okay, aber wenn man in den Kurven Gas rausnimmt, dann wirken die Arme natürlich wie riesige Bremsflächen (da der Einfluss des Propeller-Jets wegfällt). Leider wirken diese Bremsflächen mal wieder nicht symmetrisch, und der Copter giert nach außen... Die Gierachse ist bei Coptern echt ein Problem, da werden (im Vergleich zu Roll und Nick) nur mickrige Kräfte erzeugt... Sobald da aerodynamisch irgendwas passiert reicht das Giermoment nicht mehr aus. Ich könnte die Propeller alle anwinkeln um das Giermoment zu erhöhen, aber das ist auch nur Bastelei. Ich werde bald Windkanalmessungen machen und dann weiß ich endlich mal etwas genauer wie die Strömung unter den Propellern verläuft.
Aerodynamisch günstige und gleichzeitig "giermomentneutrale" Copter zu zeichnen scheint gar nicht so einfach zu sein...
Die "Krieger" Idee und die Gedanken dahinter gefallen mir aber auch außerordentlich gut
habe mit dem DERBE erst einen Flug machen können und habe dabei folgendes beobachtet...: Bei normalem Speedflug ist alles okay, aber wenn man in den Kurven Gas rausnimmt, dann wirken die Arme natürlich wie riesige Bremsflächen (da der Einfluss des Propeller-Jets wegfällt). Leider wirken diese Bremsflächen mal wieder nicht symmetrisch, und der Copter giert nach außen... Die Gierachse ist bei Coptern echt ein Problem, da werden (im Vergleich zu Roll und Nick) nur mickrige Kräfte erzeugt... Sobald da aerodynamisch irgendwas passiert reicht das Giermoment nicht mehr aus. Ich könnte die Propeller alle anwinkeln um das Giermoment zu erhöhen, aber das ist auch nur Bastelei. Ich werde bald Windkanalmessungen machen und dann weiß ich endlich mal etwas genauer wie die Strömung unter den Propellern verläuft.
Aerodynamisch günstige und gleichzeitig "giermomentneutrale" Copter zu zeichnen scheint gar nicht so einfach zu sein...
Die "Krieger" Idee und die Gedanken dahinter gefallen mir aber auch außerordentlich gut
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

