
das liegt daran dass es seit v0.87 einen neuen absolute mode gibt, denn du eingestellt hast ... der "alte" heisst nun "absolute centered" oder so, stell den wieder ein und es ist wie früher
(steht übrigens auch schon im Wiki: http://www.olliw.eu/storm32bgc-wiki/Configure_the_RC_Input)
DANKE für die Daten, werde ich mir gleich mal ansehen")
EDIT: here we are
das ist schon interessant
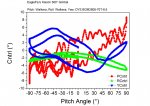
1. pitch:
das sieht viel besser aus, die Öffnung ist viel kleiner, die Oscillationen sind ähnlich wie zuvor
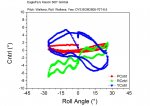
2. roll:
nur kleine Öffnung, kleine Oscillationen, und die Oscillationen sind quasi Sinus-förmig ... nach diesen Kriterien bisher der beste Motor den ich gesehen habe
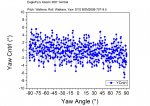
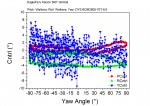
3. yaw:
das Bild ist ganz ähnlich zu dem beim Mobius Gimbal, praktisch keine Öffnung aber ausgeüpräkte sehr "kurze" Oscillationen ... das scheint also sehr charakteristisch für diesen Motor-Typ zu sein
EDIT II:
könntest du für die 6 Motoren noch mit angeben was die Batterie-Spannung und der Vmax jeweis waren?
Mobius Batterie Spannung:
Mobius Pitch Vmax:
Mobius Roll Vmax:
Mobius Yaw Vmax:
Xiamoi Batterie Spannung:
Xiamoi Pitch Vmax:
Xiamoi Roll Vmax:
Xiamoi Yaw Vmax:
(steht übrigens auch schon im Wiki: http://www.olliw.eu/storm32bgc-wiki/Configure_the_RC_Input)
DANKE für die Daten, werde ich mir gleich mal ansehen
EDIT: here we are
das ist schon interessant
1. pitch:
das sieht viel besser aus, die Öffnung ist viel kleiner, die Oscillationen sind ähnlich wie zuvor
2. roll:
nur kleine Öffnung, kleine Oscillationen, und die Oscillationen sind quasi Sinus-förmig ... nach diesen Kriterien bisher der beste Motor den ich gesehen habe
3. yaw:
das Bild ist ganz ähnlich zu dem beim Mobius Gimbal, praktisch keine Öffnung aber ausgeüpräkte sehr "kurze" Oscillationen ... das scheint also sehr charakteristisch für diesen Motor-Typ zu sein
EDIT II:
könntest du für die 6 Motoren noch mit angeben was die Batterie-Spannung und der Vmax jeweis waren?
Mobius Batterie Spannung:
Mobius Pitch Vmax:
Mobius Roll Vmax:
Mobius Yaw Vmax:
Xiamoi Batterie Spannung:
Xiamoi Pitch Vmax:
Xiamoi Roll Vmax:
Xiamoi Yaw Vmax:
Anhänge
-
 310,9 KB Aufrufe: 20
310,9 KB Aufrufe: 20 -
 276,7 KB Aufrufe: 19
276,7 KB Aufrufe: 19 -
 375,6 KB Aufrufe: 20
375,6 KB Aufrufe: 20 -
 341,1 KB Aufrufe: 20
341,1 KB Aufrufe: 20 -
 305,1 KB Aufrufe: 20
305,1 KB Aufrufe: 20 -
 422,6 KB Aufrufe: 20
422,6 KB Aufrufe: 20
Zuletzt bearbeitet:


