
STorM32 BGC: 3-Achsen STM32 Brushless Gimbal Controller
- Themenstarter OlliW
- Beginndatum
@Andreas
zum Gimbal gehts hier, aktuell grad 135€ netto bei rcmaster.
http://fpv-community.de/showthread.php?60783-Wer-Kennt-dieses-Gimbal
Ansonsten das übliche - hdmi converter & das gute, teure gentwire multi für Sonycams zum steuern.
Dank der Tips von @amadeus hab ich ebenfalls die originalen Gummidämpfer draussen und das ganze auf Alphagel Würfeln
zum Gimbal gehts hier, aktuell grad 135€ netto bei rcmaster.
http://fpv-community.de/showthread.php?60783-Wer-Kennt-dieses-Gimbal
Ansonsten das übliche - hdmi converter & das gute, teure gentwire multi für Sonycams zum steuern.
Dank der Tips von @amadeus hab ich ebenfalls die originalen Gummidämpfer draussen und das ganze auf Alphagel Würfeln
@sepper:
sehr schönes Video!! Muss ich doch gleich mal im NT Thread verlinken
War das "full" oder "full v2"?
Zu den Mikrovibrationen ... der Fleck ist da ja wirklich super Indikator, sehr nützlich. Diesbezüglich will ich ja auch noch den Controller verbessern, wenn mir möglich, siehe meine Proritätenliste in #1264 ... nur, hat sich da schon mal Jemand genauer Gedanken zu gemacht, was das für Vibrationen an der Kamera sind die Mikrovibrationen auslösen? Also, welche Amplitude und Frequenz? So richtig klar ist mir das nicht, vorallem auch im Unterschied zum Jello. Irgend ne Idee?
sehr schönes Video!! Muss ich doch gleich mal im NT Thread verlinken
War das "full" oder "full v2"?
Zu den Mikrovibrationen ... der Fleck ist da ja wirklich super Indikator, sehr nützlich. Diesbezüglich will ich ja auch noch den Controller verbessern, wenn mir möglich, siehe meine Proritätenliste in #1264 ... nur, hat sich da schon mal Jemand genauer Gedanken zu gemacht, was das für Vibrationen an der Kamera sind die Mikrovibrationen auslösen? Also, welche Amplitude und Frequenz? So richtig klar ist mir das nicht, vorallem auch im Unterschied zum Jello. Irgend ne Idee?
Moin
Ich konnte heute Mittag nochmals einen Testflug mit der RX 10 II und radikal geänderten Parametern einen Flug machen. Das Bild war top, kein Vergleich zu meinen Flügen am Wochenende. Was wurde geändert: Den Gyro LPF auf 9ms raufgestellt, dadurch konnte ich die PID Werte sehr stark anheben, vorallem der D-Anteil, ca. um den Faktor 2. Weiter habe ich nun das Yaw Pan Deadband auf 1 gestellt, Yaw Pan auf 1, Hysteresys und Limiter auf 0.
Ein richtiges Hängenbleiben konnte ich nicht feststellen. Allerdings hat sich der Controller auf der Yaw Achse nach ca. 2min Flug verabschiedet. Plötzlich drehte das Gimbal wie wild auf der Yaw Achse.... Pitch und Roll waren aber schön im Lot... Nach einem Neustart alles wieder normal (zumindest am Boden).
Um einen Vergleich zu früheren Flügen mit dem Alexmos Controller zu bekommen, habe ich mir noch einige Videos von diesem Sommer reingezogen. Für mich ist der Unterschied sehr deutlich erkennbar. Beim Alexmos kommen die Yaw Bewegungen sehr sanft, schon fast träge daher. Schwierig zu beschreiben, wie ein sanftes Dahingleiten...
Die Videos mit dem Storm Controller kommen mir auf Yaw eher "nervös" daher. Es gibt dem Video ein ganz anderer Touch.
Ich habe versucht die Unterschiede zu visualisieren:
Bei einem Yaw Richtungswechsel versucht der Storm möglichst rasch auf den Sollwert zu gelangen (der kleine zappelige, nervöse Junge, bildlich ausgedrückt). Der Alexmos nimmt die Sache gelassen und fährt schön sachte auf den Sollwert, egal auch wenns ewas länger dauert bis die Abweichung wirklich auskorrigiert ist.
Versteht überhaupt noch irgendjemand irgendwas?
Gruss Michael
Ich konnte heute Mittag nochmals einen Testflug mit der RX 10 II und radikal geänderten Parametern einen Flug machen. Das Bild war top, kein Vergleich zu meinen Flügen am Wochenende. Was wurde geändert: Den Gyro LPF auf 9ms raufgestellt, dadurch konnte ich die PID Werte sehr stark anheben, vorallem der D-Anteil, ca. um den Faktor 2. Weiter habe ich nun das Yaw Pan Deadband auf 1 gestellt, Yaw Pan auf 1, Hysteresys und Limiter auf 0.
Ein richtiges Hängenbleiben konnte ich nicht feststellen. Allerdings hat sich der Controller auf der Yaw Achse nach ca. 2min Flug verabschiedet. Plötzlich drehte das Gimbal wie wild auf der Yaw Achse.... Pitch und Roll waren aber schön im Lot... Nach einem Neustart alles wieder normal (zumindest am Boden).
Um einen Vergleich zu früheren Flügen mit dem Alexmos Controller zu bekommen, habe ich mir noch einige Videos von diesem Sommer reingezogen. Für mich ist der Unterschied sehr deutlich erkennbar. Beim Alexmos kommen die Yaw Bewegungen sehr sanft, schon fast träge daher. Schwierig zu beschreiben, wie ein sanftes Dahingleiten...
Die Videos mit dem Storm Controller kommen mir auf Yaw eher "nervös" daher. Es gibt dem Video ein ganz anderer Touch.
Ich habe versucht die Unterschiede zu visualisieren:
Bei einem Yaw Richtungswechsel versucht der Storm möglichst rasch auf den Sollwert zu gelangen (der kleine zappelige, nervöse Junge
, bildlich ausgedrückt). Der Alexmos nimmt die Sache gelassen und fährt schön sachte auf den Sollwert, egal auch wenns ewas länger dauert bis die Abweichung wirklich auskorrigiert ist.Versteht überhaupt noch irgendjemand irgendwas?
Gruss Michael
Hi Olli,
ich habe heute auch die 0.88d auf mein kleines EagleEi Mobius 360° drauf gespielt und auch auf full V2 umgestellt, das Gimbal scheint aktuell noch stabiler und sauberer zu arbeiten, zumindest in de Hand und mit dem RC-command-tool.
Ich erstelle dir jetzt noch eine Motoraufzeichnung für alle drei Motoren um in der Tiefe evtl. die Unterschiede zu sehen.
ich habe heute auch die 0.88d auf mein kleines EagleEi Mobius 360° drauf gespielt und auch auf full V2 umgestellt, das Gimbal scheint aktuell noch stabiler und sauberer zu arbeiten, zumindest in de Hand und mit dem RC-command-tool.
Ich erstelle dir jetzt noch eine Motoraufzeichnung für alle drei Motoren um in der Tiefe evtl. die Unterschiede zu sehen.
@RC-Racer:
steht alles im Wiki: http://www.olliw.eu/storm32bgc-wiki/Using_a_2nd_IMU#Installation_Options
@EagleFly:
das klingt js ganz gut, DANKE für die Rückmeldung
neue Motorkurven lohnt sich nicht zu machen ... das habe ich ausgiebig probiert, die sind faktisch unabhängig von fast allen Controllereinstellungen, wie den PIDs, IMU, etc. (aber natürlich nicht von Vmax LOL)
@buckker:
DANKE für diese Rückmeldung
jo, Gyro LPF kann ganz wichtig sein ... in der nächste GUI kommt der Parameter daher auch zu den PIDs
Wegen dem Yaw, ich denke ich verstehe schon was du meinst, aber: Du hattest Yaw LPF = 0??? Wenn ja, dann probiere doch mal Yaw LPF 1s oder 1.5s, dass sollte die Sache etwas "runder" machen. Wegen dem langsamen Einschwenken, dass sollte doch der Yaw Pan Werte eigentlich machen, heisst wenn es dir zu schnell geht, dann mache doch Yaw Pan noch kleiner, wenn die Kamera als Folge zu weit ausgelenkt wird, dann den Limiter benutzen.
Das mit dem Ausrasten nach 2 min macht mir jetzt ein bischen "Angst". Hattest du die 2te Imu mit "full v2" aktiviert, oder "full", oder gar keine 2te Imu?
steht alles im Wiki: http://www.olliw.eu/storm32bgc-wiki/Using_a_2nd_IMU#Installation_Options
The external IMU module would be connected to the I2C#2 connector on the bottom side of the STorM32 board. Doing so automatically selects the external IMU module as 2nd IMU. If no IMU module is connected to I2C#2, the on-board IMU is selected. So you don't have to change anything in the GUI, the external IMU module is used automatically when connected.
Comment: The on-board mpu6050 IMU is connected to the I2C#2 connector internally and is set to a non default i2c address. If you connect an external IMU to the I2C#2 connector it can be recognized by its default i2c address and is selected.
Comment: The on-board mpu6050 IMU is connected to the I2C#2 connector internally and is set to a non default i2c address. If you connect an external IMU to the I2C#2 connector it can be recognized by its default i2c address and is selected.
das klingt js ganz gut, DANKE für die Rückmeldung
neue Motorkurven lohnt sich nicht zu machen ... das habe ich ausgiebig probiert, die sind faktisch unabhängig von fast allen Controllereinstellungen, wie den PIDs, IMU, etc. (aber natürlich nicht von Vmax LOL)
@buckker:
DANKE für diese Rückmeldung
jo, Gyro LPF kann ganz wichtig sein ... in der nächste GUI kommt der Parameter daher auch zu den PIDs
Wegen dem Yaw, ich denke ich verstehe schon was du meinst, aber: Du hattest Yaw LPF = 0??? Wenn ja, dann probiere doch mal Yaw LPF 1s oder 1.5s, dass sollte die Sache etwas "runder" machen. Wegen dem langsamen Einschwenken, dass sollte doch der Yaw Pan Werte eigentlich machen, heisst wenn es dir zu schnell geht, dann mache doch Yaw Pan noch kleiner, wenn die Kamera als Folge zu weit ausgelenkt wird, dann den Limiter benutzen.
Das mit dem Ausrasten nach 2 min macht mir jetzt ein bischen "Angst". Hattest du die 2te Imu mit "full v2" aktiviert, oder "full", oder gar keine 2te Imu?
Zuletzt bearbeitet:
Moin Olli
Ich habe Mist erzählt.. Yaw LPF natürlich auf 1.5s. Der Rest ist aber auf 0.
ok, ich werde noch einen Versuch mit einem kleineren Yaw Pan machen. Wie verhält sich die Sache wenn die Yaw Achse zum Pan Limiter läuft? Um so näher an der Pan Limiter Grenze umso schneller wird die Achse gedreht? Ich hatte auch schon mit dem Pan Limiter rumgespielt.. Aber irgendwie war das Ergebnis nicht wie gewünscht.
Ich hatte für den Flug am Mittag noch die alte "Full" Einstellung angewählt.
Gruss Michael
Ich habe Mist erzählt.. Yaw LPF natürlich auf 1.5s. Der Rest ist aber auf 0.
ok, ich werde noch einen Versuch mit einem kleineren Yaw Pan machen. Wie verhält sich die Sache wenn die Yaw Achse zum Pan Limiter läuft? Um so näher an der Pan Limiter Grenze umso schneller wird die Achse gedreht? Ich hatte auch schon mit dem Pan Limiter rumgespielt.. Aber irgendwie war das Ergebnis nicht wie gewünscht.
Ich hatte für den Flug am Mittag noch die alte "Full" Einstellung angewählt.
Gruss Michael
Zuletzt bearbeitet:
neue Motorkurven lohnt sich nicht zu machen ... das habe ich ausgiebig probiert, die sind faktisch unabhängig von fast allen Controllereinstellungen, wie den PIDs, IMU, etc. (aber natürlich nicht von Vmax LOL)
Wenn das was mit den coolen Graphen zu tun hat die du letztens hier gepostet hast würde mich da genaueres drüber interessieren.
@buckker:
ok, Danke
dann war der "neue" LPF Mechanismus noch nicht wirksam
Pan Limiter ist eigentlich nichts anderes als ein Expo
ah, gut das es full und nicht full v2 war, der Aussetzer also kein Problem des neuen 2ten Imu Algorithmus anzeigt
@hexacopter:
ja, das sind diese "coolen" Graphen
wie die zu machen sind, musste mal die letzten Posts von EagleFly zurück scannen
ok, Danke
dann war der "neue" LPF Mechanismus noch nicht wirksam
Pan Limiter ist eigentlich nichts anderes als ein Expo
ah, gut das es full und nicht full v2 war, der Aussetzer also kein Problem des neuen 2ten Imu Algorithmus anzeigt
@hexacopter:
ja, das sind diese "coolen" Graphen
wie die zu machen sind, musste mal die letzten Posts von EagleFly zurück scannen
@sepper:
sehr schönes Video!! Muss ich doch gleich mal im NT Thread verlinken
War das "full" oder "full v2"?
Zu den Mikrovibrationen ... der Fleck ist da ja wirklich super Indikator, sehr nützlich. Diesbezüglich will ich ja auch noch den Controller verbessern, wenn mir möglich, siehe meine Proritätenliste in #1264 ... nur, hat sich da schon mal Jemand genauer Gedanken zu gemacht, was das für Vibrationen an der Kamera sind die Mikrovibrationen auslösen? Also, welche Amplitude und Frequenz? So richtig klar ist mir das nicht, vorallem auch im Unterschied zum Jello. Irgend ne Idee?
sehr schönes Video!! Muss ich doch gleich mal im NT Thread verlinken
War das "full" oder "full v2"?
Zu den Mikrovibrationen ... der Fleck ist da ja wirklich super Indikator, sehr nützlich. Diesbezüglich will ich ja auch noch den Controller verbessern, wenn mir möglich, siehe meine Proritätenliste in #1264 ... nur, hat sich da schon mal Jemand genauer Gedanken zu gemacht, was das für Vibrationen an der Kamera sind die Mikrovibrationen auslösen? Also, welche Amplitude und Frequenz? So richtig klar ist mir das nicht, vorallem auch im Unterschied zum Jello. Irgend ne Idee?
Einstellung war bei diesem Flug auf `full xy`, kein v2
Zu den Mikovibrationen - ich hoffe das ich es durch etwas Feintuning der PID´s wegbekomme, es also an nicht idealen Einstellungen liegt...Hardwaremäßig Copter/Cam/Gimbal wüsste ich nicht was ich noch verbessern könnte :-(
@amadeus
Bild mach ich noch, stells dann aber in den Gimbalthread - hab acht Würfel drin, originale Halterung.
Einstellung war bei diesem Flug auf `full xy`, kein v2
Zu den Mikovibrationen - ich hoffe das ich es durch etwas Feintuning der PID´s wegbekomme, es also an nicht idealen Einstellungen liegt...Hardwaremäßig Copter/Cam/Gimbal wüsste ich nicht was ich noch verbessern könnte :-(
(aber daran kämpft man ja nicht nur mit dem STorM32, ein Blick in z.B. ein Solo Thread reicht dazu)
wenn man (=ich LOL) nur die Mikrovibs besser verstehen würde ... dann könnte man vielleicht Firmwaremässig was machen
dein Video, Dank des FLecks, ist da ja echt interessant ... bisher dachte ich immer MikroVibs sind "schnelle" Vibrationen, d.h. mit Frequenzen ähnlich der Framerate, aber wenn man sich den Fleck ansieht dann wackelt der ja viel langsammer als mit 30Hz ... kommen Mikrovibs also tatsächlich von kleinen, aber relativ langsamen Vibrationen ??? Das müsste man ja dann perfekt mit nem Datenlogger sehen ... ich glaube ich muss dir nen NT Logger besorgen LOL
EDIT: Kommt meine Überlegung hin, dass eine Verschiebung des Bilds um ca 1 Pixelreihe einer Drehung der Camera um etwa 0.1° entspricht?
EDIT II: Es gibt ja die Programme die MikroVibs wegrechnen, ich denke die machen nichts anderes als das Bild Frame für Frame dementsprechend zuverschieben ... was nun hoch interessant wäre, wäre diese "Verschiebungs"-Daten zu haben, also für jedes Frame die Datenum wieviel wohin das Bild verschoben wurde ... ist hier irgendein Video-Experte der wüsste wie man an solche Daten kommt, bzw. es gar könnte diese aus nem Video zu extrahieren ???
EDIT III: Habe mal schnell gegoogelt, das Ding das ichnachfrage heisst möglicherweise Vibration Vector
Zuletzt bearbeitet:
@buckker:
@hexacopter:
ja, das sind diese "coolen" Graphen
wie die zu machen sind, musste mal die letzten Posts von EagleFly zurück scannen
@hexacopter:
ja, das sind diese "coolen" Graphen
wie die zu machen sind, musste mal die letzten Posts von EagleFly zurück scannen
@ Olli, deine Motorensammlung ist Klasse! Tolle Arbeit!
Wenn ich morgen endlich mal dazu komme, Liefere ich dir die Motorkurven nach, magst du beide Gimbals haben, das Mobius 360 und das Xiaomi 360 Gimbal?
Wenn ich morgen endlich mal dazu komme, Liefere ich dir die Motorkurven nach, magst du beide Gimbals haben, das Mobius 360 und das Xiaomi 360 Gimbal?
Hi Olli,
ich hab dir soeben schon mal die Motordaten von der dem EagleEi Mobius 360° Gimbal aufgezeichnet.
ich hab dir soeben schon mal die Motordaten von der dem EagleEi Mobius 360° Gimbal aufgezeichnet.
Hey Olli, Ich bin nach deiner Anleitungen vorgegangen, Pitch, Roll haben gut funktioniert, bei YAW hatte ich den Eindruck dass er die Position verliert, liegt dies evtl. Daran dass du die IUM2 deaktiviert haben möchtest? Zusätzlich hatte das Gimbal in der Hand, evtl. War das der Grund.
Ich werde nochmals in eine Halterung einspannen und noch einen Lauf durchführen.
Gruß Benny
Ich werde nochmals in eine Halterung einspannen und noch einen Lauf durchführen.
Gruß Benny
ja, sorry, habe den Thread verwechselt: http://fpv-community.de/showthread....ius-Action-Cam&p=897056&viewfull=1#post897056
Schade
das ist - leider - der Punkt an der es meistens hängen bleibt ... alles schon ganz gut aber nicht perfekt wegen z.B. Mikrovibs ... da kann man sich zu Tode knobeln weil es doch ein komplexes Zusammenspiel von Copter-Regelung, Dämpungssystem, und Gimbal-Regelung ist ...
(aber daran kämpft man ja nicht nur mit dem STorM32, ein Blick in z.B. ein Solo Thread reicht dazu)
wenn man (=ich LOL) nur die Mikrovibs besser verstehen würde ... dann könnte man vielleicht Firmwaremässig was machen
dein Video, Dank des FLecks, ist da ja echt interessant ... bisher dachte ich immer MikroVibs sind "schnelle" Vibrationen, d.h. mit Frequenzen ähnlich der Framerate, aber wenn man sich den Fleck ansieht dann wackelt der ja viel langsammer als mit 30Hz ... kommen Mikrovibs also tatsächlich von kleinen, aber relativ langsamen Vibrationen ??? Das müsste man ja dann perfekt mit nem Datenlogger sehen ... ich glaube ich muss dir nen NT Logger besorgen LOL
das ist - leider - der Punkt an der es meistens hängen bleibt ... alles schon ganz gut aber nicht perfekt wegen z.B. Mikrovibs ... da kann man sich zu Tode knobeln weil es doch ein komplexes Zusammenspiel von Copter-Regelung, Dämpungssystem, und Gimbal-Regelung ist ...
(aber daran kämpft man ja nicht nur mit dem STorM32, ein Blick in z.B. ein Solo Thread reicht dazu)
wenn man (=ich LOL) nur die Mikrovibs besser verstehen würde ... dann könnte man vielleicht Firmwaremässig was machen
dein Video, Dank des FLecks, ist da ja echt interessant ... bisher dachte ich immer MikroVibs sind "schnelle" Vibrationen, d.h. mit Frequenzen ähnlich der Framerate, aber wenn man sich den Fleck ansieht dann wackelt der ja viel langsammer als mit 30Hz ... kommen Mikrovibs also tatsächlich von kleinen, aber relativ langsamen Vibrationen ??? Das müsste man ja dann perfekt mit nem Datenlogger sehen ... ich glaube ich muss dir nen NT Logger besorgen LOL
))NT Logger - schick mir mal nen Bestellink
Zu deinen anderen EDIT´s bin ich überfragt...
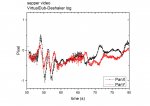
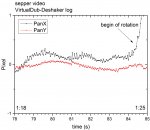
das VirtualDub Plugin Deshaker speichert nen .log File, in denm die Verschiebungen gespeichert werden (http://www.guthspot.se/video/deshaker.htm)
habe ich gleich mal angewendet
Demnach sind die MikroVibs deutlich kleiner als ein Pixel ???? Macht das Sinn ???
Wenn man den Fleck mit nem Finger verdeckt kommt es mir trotzdem so vor als ob es mikrovibriert ... muss dann wohl Einbildung sein ??? Oder ???
habe ich gleich mal angewendet
Demnach sind die MikroVibs deutlich kleiner als ein Pixel ???? Macht das Sinn ???
Wenn man den Fleck mit nem Finger verdeckt kommt es mir trotzdem so vor als ob es mikrovibriert ... muss dann wohl Einbildung sein ??? Oder ???
Anhänge
-
 347,3 KB Aufrufe: 15
347,3 KB Aufrufe: 15 -
 254,7 KB Aufrufe: 16
254,7 KB Aufrufe: 16
Zuletzt bearbeitet:
ja, sorry, habe den Thread verwechselt: http://fpv-community.de/showthread....ius-Action-Cam&p=897056&viewfull=1#post897056
Edit.:
Wenn man den Fleck mit nem Finger verdeckt kommt es mir trotzdem so vor als ob es mikrovibriert ... muss dann wohl Einbildung sein ??? Oder ???
Das auf Bildbewegungen trainierte menschliche Gehirn scheint solche minimalen Abweichungen also anscheinend feststellen zu können, da es das komplette Bild im ganzen analysiert.
Keine Ahnung was der deshaker da genau ausspuckt.
@sepper Bist du mit AF geflogen oder war die Linse manuell fokussiert? Ich glaube es zwar nicht, aber nicht das es nachher ein Mikro pumpen ist was wir da sehen.
Zuletzt bearbeitet:
Demnach sind die MikroVibs deutlich kleiner als ein Pixel ???? Macht das Sinn ???
@Hexakopter
Stimmt, das Pumpen ist da - hab das Video selbst noch gar nicht so auseinandergenommen
Das `Pumpen` ist ein Camproblem, hab ich mit beiden Sony´s, 5100&6000 und dafür auch noch keine Rechte Lösung :-(
Mir scheint es als möchte er fokusieren obwohl der Autofokus aus ist. Sehr ärgerlich, tritt aber sehr selten auf.
Die Cam war beim Video im Fotomodus, 19mm Festbrennweite/ Manueller Focus- Hyperfokale Distanz. Habe im Flug auf rec geschalten, starte für Video so eigentlich nie. Ich nehme an das er beim Umschalten die letzte Video -Einstellung der Cam nimmt, wäre hier `Programmautomatik`gewesen.

